{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 chchg 的问题《发个刚做的自行车测速、里程计!》','https://www.xiaopingtou.net/q-161469.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
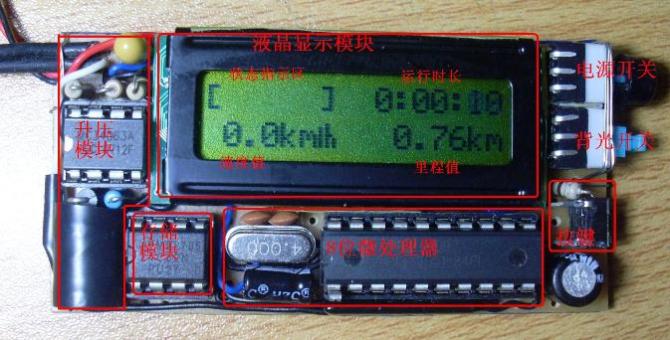
我比较喜欢骑自行车出去走走,以前也做了个自行车测速(里程)计,用4位数码管输出数据的,它的优点是驱动简单,电压范围广,可用3.7V的锂电池直接供电,整个电路结构简单,耗能低,但它的缺点也是显而易见的,数码管在阳光下,无法看清楚,而且只有一组4位数据,不能同时查看速度及里程,不方便。由于购得更小的液晶模块,所以近期用液晶做输出显示器件,做了一个新的里程(速度)计。在阳光下清晰,晚上可用背光,2行共16个字符,并带存储器。有系统运行时间显示,外中断信号与写数据信号、电池低指示。
整体尺寸为65X35X12。加上电池(880mah),厚度要增加3mm,电池接上码表正在测试,已运行14个小时,理论可运行40多小时。
(原文件名:http_imgload.jpg)
// 1602 2*16字符 第一行0x80 第二行0xc0
// 模式(km/h) 12.5kmh | 999.99km
// 24C02存储 0x00-0x03: 99 99 99 99 cm
// 0x2e,0x6b,0x6d,0x06,0x07,0x20,0x3d 0x30-0x39开始是数字0-9
// . , k , m , ┗ ,/h ,black, =
//------头--------------------------------------------------------
//申明
#include "REG2051.H"
#include "INTRINS.H"
#define uchar unsigned char
#define uint unsigned int
//轮周长1.98m及各位值 0.5ms取 1.98*(1/0.5)*1000*10
#define girth 39600
#define girth_h 1
#define girth_l 98
//单片机IO连接
#define LCM0802B_IO P1
sbit LCM0802B_RS = P3^7;
sbit LCM0802B_RW = P3^5;
sbit LCM0802B_EN = P3^4;
sbit KEY = P3^3;
sbit SIGN = P3^2;
sbit AT24C02_SDA = P3^1;
sbit AT24C02_SCL = P3^0;
//液晶驱动函数定义
void LCM_RD_BUSY(void); //读忙信号
void LCM_WR_CMD(uchar); //写操作命令
void LCM_WR_DAT(uchar); //写数据
void LCM_WR(uchar,uchar); //输出一个字符
//存储IC驱动函数定义
void AT24C02_START(void); //开启
void AT24C02_STOP(void); //停止
void AT24C02_CK(void); //时钟
void AT24C02_WR_byte(uchar); //写入单字节
uchar AT24C02_RD_byte(void); //读入单字节
uchar AT24C02_RD(uchar); //从24c02的地址address中读取一个字节数据
void AT24C02_WR(uchar,uchar); //向24c02的address地址中写入一字节数据info
//函数定义
void _init(void); //软硬件初始化
void AT24C02_WRAMD(void); //24c02写入RAM数据
void _nus(uchar); //us延时
void _nms(uchar); //ms延时
void dis_dis(void); //距离数据输出
//变量定义
uchar d_var[4]={0,0,0,0}; //距离的cm值0x00-0x03双数计算
uint timej; //时间周期个数
uint int_tp; //周期个数传递
bit flg_cal; //允许计算
bit sf; //s指示标志
uint sj; //s指示计数
bit sen; //有更新数据
//---- 中断 -----------------------------------------------------
//500us周期定时函数
