{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 ms80c51 的问题《有用过mlx90614ESF-BAA 非接触式红外温度传感器的吗?帮我看看我的程序跟电路,为什么没》','https://www.xiaopingtou.net/q-162178.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
#include<at89x51.h>
#include<intrins.h>
#define uint unsigned int
#define uchar unsigned char
#define Nack_number 10
//mlx90614端口定义
sbit SCK=P1^0; //时钟线
sbit SDA=P1^1; //数据线
sbit LED3 = P0^5; //数码管位驱动
sbit LED2 = P0^6; //数码管位驱动
sbit LED1 = P0^7; //数码管位驱动
uchar convert[10]={0x05,0xDD,0x46,0x54,0x9C,0x34,0x24,0x5D,0x04,0x14},xm0,xm1,xm2,buffer[3];//0~9段码
//************数据定义****************************************************
bdata uchar flag1; //可位寻址数据
sbit bit_out=flag1^7;
sbit bit_in=flag1^0;
uchar tempH,tempL,err;
//************************** LCD1602 ***********************************
//向LCD写入命令或数据*****************************************************
#define LCD_COMMAND 0 //命令
#define LCD_DATA 1 // 数据
#define LCD_CLEAR_SCREEN 0x01 // 清屏
#define LCD_HOMING 0x02 // 光标返回原点
//设置显示模式******* 0x08+ *********************************************
#define LCD_SHOW 0x04 //显示开
#define LCD_HIDE 0x00 //显示关
#define LCD_CURSOR 0x02 //显示光标
#define LCD_NO_CURSOR 0x00 //无光标
#define LCD_FLASH 0x01 //光标闪动
#define LCD_NO_FLASH 0x00 //光标不闪动
//设置输入模式********** 0x04+ ********************************************
#define LCD_AC_UP 0x02 //光标右移 AC+
#define LCD_AC_DOWN 0x00 //默认 光标左移 AC-
#define LCD_MOVE 0x01 //画面可平移
#define LCD_NO_MOVE 0x00 //默认 画面不移动
//************************** mlx90614 ***********************************
//command mode 命令模式
#define RamAccess 0x00 //对RAM操作
#define EepomAccess 0x20 //对EEPRAM操作
#define Mode 0x60 //进入命令模式
#define ExitMode 0x61 //退出命令模式
#define ReadFlag 0xf0 //读标志
#define EnterSleep 0xff //进入睡眠模式
//ram address read only RAM地址(只读)
#define AbmientTempAddr 0x03 //周围温度
#define IR1Addr 0x04
#define IR2Addr 0x05
#define LineAbmientTempAddr 0x06 //环境温度
/*0x0000 0x4074 16500 0.01/单元
-40 125*/
#define LineObj1TempAddr 0x07 //目标温度,红外温度
/*0x27ad-0x7fff 0x3559 22610 0.02/单元
-70.01-382.19 0.01 452.2*/
#define LineObj2TempAddr 0x08
//eepom address EEPROM地址
#define TObjMaxAddr 0x00 //测量范围上限设定
#define TObjMinAddr 0x01 //测量范围下限设定
#define PWMCtrlAddr 0x02 //PWM设定
#define TaRangeAddr 0x03 //环境温度设定
#define KeAddr 0x04 //频率修正系数
#define ConfigAddr 0x05 //配置寄存器
#define SMbusAddr 0x0e //器件地址设定
#define Reserverd1Addr 0x0f //保留
#define Reserverd2Addr 0x19 //保留
#define ID1Addr 0x1c //ID地址1
#define ID2Addr 0x1d //ID地址2
#define ID3Addr 0x1e //ID地址3
#define ID4Addr 0x1f //ID地址4
//************函数声明*****************************************************
void start(); //MLX90614发起始位子程序
void stop(); //MLX90614发结束位子程序
uchar ReadByte(void); //MLX90614接收字节子程序
void send_bit(void); //MLX90614发送位子程序
void SendByte(uchar number); //MLX90614接收字节子程序
void read_bit(void); //MLX90614接收位子程序
void delay(uint N); //延时程序
