{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 BXAK 的问题《发一个红外线解码程序+仿真文件(可定义任意I/O作接收脚,支持长/短按,自适应主频6MHz~40》','https://www.xiaopingtou.net/q-161102.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
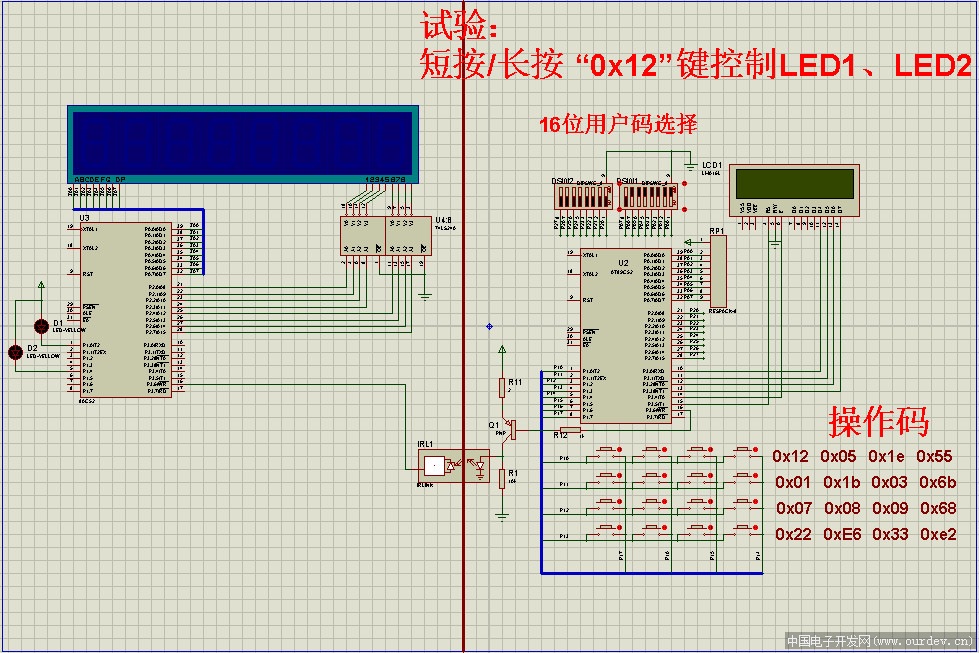
(原文件名:TP0.jpg)
//*********************【 NEC解码头文件 】*******************
//
// 简介:本程序适用于NCE解码:(9ms+4.5ms)引导码+32位编码。
// 兼容STC所有型号(包括 1T 和 12T 系列),可以定义任意I/O作红外接收脚,
// 自适应解码主频:6MHz ~ 40MHz。
//
// 使用条件:占用系统定时器0,开启定时器0中断(如使用其它定时器请自改IR_Init();初始化函数)
//
// 使用说明:填相关宏定义:USER_H、USER_L、Check_EN、CPU_Fosc、IR,
// 上电初始化函数IR_Init(),
// 在定时器0中断中调用IR_NEC()解码函数,
// 解码有效时,IR_BT=2即短按,IR_BT=3即长按,由用户清0,
// 解码存放:用户码高8位NEC[0],用户码低8位NEC[1],操作码NEC[2],操作码反码NEC[3]。
//
//【供用户调用的函数】
// IR_Init(); //接收初始化,开启定时器0中断400us
// IR_NEC(); //红外线解码(解NEC编码)
//
//***************************************************************/
#ifndef __IR_NEC_H__
#define __IR_NEC_H__
//【用户必填项:USER_H、USER_L、Check_EN、CPU_Fosc、IR】
#define USER_H 0x80 //用户码高8位
#define USER_L 0x7F //用户码低8位
#define Check_EN 0 //是否要校验16位用户码:不校验填0,校验则填1
#define CPU_Fosc 12000000L //输入主频,自适应解码(单位:Hz,范围:6MHz ~ 40MHz)
#define CA_S 8 //长按时间设置,单位:108mS(即 108mS整数倍,10倍以上为宜)
sbit IR = P3^6; //红外线接口(任意引脚)
#define Step 400 //红外采样步长:400us
#define TH_H ((65536-Step*(CPU_Fosc/300)/40000)/256) //定时器高8位基准赋值
#define TH_L ((65536-Step*(CPU_Fosc/300)/40000)%256) //定时器低8位基准赋值
uint8 IR_BT; //解码效果返回:0无效,1有效,2短按,3长按
uint8 NEC[4]; //解码存放:16位用户码、操作码正反码
uint8 cntCA; //长按计数
uint16 cntStep; //步数计
bit IRa,IRb; //接收脚电位状态保存
bit IRsync; //同步标志
uint8 BitN; //位码装载数
/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈
函数:红外线解码初始化
┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈*/
void IR_Init()
{
TMOD &= 0xF0; //清定时器0
TMOD |= 0x01; //定时器0:16位定时器
TL0 = TH_L; //每步时间
TH0 = TH_H;
ET0 = 1;
EA = 1;
TR0 = 1;
}
/*┈┈┈┈┈┈┈┈┈┈ 基准 ┈┈┈┈┈┈┈┈┈┈┈*/
#define Boot_Limit ((9000+4500 +1000)/Step) //引导码周期上限
#define Boot_Lower ((9000+4500 -1000)/Step) //引导码周期下限
#define Bit1_Limit ((2250 +800)/Step) //“1”周期上限
#define Bit0_Limit ((1125 +400)/Step) //“0”周期上限
/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈
函数:红外线NEC周期采样解码法(定时中断,下降沿查询周期时间)
全局变量:IR_BT = 0无效
1有效,待继续判断长、短按(如不需要判断长、短按,则直接使用)
2短按
3长按
┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈*/
void IR_NEC()
{
TL0 = TH_L; //重赋值
TH0 = TH_H;
cntStep++; //步数累加
if(IR_BT==1)if(cntStep>300)IR_BT=2; //解码有效后,如果无长按,120ms(400us×300)后默认短按
IRb = IRa; //保存上次电位状态
IRa = IR; //保存当前电位状态
if(IRb && !IRa) //是否下降沿(上次高,当前低)
{
if(cntStep > Boot_Limit) //超过同步时间?
{
if(IR_BT==1)if(++cntCA>CA_S)IR_BT=3; //解码有效后,继续按住遥控>CA_S即长按