void T0_SEV(void) interrupt 1 using 1
{
TR0 = 0; ET0 = 0;
TH0 = 0xff; TL0 = 0x5a; //计时初值
timej++; //超过3.5S无中断相应,即判断速度为0,则最低速度2.04km/h
if(timej == 7000){
int_tp = timej; timej = 0;
flg_cal = 1;
}
if(sj>0){ sj--; }//s计数递减
ET0 = 1; TR0 = 1;
}
//外部中断函数
void Int0_SEV(void) interrupt 0 using 0
{
EX0 = 0;
int_tp = timej; timej = 0;
flg_cal = 1;//读取计数周期数
EX0 = 1;
}
//------主体--------------------------------------------------------
//主函数
void main()
{
_init(); //初始化
while(1){
if(!KEY){
_nms(2); //去抖延时
if(!KEY){
uchar key_tp = 200;
EA = 0; timej = 0;
do{ key_tp--; _nms(3); }while(!KEY&&key_tp>0); //长短按计时循环
EA = 1;
if(key_tp==0){
d_var[0] = 0; d_var[1] = 0; d_var[2] = 0; d_var[3] = 0; //清零
_nus(20); dis_dis(); //输出距离
}//长按
//短按长按都要写入数据
sj = 3000; sf = 1;
LCM_WR(0x80,0x06); //0x06
AT24C02_WRAMD(); //24c02写入RAM数据
//等待释放按键
while(!KEY){ while(!KEY); _nms(2); }
}
}//按键功能,长按清除历程信息,短按切换ms与kmh
if(flg_cal){ //清零 输出十分位" 0.0"
if(int_tp == 7000){
LCM_WR(0x81,0x20); LCM_WR(0x82,0x30); LCM_WR(0x84,0x30);
}
else{//正常计算输出
sen = 1;
//速度
if(int_tp>143){
int_tp = girth/int_tp;
int_tp = (int_tp*18)/5; // kmh=3.6*ms
LCM_WR(0x84,(int_tp%10)+0x30); //输出十分位
int_tp = int_tp/10;
LCM_WR(0x82,(int_tp%10)+0x30); //输出个位
if(int_tp<10) LCM_WR(0x81,0x20); //输出十位0时清除
else LCM_WR(0x81,(int_tp/10)+0x30); //输出十位
}//在99.9km/h范围内
//距离 步长1.98m
d_var[3] += girth_l;
if(d_var[3]>99){
d_var[3]-=100; d_var[2]++;
}
d_var[2] += girth_h;
if(d_var[2]>99){
d_var[2]-=100;
if(d_var[1]==99){
d_var[1]=0;
if(d_var[0]==99) d_var[0]=0;
else d_var[0]++;
}
else d_var[1]++;
}
dis_dis(); //输出距离
}
int_tp = 0; flg_cal = 0;//复位
}//输出计算的主要数据
if(sj == 0){
sj = 3000;
if(sen){ //有更新数据才写入
sen = 0;
LCM_WR(0x80,0x06); //0x06
sf = 1;
AT24C02_WRAMD(); //写入存储器
}
}
if(sf && sj<2000){
sf = 0; LCM_WR(0x80,0x20);
} //写存储器闪更新
}//主循环
}
void _init(void)
{
EA = 0; _nus(255); //等待外围设备完成加电
//初始化液晶,显示"?"
LCM_WR_CMD(0x01); //清屏幕0x01
LCM_WR_CMD(0x38); //设置数据线模式0x38 8位 两行 5X7
LCM_WR_CMD(0x0C); //设置显示状态0x0C 整体显示开 光标关 光标闪烁关
LCM_WR_CMD(0x06); //设置输入方式0x06 增量方式 不移位
LCM_WR_CMD(0x80); //设置光标初始位
//LCM_WR(0x80,0x3f);//屏幕初始化输出"?"