uint readtemp(void); //读温度数据
void init1602(void); //LCD初始化子程序
void busy(void); //LCD判断忙子程序
void cmd_wrt(uchar cmd); //LCD写命令子程序
void dat_wrt(uchar dat); //LCD写数据子程序
void display(uint Tem); //显示子程序
void Print(uchar *str); //字符串显示程序
void delayscan(i);
void timeToBuffer()
{ //
buffer[0]=convert[xm2];
buffer[1]=convert[xm1];
buffer[2]=convert[xm0]; //
}
void delayscan(i)
{
while(--i);
}
void scanLED() //显示功能模块
{
P2=buffer[0];
LED1=0;
delayscan(1);
LED1=1;
delayscan(50);
P2=buffer[1];
LED2=0;
delayscan(1);
LED2=1;
delayscan(50);
P2=buffer[2];
LED3=0;
delayscan(1);
LED3=1;
delayscan(50);
}
//*************主函数*******************************************
void main()
{
uint Tem,yy; //温度变量
SCK=1;
SDA=1;
delay(4);
SCK=0;
delay(1000);
SCK=1;
while(1)
{
Tem=readtemp(); //读取温度
display(Tem); //显示温度
timeToBuffer();
for (yy=0;yy<1000;yy++)
scanLED(); //延时
}
}
//*********输入转换并显示*********
void display(uint Tem)
{
uint T,a,b;
T=60000;//Tem*2;
if(T>=27315) //温度为正
{
T=T-27315; //
a=T/100; //温度整数
b=T-a*100; //温度小数
xm2=a%100/10; //显示温度十位
xm1=a%10; //显示温度个位
xm0=b/10; //显示温度小数点后第1位数
}
}
//************************************
void start(void) //停止条件是 SCK=1时,SDA由1到0
{
SDA=1;
delay(4);
SCK=1;
delay(4);
SDA=0;
delay(4);
SCK=0;
delay(4);
}
//------------------------------
void stop(void) //停止条件是 SCK=1时,SDA由0到1
{
SCK=0;
delay(4);
SDA=0;
delay(4);
SCK=1;
delay(4);
SDA=1;
}
//---------发送一个字节---------
void SendByte(uchar number)
{
uchar i,n,dat;
n=Nack_number; //可以重发次数
Send_again:
dat=number;
for(i=0;i<8;i++) //8位依次发送
{
if(dat&0x80) //取最高位
{
bit_out=1; //发1
}
else
{
bit_out=0; //发0
}
send_bit(); //发送一个位
dat=dat<<1; //左移一位
}
read_bit(); //接收1位 应答信号
if(bit_in==1) //无应答时重发
{
stop();
if(n!=0)
{
n--; //可以重发Nack_number=10次
goto Repeat; //重发
}
else
{
goto exit; //退出
}
}
else
{
goto exit;
}
Repeat:
start(); //重新开始
goto Send_again; //重发
exit: ; //退出
}
//-----------发送一个位---------
void send_bit(void)
{
if(bit_out==1)
{
SDA=1; //发1
}
else
{
SDA=0; //发0
}
_nop_();
SCK=1; //上升沿
delay(4);delay(4);
SCK=0;
delay(4);delay(4);
}
//----------接收一个字节--------
uchar ReadByte(void)
{
uchar i,dat;
dat=0; //初值为0
for(i=0;i<8;i++)
{
dat=dat<<1; //左移
read_bit(); //接收一位
if(bit_in==1)
{
dat=dat+1; //为1时对应位加1
}
}
SDA=0; //发送应答信号0
send_bit();
return dat; //带回接收数据
}
//----------接收一个位----------
void read_bit(void)
{
SDA=1; //数据端先置1
bit_in=1;
SCK=1; //上升沿
delay(4);delay(4);
bit_in=SDA; //读数据
_nop_();
SCK=0;
delay(4);delay(4);
}
//------------------------------
uint readtemp(void)
{
SCK=0;
start(); //开始条件
SendByte(0x00); //发送从地址00
SendByte(0x07); //发送命令
start(); //开始条件
SendByte(0x01); //读从地址00
bit_out=0;
tempL=ReadByte(); //读数据低字节
bit_out=0;
tempH=ReadByte(); //读数据高字节
bit_out=1;
err=ReadByte(); //读错误信息码
stop(); //停止条件
return(tempH*256+tempL);
}
//------------延时--------------
void delay(uint n)
{
uint j;
for(j=0;j<n;j++)
{
_nop_();
}
}