IRsync=0; //同步位清0
}
else if(cntStep > Boot_Lower){ IRsync=1; BitN=32; } //同步位置1,装载位码数32
else if(IRsync) //如果已同步
{
if(cntStep > Bit1_Limit)IRsync=0;
else
{
NEC[3] >>= 1;
if(cntStep > Bit0_Limit)NEC[3] |= 0x80; //“0”与“1”
if(--BitN == 0)
{
IRsync = 0; //同步位清0
#if (Check_EN == 1)
if((NEC[0]==USER_H)&&(NEC[1]==USER_L)&&(NEC[2]==~NEC[3])) //校验16位用户码、操作码正反码
{ IR_BT=1; cntCA=0; } //解码有效,接下来判断:短按?长按?
#else
if(NEC[2]==~NEC[3]){ IR_BT=1; cntCA=0; } //只校验操作码正反码
#endif
}
else if((BitN & 0x07)== 0) //NEC[3]每装满8位,移动保存一次(即 BitN%8 == 0)
{ NEC[0]=NEC[1]; NEC[1]=NEC[2]; NEC[2]=NEC[3]; }
}
}
cntStep = 0; //步数计清0
}
}
//取消相关宏定义
#undef CPU_Fosc
#endif
主程序
#include "INCSTC89C52RC.H"
#include "INCMY_SET.H"
#include "INCIR_NEC.H" //调用NEC解码头文件
sfr SE = 0x80; //数码管段选 P0:0x80 P1:0x90
sbit WX1 = P2^0; //数码管位显
sbit WX2 = P2^1;
sbit WX3 = P2^2;
sbit WX4 = P2^3;
sbit WX5 = P2^4;
sbit WX6 = P2^5;
sbit WX7 = P2^6;
sbit WX8 = P2^7;
uint8c tab[] = {0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0X88,0X83,0XC6,0XA1,0X86,0X8E,0xFF};
uint8 Xn,X1,X2,X3,X4,X5,X6;
void KZ0(); //短按处理
void KZ1(); //长按处理
/***************** 主函数 ********************/
void main(void)
{
IR_Init(); //红外线解码初始化
while(1)
{
//遥控检测
if((IR_BT==2)||(IR_BT==3))
{
if(IR_BT==2)KZ0(); //短按处理
else KZ1(); //长按处理
IR_BT =0; //清有效标志
X1 = NEC[0]/16; //更新显示
X2 = NEC[0]%16;
X3 = NEC[1]/16;
X4 = NEC[1]%16;
X5 = NEC[2]/16;
X6 = NEC[2]%16;
}
}
}
/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈
函数:遥控短按处理
┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈*/
void KZ0()
{
switch(NEC[2])
{
case 0x12: P10 = !P10; break;
case 0x05: break;
case 0x1E: break;
case 0x55: break;
case 0x01: break;
case 0x1B: break;
case 0x03: break;
case 0x6B: break;
case 0x07: break;
case 0x08: break;
case 0x09: break;
case 0x68: break;
case 0x22: break;
case 0xE6: break;
case 0x33: break;
case 0xE2: break;
default:break;
}
}
/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈
函数:遥控长按处理
┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈*/
void KZ1()
{
switch(NEC[2])
{
case 0x12: P14 = !P14; break;
case 0x05: break;
case 0x1E: break;
case 0x55: break;
case 0x01: break;
case 0x1B: break;
case 0x03: break;
case 0x6B: break;
case 0x07: break;
case 0x08: break;
case 0x09: break;
case 0x68: break;
case 0x22: break;
case 0xE6: break;
case 0x33: break;
case 0xE2: break;
default:break;
}
}
/*********************数码管扫描*************************/
void XS(void)
{
if(++Xn > 7)Xn=0;
switch(Xn)
{
case 0: WX8=1; NOP; //屏蔽上个位显
SE=tab[X1]; //送段码
WX1=0; //开位显