//输出 bike mile
LCM_WR(0x80,0x3d); LCM_WR(0x81,0x62); LCM_WR(0x82,0x69); LCM_WR(0x83,0x6b);
LCM_WR(0x84,0x65); LCM_WR(0x85,0x3d); LCM_WR(0x86,0x3d); LCM_WR(0x87,0x3d);//=bike===
LCM_WR(0xc0,0x3d) ;LCM_WR(0xc1,0x3d); LCM_WR(0xc2,0x3d); LCM_WR(0xc3,0x6d);
LCM_WR(0xc4,0x69); LCM_WR(0xc5,0x6c); LCM_WR(0xc6,0x65); LCM_WR(0xc7,0x3d);//===mile=
//初始化液晶自定义字符库
LCM_WR_CMD(0x70); //自定义字符'┗' 在0x06
LCM_WR_DAT(0x00); LCM_WR_DAT(0x00); LCM_WR_DAT(0x00); LCM_WR_DAT(0x10);
LCM_WR_DAT(0x18); LCM_WR_DAT(0x1C); LCM_WR_DAT(0x1E); LCM_WR_DAT(0x00);
LCM_WR_CMD(0x78); //自定义字符'/h' 在0x07
LCM_WR_DAT(0x04); LCM_WR_DAT(0x14); LCM_WR_DAT(0x14); LCM_WR_DAT(0x16);
LCM_WR_DAT(0x15); LCM_WR_DAT(0x15); LCM_WR_DAT(0x15); LCM_WR_DAT(0x00);
//初始化24c02
AT24C02_SCL = 1; _nop_(); AT24C02_SDA = 1; _nop_(); _nms(4);
//读24c02到RAM 初始化 d_var[]
d_var[0] = AT24C02_RD(0x00); d_var[1] = AT24C02_RD(0x01);
d_var[2] = AT24C02_RD(0x02); d_var[3] = AT24C02_RD(0x03);
if(d_var[0]>99 || d_var[1]>99 || d_var[2]>99 || d_var[3]>99){
d_var[0] = 0; d_var[1] = 0; d_var[2] = 0; d_var[3] = 0;//清零
AT24C02_WRAMD();
}//错误数据判断 读取24c02中的距离数据,如果有数据>99,则出错,复位0
KEY = 1; SIGN = 1;
//串口初始化
TMOD = 0x01; //定时中断0允许 方式0 使能off
TH0 = 0xff; TL0 = 0x5a; //500us (65536-166) /256=255 %256=90
ET0 = 1; TR0 = 0;
PX0 = 1; IT0 = 1; EX0 = 0; //外中断0 跳变触 使能off
//变量初始化
timej = 0; int_tp = 0; flg_cal = 0;
sf = 0; sj = 3000; sen = 0;
_nms(255);
//界面初始化
LCM_WR_CMD(0x01); //清屏幕0x01
LCM_WR(0x82,0x30); LCM_WR(0x83,0x2e); LCM_WR(0x84,0x30); //输出" 0.0"
LCM_WR(0x85,0x6b); LCM_WR(0x86,0x6d); LCM_WR(0x87,0x07); //输出" kmh"
LCM_WR(0xc3,0x2e); LCM_WR(0xc6,0x6b); LCM_WR(0xc7,0x6d); //输出" . km"
dis_dis(); _nms(56);
EX0 = 1; TR0 = 1; EA = 1; //开启各种中断 CPU中断使能 TR1 = 1;
}
//---- 硬件应用层驱动 ------------------------------------------------
//距离数据显示
void dis_dis(void)
{
//高位3有数据,并且有两位
if(d_var[0]>9){
LCM_WR(0xc0,(d_var[0]/10)+0x30); LCM_WR(0xc1,(d_var[0]%10)+0x30);
}
else{//高位3只有低位有数据,或没有数据
LCM_WR(0xc0,0x20);//高位3高位没有数据
if(d_var[0]>0) LCM_WR(0xc1,d_var[0]+0x30);//高位3低位有数据
else LCM_WR(0xc1,0x20);//高位3没有数据
}
LCM_WR(0xc2,(d_var[1]/10)+0x30);
LCM_WR(0xc4,(d_var[1]%10)+0x30);
LCM_WR(0xc5,(d_var[2]/10)+0x30);
}
//24c02写入RAM数据
void AT24C02_WRAMD(void)
{
uchar mem_wram;
for(mem_wram=0;mem_wram<4;mem_wram++)
AT24C02_WR(mem_wram,d_var[mem_wram]);
}
//短延时
void _nus(uchar us)
{
for(;us>0;us--)
;
}
//长延时4.6ms
void _nms(uchar ms)
{
for(;ms>0;ms--)
_nus(255);
}
/*----液晶驱动函数定义------------------------------------------------------------