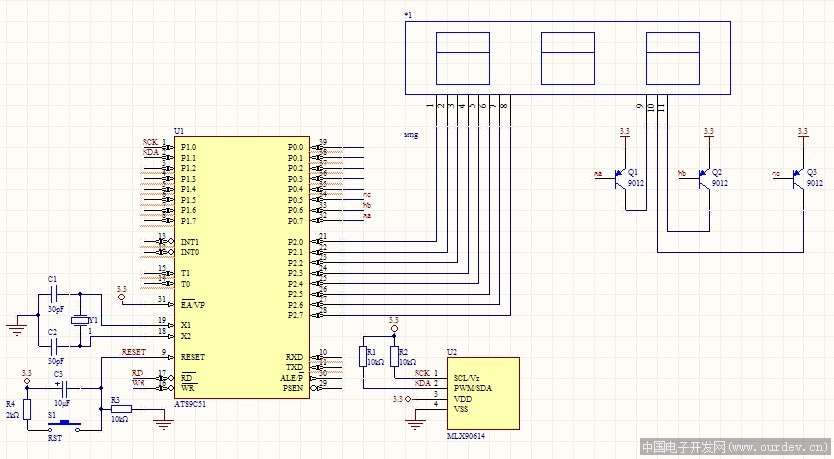
(原文件名:wdcj.jpg)
板子是用洞洞板做的
#include<intrins.h>
#define uint unsigned int
#define uchar unsigned char
#define Nack_number 10
//mlx90614端口定义
sbit SCK=P1^0; //时钟线
sbit SDA=P1^1; //数据线
sbit LED3 = P0^5; //数码管位驱动
sbit LED2 = P0^6; //数码管位驱动
sbit LED1 = P0^7; //数码管位驱动
uchar convert[10]={0x05,0xDD,0x46,0x54,0x9C,0x34,0x24,0x5D,0x04,0x14},xm0,xm1,xm2,buffer[3];//0~9段码
//************数据定义****************************************************
bdata uchar flag1; //可位寻址数据
sbit bit_out=flag1^7;
sbit bit_in=flag1^0;
uchar tempH,tempL,err;
//************************** LCD1602 ***********************************
//向LCD写入命令或数据*****************************************************
#define LCD_COMMAND 0 //命令
#define LCD_DATA 1 // 数据
#define LCD_CLEAR_SCREEN 0x01 // 清屏
#define LCD_HOMING 0x02 // 光标返回原点
//设置显示模式******* 0x08+ *********************************************
#define LCD_SHOW 0x04 //显示开
#define LCD_HIDE 0x00 //显示关
#define LCD_CURSOR 0x02 //显示光标
#define LCD_NO_CURSOR 0x00 //无光标
#define LCD_FLASH 0x01 //光标闪动
#define LCD_NO_FLASH 0x00 //光标不闪动
//设置输入模式********** 0x04+ ********************************************
#define LCD_AC_UP 0x02 //光标右移 AC+
#define LCD_AC_DOWN 0x00 //默认 光标左移 AC-
#define LCD_MOVE 0x01 //画面可平移
#define LCD_NO_MOVE 0x00 //默认 画面不移动
//************************** mlx90614 ***********************************
//command mode 命令模式
#define RamAccess 0x00 //对RAM操作
#define EepomAccess 0x20 //对EEPRAM操作
#define Mode 0x60 //进入命令模式
#define ExitMode 0x61 //退出命令模式
#define ReadFlag 0xf0 //读标志
#define EnterSleep 0xff //进入睡眠模式
//ram address read only RAM地址(只读)
#define AbmientTempAddr 0x03 //周围温度
#define IR1Addr 0x04
#define IR2Addr 0x05
#define LineAbmientTempAddr 0x06 //环境温度
/*0x0000 0x4074 16500 0.01/单元
-40 125*/
#define LineObj1TempAddr 0x07 //目标温度,红外温度
/*0x27ad-0x7fff 0x3559 22610 0.02/单元
-70.01-382.19 0.01 452.2*/
#define LineObj2TempAddr 0x08
//eepom address EEPROM地址
#define TObjMaxAddr 0x00 //测量范围上限设定
#define TObjMinAddr 0x01 //测量范围下限设定
#define PWMCtrlAddr 0x02 //PWM设定
#define TaRangeAddr 0x03 //环境温度设定
#define KeAddr 0x04 //频率修正系数
#define ConfigAddr 0x05 //配置寄存器
#define SMbusAddr 0x0e //器件地址设定
#define Reserverd1Addr 0x0f //保留
#define Reserverd2Addr 0x19 //保留
#define ID1Addr 0x1c //ID地址1
#define ID2Addr 0x1d //ID地址2
#define ID3Addr 0x1e //ID地址3
#define ID4Addr 0x1f //ID地址4
//************函数声明*****************************************************
void start(); //MLX90614发起始位子程序
void stop(); //MLX90614发结束位子程序
uchar ReadByte(void); //MLX90614接收字节子程序
void send_bit(void); //MLX90614发送位子程序
void SendByte(uchar number); //MLX90614接收字节子程序
void read_bit(void); //MLX90614接收位子程序
void delay(uint N); //延时程序
uint readtemp(void); //读温度数据
void init1602(void); //LCD初始化子程序
void busy(void); //LCD判断忙子程序
void cmd_wrt(uchar cmd); //LCD写命令子程序
void dat_wrt(uchar dat); //LCD写数据子程序