break;
case 1: WX1=1; NOP; SE=tab[X2]; WX2=0; break;
case 2: WX2=1; NOP; SE=tab[X3]; WX3=0; break;
case 3: WX3=1; NOP; SE=tab[X4]; WX4=0; break;
case 4: WX4=1; NOP; SE=tab[16]; WX5=0; break;
case 5: WX5=1; NOP; SE=tab[16]; WX6=0; break;
case 6: WX6=1; NOP; SE=tab[X5]; WX7=0; break;
case 7: WX7=1; NOP; SE=tab[X6]; WX8=0; break;
default:break;
}
}
/********************** 定时器0中断函数************************/
void time0(void) interrupt 1
{
IR_NEC();
XS();
}
接收源程序+仿真
点击此处下载 ourdev_689713KCBR6N.rar(文件大小:111K) (原文件名:NEC(任意接收引脚,支持长短按).rar)
遥控器源程序
点击此处下载 ourdev_689745J4Z85P.rar(文件大小:94K) (原文件名:遥控器源程序.rar)
/***************************************************************
作品:红外线遥控发射(NEC编码)
单片机:STC89C52RC
晶振:12M
***************************************************************/
//
// 发射引脚(接PNP三极管b极)
// PNP三极管e极接2Ω电阻,c极接红外发射管
#include <REG51.h>
#include "INCMY_SET.h"
#include "INCLCD1602_6IO.h"
sbit IR = P3^6; //发射引脚(接PNP三极管基极)
#define USER_H P2 //用户码高8位
#define USER_L P0 //用户码低8位
uint8c tab[16] = { //操作码
0x12,0x05,0x1e,0x55,
0x01,0x1b,0x03,0x6b,
0x07,0x08,0x09,0x68,
0x22,0xE6,0x33,0xe2};
#define m9 (65536-9000) //9mS
#define m4_5 (65536-4500) //4.5mS
#define m1_6 (65536-1650) //1.65mS
#define m_56 (65536-560) //0.56mS
#define m40 (65536-40000) //40mS
#define m56 (65536-56000) //56mS
#define m2_25 (65536-2250) //2.25mS
void SanZhuan();
uint8 KEY(void);
void ZZ(uint8 x); //NEC编码发送程序
void Z0(uint8 temp); //单帧(8位数据)发送程序
void TT0(bit BT,uint16 x); //38KHz载波发射 + 延时程序
/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈
函数:主程序
┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈*/
void main(void)
{
TMOD = 0x01; //T0 16位工作方式
IR=1; //发射端口常态为高电平
L1602_Init();
L1602_clr();
L1602_xy(0,0);
L1602_ZIFUC("UserCode :0x");
L1602_xy(0,1);
L1602_ZIFUC("Opcode :0x");
while(1)
{
L1602_xy(12,0);
L1602_JZ(USER_H,16,1);
L1602_JZ(USER_L,16,1);
SanZhuan();
}
}
/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈
函数:4×4矩阵键盘
【 线翻转法键值表 】
P1.0 P1.1 P1.2 P1.3 P1.4 P1.5 P1.6 P1.7
│ │ │ │ │ │ │ │
│ │ │ └──7e be de ee
│ │ └─────7d bd dd ed
│ └────────7b bb db eb
└─────────── 77 b7 d7 e7
┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈*/
uint8 KEY(void)
{
uint8 Key = 0;
P1 = 0xf0; //键盘初始:行值=0,列值=1
NOP; //缓冲,待IO端口电位稳定
Key = P1&0xf0; //得到行标志
P1 = 0x0f; //翻转键盘接口输出
NOP;
Key |= (P1&0x0f); //列标志 + 行标志
return Key; //返回键值
}
/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈
函数:散转程序
┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈*/
void SanZhuan()
{
uint8 v;
v = KEY(); //键盘检测
switch(v)
{