void LCM_WR_CMD(uchar); //写操作命令
void LCM_WR_DAT(uchar); //写数据
void LCM_WR(uchar,uchar); //输出一个字符
void LCM_RD_BUSY(void); //读忙信号
--------------------------------------------------------------------------------*/
//读忙信号
void LCM_RD_BUSY(void)
{
uchar lcm_rdby = 0x00;
LCM0802B_RS = 0; //RS 0
LCM0802B_RW = 1; //RW 1
LCM0802B_EN = 1; //EN 1 读忙信号
LCM0802B_IO = 0xff;
do{ lcm_rdby = LCM0802B_IO; }while(lcm_rdby&0x80); //MSB=0x80
_nop_();
}
//写操作命令
void LCM_WR_CMD(uchar lcm_cmd)
{
LCM_RD_BUSY();
LCM0802B_RS = 0; //RS 0
LCM0802B_RW = 0; //RW 0
LCM0802B_EN = 1; //跳跃,写入数据
LCM0802B_IO = lcm_cmd; _nop_();
LCM0802B_EN = 0; _nop_();
}
//写数据
void LCM_WR_DAT(uchar lcm_wrdat)
{
LCM_RD_BUSY();
LCM0802B_RS = 1; //RS 1
LCM0802B_RW = 0; //RW 0
LCM0802B_EN = 1; //跳跃,写入数据
LCM0802B_IO = lcm_wrdat; _nop_();
LCM0802B_EN = 0; _nop_();
}
//输出一个字符
void LCM_WR(uchar lcm_xy,uchar lcm_dat)
{
EA = 0;
//设置光标位置
LCM_WR_CMD(lcm_xy); //第一行0x80,第二行0xc0
LCM_WR_DAT(lcm_dat);
EA = 1;
}
/*---------------- 24C02驱动 --------------------------------------
void AT24C02_START(void); //开启
void AT24C02_STOP(void); //停止
void AT24C02_CK(void); //时钟
void AT24C02_WR_byte(uchar); //写入单字节
uchar AT24C02_RD_byte(void); //读入单字节
uchar AT24C02_RD(uchar); //从24c02的地址中读取一个字节数据
void AT24C02_WR(uchar,uchar); //向24c02的地址中写入一字节数据
-----------------------------------------------------------------*/
//24c02启动
void AT24C02_START()
{
AT24C02_SDA = 1; _nop_(); AT24C02_SCL = 1; _nop_();
AT24C02_SDA = 0; _nop_(); AT24C02_SCL = 0; _nop_();
}
//24c02停止
void AT24C02_STOP()
{
AT24C02_SDA = 0; _nop_(); AT24C02_SCL = 1; _nop_(); AT24C02_SDA = 1; _nop_();
}
//24c02写入单字节
void AT24C02_WR_byte(uchar mem_wrbt)
{
uchar mem_wrtp,mem_wrbtp;
mem_wrbtp = mem_wrbt;
for (mem_wrtp=8;mem_wrtp>0;mem_wrtp--){
mem_wrbtp = mem_wrbtp<<1;
AT24C02_SCL = 0; _nop_();
AT24C02_SDA = CY; _nop_(); //(bit)(mem_wrbtp&0x80)
AT24C02_SCL = 1; _nop_();
}
AT24C02_SCL = 0; _nop_(); AT24C02_SDA = 1; _nop_();
}
//24c02读入单字节
uchar AT24C02_RD_byte()
{
uchar mem_rdtp,mem_rdbit,mem_rdbt=0;
AT24C02_SCL = 0; _nop_(); AT24C02_SDA = 1;
for(mem_rdtp=8;mem_rdtp>0;mem_rdtp--){
_nop_(); AT24C02_SCL = 1; _nop_();
if (AT24C02_SDA) mem_rdbit = 1;
else mem_rdbit = 0;
mem_rdbt=(mem_rdbt<<1)|mem_rdbit;
AT24C02_SCL = 0;
}
_nop_();
return mem_rdbt;
}
//24c02时钟等待
void AT24C02_CK()
{
uchar mem_ck = 255;
AT24C02_SCL = 1; _nop_();
while((AT24C02_SDA)&&(mem_ck>0)) mem_ck--;
AT24C02_SCL = 0; _nop_();
}
//24c02读入
uchar AT24C02_RD(uchar mem_rdaddr)