void display(uint Tem); //显示子程序
void Print(uchar *str); //字符串显示程序
void delayscan(i);
void timeToBuffer()
{ //
buffer[0]=convert[xm2];
buffer[1]=convert[xm1];
buffer[2]=convert[xm0]; //
}
void delayscan(i)
{
while(--i);
}
void scanLED() //显示功能模块
{
P2=buffer[0];
LED1=0;
delayscan(1);
LED1=1;
delayscan(50);
P2=buffer[1];
LED2=0;
delayscan(1);
LED2=1;
delayscan(50);
P2=buffer[2];
LED3=0;
delayscan(1);
LED3=1;
delayscan(50);
}
//*************主函数*******************************************
void main()
{
uint Tem,yy; //温度变量
SCK=1;
SDA=1;
delay(4);
SCK=0;
delay(1000);
SCK=1;
while(1)
{
Tem=readtemp(); //读取温度
display(Tem); //显示温度
timeToBuffer();
for (yy=0;yy<1000;yy++)
scanLED(); //延时
}
}
//*********输入转换并显示*********
void display(uint Tem)
{
uint T,a,b;
T=60000;//Tem*2;
if(T>=27315) //温度为正
{
T=T-27315; //
a=T/100; //温度整数
b=T-a*100; //温度小数
xm2=a%100/10; //显示温度十位
xm1=a%10; //显示温度个位
xm0=b/10; //显示温度小数点后第1位数
}
}
//************************************
void start(void) //停止条件是 SCK=1时,SDA由1到0
{
SDA=1;
delay(4);
SCK=1;
delay(4);
SDA=0;
delay(4);
SCK=0;
delay(4);
}
//------------------------------
void stop(void) //停止条件是 SCK=1时,SDA由0到1
{
SCK=0;
delay(4);
SDA=0;
delay(4);
SCK=1;
delay(4);
SDA=1;
}
//---------发送一个字节---------
void SendByte(uchar number)
{
uchar i,n,dat;
n=Nack_number; //可以重发次数
Send_again:
dat=number;
for(i=0;i<8;i++) //8位依次发送
{
if(dat&0x80) //取最高位
{
bit_out=1; //发1
}
else
{
bit_out=0; //发0
}
send_bit(); //发送一个位
dat=dat<<1; //左移一位
}
read_bit(); //接收1位 应答信号
if(bit_in==1) //无应答时重发
{
stop();
if(n!=0)
{
n--; //可以重发Nack_number=10次
goto Repeat; //重发
}
else
{
goto exit; //退出
}
}
else
{
goto exit;
}
Repeat:
start(); //重新开始
goto Send_again; //重发
exit: ; //退出
}
//-----------发送一个位---------
void send_bit(void)
{
if(bit_out==1)
{
SDA=1; //发1
}
else
{
SDA=0; //发0
}
_nop_();
SCK=1; //上升沿
delay(4);delay(4);
SCK=0;
delay(4);delay(4);
}
//----------接收一个字节--------
uchar ReadByte(void)
{
uchar i,dat;
dat=0; //初值为0
for(i=0;i<8;i++)
{
dat=dat<<1; //左移
read_bit(); //接收一位
if(bit_in==1)
{
dat=dat+1; //为1时对应位加1
}
}
SDA=0; //发送应答信号0
send_bit();
return dat; //带回接收数据
}
//----------接收一个位----------
void read_bit(void)
{
SDA=1; //数据端先置1
bit_in=1;
SCK=1; //上升沿
delay(4);delay(4);
bit_in=SDA; //读数据
_nop_();
SCK=0;
delay(4);delay(4);
}
//------------------------------
uint readtemp(void)
{
SCK=0;
start(); //开始条件
SendByte(0x00); //发送从地址00
SendByte(0x07); //发送命令
start(); //开始条件
SendByte(0x01); //读从地址00
bit_out=0;
tempL=ReadByte(); //读数据低字节
bit_out=0;
tempH=ReadByte(); //读数据高字节
bit_out=1;
err=ReadByte(); //读错误信息码
stop(); //停止条件
return(tempH*256+tempL);
}
//------------延时--------------
void delay(uint n)
{
uint j;
for(j=0;j<n;j++)
{
_nop_();
}
}
(原文件名:wdcj.jpg)
板子是用洞洞板做的
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
是不是通信速度太快了?
-----------------------------------------------------------------------
谢谢 我下午调慢试试
一周热门 更多>