case 0x7e:ZZ(tab[0]);break;
case 0xbe:ZZ(tab[1]);break;
case 0xde:ZZ(tab[2]);break;
case 0xee:ZZ(tab[3]);break;
case 0x7d:ZZ(tab[4]);break;
case 0xbd:ZZ(tab[5]);break;
case 0xdd:ZZ(tab[6]);break;
case 0xed:ZZ(tab[7]);break;
case 0x7b:ZZ(tab[8]);break;
case 0xbb:ZZ(tab[9]);break;
case 0xdb:ZZ(tab[10]);break;
case 0xeb:ZZ(tab[11]);break;
case 0x77:ZZ(tab[12]);break;
case 0xb7:ZZ(tab[13]);break;
case 0xd7:ZZ(tab[14]);break;
case 0xe7:ZZ(tab[15]);break;
default:break;
}
v=0;
}
/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈
函数:NEC编码发送程序
┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈*/
void ZZ(uint8 Value)
{
L1602_xy(12,1);
L1602_JZ(Value,16,1); //更新显示
TT0(1,m9); //高电平9mS
TT0(0,m4_5); //低电平4.5mS
/*┈ 发送4帧数据┈*/
Z0(USER_H); //用户码高8位
Z0(USER_L); //用户码低8位
Z0(Value); //操作码
Z0(~Value); //操作码反码
/*┈┈ 结束码 ┈┈*/
TT0(1,m_56);
TT0(0,m40);
/*┈┈ 重复码 ┈┈*/
while(KEY() != 0xFF)
{
TT0(1,m9);
TT0(0,m2_25);
TT0(1,m_56);
TT0(0,m40);
TT0(0,m56);
}
}
/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈
函数:单帧(8位数据)发送程序
入口:temp
┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈*/
void Z0(uint8 temp)
{
uint8 v;
for(v=0;v<8;v++)
{
TT0(1,m_56); //高电平0.65mS
if(temp&0x01) TT0(0,m1_6); //发送最低位
else TT0(0,m_56);
temp >>= 1; //右移一位
}
}
/*┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈
函数:38KHz载波发射 + 延时程序
入口:(是否发射载波,延时约 x (uS))
┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈┈*/
void TT0(bit BT,uint16 x)
{
TH0 = x>>8; //输入定时值
TL0 = x;
TF0=0; //溢出标志位清0
TR0=1; //启动定时器0
if(BT == 0) while(!TF0); //BT=0时,不发射38KHz载波只延时;
else while(1) //BT=1时,发射38KHz脉冲+延时;38KHz载波(低电平)占空比5:26
{
IR = 0;
if(TF0)break;if(TF0)break;
IR = 1;
if(TF0)break;if(TF0)break;
if(TF0)break;if(TF0)break;
if(TF0)break;if(TF0)break;
if(TF0)break;if(TF0)break;
if(TF0)break;if(TF0)break;
}
TR0=0; //关闭定时器0
IR =1; //载波停止后,发射端口常态为高
}
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
-----------------------------------------------------------------------
else while(1) //BT=1时,发射38KHz脉冲+延时;38KHz载波(低电平)占空比约5:26
{
IR = 0;
if(TF0)break;if(TF0)break;
IR = 1;
if(TF0)break;if(TF0)break;
if(TF0)break;if(TF0)break;
if(TF0)break;if(TF0)break;
if(TF0)break;if(TF0)break;
if(TF0)break;if(TF0)break;
}
修改大括号里面的就可以,
频率有些高,降低添加适量的空操作“_nop_();”(注:不要放在大括号两侧)
(原文件名:TP0.jpg)
比如改成:
else while(1) //BT=1时,发射38KHz脉冲+延时;38KHz载波(低电平)占空比约5:26
{
IR = 0;
if(TF0)break;if(TF0)break;
_nop_();
IR = 1;
if(TF0)break;if(TF0)break;
if(TF0)break;if(TF0)break;
if(TF0)break;if(TF0)break;
if(TF0)break;if(TF0)break;
if(TF0)break;if(TF0)break;
}
一周热门 更多>