{
uchar mem_rd; //在刚启动时使用,故EA不需复位
AT24C02_START();
AT24C02_WR_byte(0xa0); AT24C02_CK();
AT24C02_WR_byte(mem_rdaddr); AT24C02_CK();
AT24C02_START();
AT24C02_WR_byte(0xa1); AT24C02_CK();
mem_rd = AT24C02_RD_byte();
AT24C02_STOP(); _nms(4);
return mem_rd;
}
//24c02写入
void AT24C02_WR(uchar mem_wraddr,uchar mem_wrinfo)
{
EA = 0; AT24C02_START();
AT24C02_WR_byte(0xa0); AT24C02_CK();
AT24C02_WR_byte(mem_wraddr); AT24C02_CK();
AT24C02_WR_byte(mem_wrinfo); AT24C02_CK();
AT24C02_STOP(); EA=1;
_nms(3);
}
//----END---------------------------------------------------------------
整体尺寸为65X35X12。加上电池(880mah),厚度要增加3mm,电池接上码表正在测试,已运行14个小时,理论可运行40多小时。
(原文件名:http_imgload.jpg)
// 1602 2*16字符 第一行0x80 第二行0xc0
// 模式(km/h) 12.5kmh | 999.99km
// 24C02存储 0x00-0x03: 99 99 99 99 cm
// 0x2e,0x6b,0x6d,0x06,0x07,0x20,0x3d 0x30-0x39开始是数字0-9
// . , k , m , ┗ ,/h ,black, =
//------头--------------------------------------------------------
//申明
#include "REG2051.H"
#include "INTRINS.H"
#define uchar unsigned char
#define uint unsigned int
//轮周长1.98m及各位值 0.5ms取 1.98*(1/0.5)*1000*10
#define girth 39600
#define girth_h 1
#define girth_l 98
//单片机IO连接
#define LCM0802B_IO P1
sbit LCM0802B_RS = P3^7;
sbit LCM0802B_RW = P3^5;
sbit LCM0802B_EN = P3^4;
sbit KEY = P3^3;
sbit SIGN = P3^2;
sbit AT24C02_SDA = P3^1;
sbit AT24C02_SCL = P3^0;
//液晶驱动函数定义
void LCM_RD_BUSY(void); //读忙信号
void LCM_WR_CMD(uchar); //写操作命令
void LCM_WR_DAT(uchar); //写数据
void LCM_WR(uchar,uchar); //输出一个字符
//存储IC驱动函数定义
void AT24C02_START(void); //开启
void AT24C02_STOP(void); //停止
void AT24C02_CK(void); //时钟
void AT24C02_WR_byte(uchar); //写入单字节
uchar AT24C02_RD_byte(void); //读入单字节
uchar AT24C02_RD(uchar); //从24c02的地址address中读取一个字节数据
void AT24C02_WR(uchar,uchar); //向24c02的address地址中写入一字节数据info
//函数定义
void _init(void); //软硬件初始化
void AT24C02_WRAMD(void); //24c02写入RAM数据
void _nus(uchar); //us延时
void _nms(uchar); //ms延时
void dis_dis(void); //距离数据输出
//变量定义
uchar d_var[4]={0,0,0,0}; //距离的cm值0x00-0x03双数计算
uint timej; //时间周期个数
uint int_tp; //周期个数传递
bit flg_cal; //允许计算
bit sf; //s指示标志
uint sj; //s指示计数
bit sen; //有更新数据
//---- 中断 -----------------------------------------------------
//500us周期定时函数
void T0_SEV(void) interrupt 1 using 1
{
TR0 = 0; ET0 = 0;
TH0 = 0xff; TL0 = 0x5a; //计时初值
timej++; //超过3.5S无中断相应,即判断速度为0,则最低速度2.04km/h
if(timej == 7000){
int_tp = timej; timej = 0;
flg_cal = 1;
}
if(sj>0){ sj--; }//s计数递减
ET0 = 1; TR0 = 1;
}
//外部中断函数
void Int0_SEV(void) interrupt 0 using 0
{
EX0 = 0;
int_tp = timej; timej = 0;
flg_cal = 1;//读取计数周期数
EX0 = 1;
}
//------主体--------------------------------------------------------
//主函数
void main()
{
_init(); //初始化
while(1){
if(!KEY){
_nms(2); //去抖延时
if(!KEY){
uchar key_tp = 200;
EA = 0; timej = 0;
do{ key_tp--; _nms(3); }while(!KEY&&key_tp>0); //长短按计时循环
EA = 1;
if(key_tp==0){
d_var[0] = 0; d_var[1] = 0; d_var[2] = 0; d_var[3] = 0; //清零
_nus(20); dis_dis(); //输出距离
}//长按
//短按长按都要写入数据
sj = 3000; sf = 1;
LCM_WR(0x80,0x06); //0x06
AT24C02_WRAMD(); //24c02写入RAM数据
//等待释放按键
while(!KEY){ while(!KEY); _nms(2); }
}
}//按键功能,长按清除历程信息,短按切换ms与kmh
if(flg_cal){ //清零 输出十分位" 0.0"
if(int_tp == 7000){
LCM_WR(0x81,0x20); LCM_WR(0x82,0x30); LCM_WR(0x84,0x30);
}
else{//正常计算输出
sen = 1;
//速度
if(int_tp>143){
int_tp = girth/int_tp;
int_tp = (int_tp*18)/5; // kmh=3.6*ms
LCM_WR(0x84,(int_tp%10)+0x30); //输出十分位
int_tp = int_tp/10;
LCM_WR(0x82,(int_tp%10)+0x30); //输出个位
if(int_tp<10) LCM_WR(0x81,0x20); //输出十位0时清除
else LCM_WR(0x81,(int_tp/10)+0x30); //输出十位
}//在99.9km/h范围内
//距离 步长1.98m
d_var[3] += girth_l;
if(d_var[3]>99){
d_var[3]-=100; d_var[2]++;
}
d_var[2] += girth_h;
if(d_var[2]>99){
d_var[2]-=100;
if(d_var[1]==99){
d_var[1]=0;
if(d_var[0]==99) d_var[0]=0;
else d_var[0]++;
}
else d_var[1]++;
}
dis_dis(); //输出距离
}
int_tp = 0; flg_cal = 0;//复位
}//输出计算的主要数据
if(sj == 0){
sj = 3000;
if(sen){ //有更新数据才写入
sen = 0;
LCM_WR(0x80,0x06); //0x06
sf = 1;
AT24C02_WRAMD(); //写入存储器
}
}
if(sf && sj<2000){
sf = 0; LCM_WR(0x80,0x20);
} //写存储器闪更新
}//主循环
}
void _init(void)
{
EA = 0; _nus(255); //等待外围设备完成加电
//初始化液晶,显示"?"
LCM_WR_CMD(0x01); //清屏幕0x01
LCM_WR_CMD(0x38); //设置数据线模式0x38 8位 两行 5X7
LCM_WR_CMD(0x0C); //设置显示状态0x0C 整体显示开 光标关 光标闪烁关
LCM_WR_CMD(0x06); //设置输入方式0x06 增量方式 不移位
LCM_WR_CMD(0x80); //设置光标初始位
//LCM_WR(0x80,0x3f);//屏幕初始化输出"?"
//输出 bike mile
LCM_WR(0x80,0x3d); LCM_WR(0x81,0x62); LCM_WR(0x82,0x69); LCM_WR(0x83,0x6b);
LCM_WR(0x84,0x65); LCM_WR(0x85,0x3d); LCM_WR(0x86,0x3d); LCM_WR(0x87,0x3d);//=bike===
LCM_WR(0xc0,0x3d) ;LCM_WR(0xc1,0x3d); LCM_WR(0xc2,0x3d); LCM_WR(0xc3,0x6d);
LCM_WR(0xc4,0x69); LCM_WR(0xc5,0x6c); LCM_WR(0xc6,0x65); LCM_WR(0xc7,0x3d);//===mile=
//初始化液晶自定义字符库
LCM_WR_CMD(0x70); //自定义字符'┗' 在0x06
LCM_WR_DAT(0x00); LCM_WR_DAT(0x00); LCM_WR_DAT(0x00); LCM_WR_DAT(0x10);
LCM_WR_DAT(0x18); LCM_WR_DAT(0x1C); LCM_WR_DAT(0x1E); LCM_WR_DAT(0x00);
LCM_WR_CMD(0x78); //自定义字符'/h' 在0x07
LCM_WR_DAT(0x04); LCM_WR_DAT(0x14); LCM_WR_DAT(0x14); LCM_WR_DAT(0x16);
LCM_WR_DAT(0x15); LCM_WR_DAT(0x15); LCM_WR_DAT(0x15); LCM_WR_DAT(0x00);
//初始化24c02
AT24C02_SCL = 1; _nop_(); AT24C02_SDA = 1; _nop_(); _nms(4);
//读24c02到RAM 初始化 d_var[]
d_var[0] = AT24C02_RD(0x00); d_var[1] = AT24C02_RD(0x01);
d_var[2] = AT24C02_RD(0x02); d_var[3] = AT24C02_RD(0x03);
if(d_var[0]>99 || d_var[1]>99 || d_var[2]>99 || d_var[3]>99){
d_var[0] = 0; d_var[1] = 0; d_var[2] = 0; d_var[3] = 0;//清零
AT24C02_WRAMD();
}//错误数据判断 读取24c02中的距离数据,如果有数据>99,则出错,复位0
KEY = 1; SIGN = 1;
//串口初始化
TMOD = 0x01; //定时中断0允许 方式0 使能off
TH0 = 0xff; TL0 = 0x5a; //500us (65536-166) /256=255 %256=90
ET0 = 1; TR0 = 0;
PX0 = 1; IT0 = 1; EX0 = 0; //外中断0 跳变触 使能off
//变量初始化
timej = 0; int_tp = 0; flg_cal = 0;
sf = 0; sj = 3000; sen = 0;
_nms(255);
//界面初始化
LCM_WR_CMD(0x01); //清屏幕0x01
LCM_WR(0x82,0x30); LCM_WR(0x83,0x2e); LCM_WR(0x84,0x30); //输出" 0.0"
LCM_WR(0x85,0x6b); LCM_WR(0x86,0x6d); LCM_WR(0x87,0x07); //输出" kmh"
LCM_WR(0xc3,0x2e); LCM_WR(0xc6,0x6b); LCM_WR(0xc7,0x6d); //输出" . km"
dis_dis(); _nms(56);
EX0 = 1; TR0 = 1; EA = 1; //开启各种中断 CPU中断使能 TR1 = 1;
}
//---- 硬件应用层驱动 ------------------------------------------------
//距离数据显示
void dis_dis(void)
{
//高位3有数据,并且有两位
if(d_var[0]>9){
LCM_WR(0xc0,(d_var[0]/10)+0x30); LCM_WR(0xc1,(d_var[0]%10)+0x30);
}
else{//高位3只有低位有数据,或没有数据
LCM_WR(0xc0,0x20);//高位3高位没有数据
if(d_var[0]>0) LCM_WR(0xc1,d_var[0]+0x30);//高位3低位有数据
else LCM_WR(0xc1,0x20);//高位3没有数据
}
LCM_WR(0xc2,(d_var[1]/10)+0x30);
LCM_WR(0xc4,(d_var[1]%10)+0x30);
LCM_WR(0xc5,(d_var[2]/10)+0x30);
}
//24c02写入RAM数据
void AT24C02_WRAMD(void)
{
uchar mem_wram;
for(mem_wram=0;mem_wram<4;mem_wram++)
AT24C02_WR(mem_wram,d_var[mem_wram]);
}
//短延时
void _nus(uchar us)
{
for(;us>0;us--)
;
}
//长延时4.6ms
void _nms(uchar ms)
{
for(;ms>0;ms--)
_nus(255);
}
/*----液晶驱动函数定义------------------------------------------------------------
void LCM_WR_CMD(uchar); //写操作命令
void LCM_WR_DAT(uchar); //写数据
void LCM_WR(uchar,uchar); //输出一个字符
void LCM_RD_BUSY(void); //读忙信号
--------------------------------------------------------------------------------*/
//读忙信号
void LCM_RD_BUSY(void)
{
uchar lcm_rdby = 0x00;
LCM0802B_RS = 0; //RS 0
LCM0802B_RW = 1; //RW 1
LCM0802B_EN = 1; //EN 1 读忙信号
LCM0802B_IO = 0xff;
do{ lcm_rdby = LCM0802B_IO; }while(lcm_rdby&0x80); //MSB=0x80
_nop_();
}
//写操作命令
void LCM_WR_CMD(uchar lcm_cmd)
{
LCM_RD_BUSY();
LCM0802B_RS = 0; //RS 0
LCM0802B_RW = 0; //RW 0
LCM0802B_EN = 1; //跳跃,写入数据
LCM0802B_IO = lcm_cmd; _nop_();
LCM0802B_EN = 0; _nop_();
}
//写数据
void LCM_WR_DAT(uchar lcm_wrdat)
{
LCM_RD_BUSY();
LCM0802B_RS = 1; //RS 1
LCM0802B_RW = 0; //RW 0
LCM0802B_EN = 1; //跳跃,写入数据
LCM0802B_IO = lcm_wrdat; _nop_();
LCM0802B_EN = 0; _nop_();
}
//输出一个字符
void LCM_WR(uchar lcm_xy,uchar lcm_dat)
{
EA = 0;
//设置光标位置
LCM_WR_CMD(lcm_xy); //第一行0x80,第二行0xc0
LCM_WR_DAT(lcm_dat);
EA = 1;
}
/*---------------- 24C02驱动 --------------------------------------
void AT24C02_START(void); //开启
void AT24C02_STOP(void); //停止
void AT24C02_CK(void); //时钟
void AT24C02_WR_byte(uchar); //写入单字节
uchar AT24C02_RD_byte(void); //读入单字节
uchar AT24C02_RD(uchar); //从24c02的地址中读取一个字节数据
void AT24C02_WR(uchar,uchar); //向24c02的地址中写入一字节数据
-----------------------------------------------------------------*/
//24c02启动
void AT24C02_START()
{
AT24C02_SDA = 1; _nop_(); AT24C02_SCL = 1; _nop_();
AT24C02_SDA = 0; _nop_(); AT24C02_SCL = 0; _nop_();
}
//24c02停止
void AT24C02_STOP()
{
AT24C02_SDA = 0; _nop_(); AT24C02_SCL = 1; _nop_(); AT24C02_SDA = 1; _nop_();
}
//24c02写入单字节
void AT24C02_WR_byte(uchar mem_wrbt)
{
uchar mem_wrtp,mem_wrbtp;
mem_wrbtp = mem_wrbt;
for (mem_wrtp=8;mem_wrtp>0;mem_wrtp--){
mem_wrbtp = mem_wrbtp<<1;
AT24C02_SCL = 0; _nop_();
AT24C02_SDA = CY; _nop_(); //(bit)(mem_wrbtp&0x80)
AT24C02_SCL = 1; _nop_();
}
AT24C02_SCL = 0; _nop_(); AT24C02_SDA = 1; _nop_();
}
//24c02读入单字节
uchar AT24C02_RD_byte()
{
uchar mem_rdtp,mem_rdbit,mem_rdbt=0;
AT24C02_SCL = 0; _nop_(); AT24C02_SDA = 1;
for(mem_rdtp=8;mem_rdtp>0;mem_rdtp--){
_nop_(); AT24C02_SCL = 1; _nop_();
if (AT24C02_SDA) mem_rdbit = 1;
else mem_rdbit = 0;
mem_rdbt=(mem_rdbt<<1)|mem_rdbit;
AT24C02_SCL = 0;
}
_nop_();
return mem_rdbt;
}
//24c02时钟等待
void AT24C02_CK()
{
uchar mem_ck = 255;
AT24C02_SCL = 1; _nop_();
while((AT24C02_SDA)&&(mem_ck>0)) mem_ck--;
AT24C02_SCL = 0; _nop_();
}
//24c02读入
uchar AT24C02_RD(uchar mem_rdaddr)
{
uchar mem_rd; //在刚启动时使用,故EA不需复位
AT24C02_START();
AT24C02_WR_byte(0xa0); AT24C02_CK();
AT24C02_WR_byte(mem_rdaddr); AT24C02_CK();
AT24C02_START();
AT24C02_WR_byte(0xa1); AT24C02_CK();
mem_rd = AT24C02_RD_byte();
AT24C02_STOP(); _nms(4);
return mem_rd;
}
//24c02写入
void AT24C02_WR(uchar mem_wraddr,uchar mem_wrinfo)
{
EA = 0; AT24C02_START();
AT24C02_WR_byte(0xa0); AT24C02_CK();
AT24C02_WR_byte(mem_wraddr); AT24C02_CK();
AT24C02_WR_byte(mem_wrinfo); AT24C02_CK();
AT24C02_STOP(); EA=1;
_nms(3);
}
//----END---------------------------------------------------------------
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
嘎嘎,玩的就是这种乐趣啊! 我手上有几个自行车码表,都被我拆了!
一周热门 更多>