{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 liuyang8023 的问题《74HC595程序应用(原理图)》','https://www.xiaopingtou.net/q-164707.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
 360软件小助手截图20130515125812.jpg (167.69 KB, 下载次数: 0)
下载附件
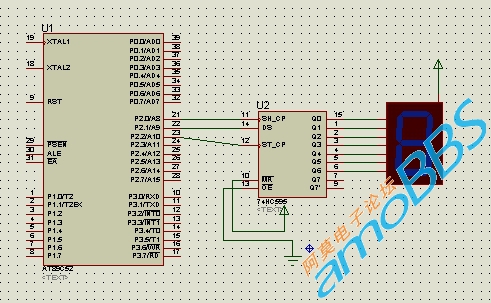
仿真
2013-5-15 13:16 上传
360软件小助手截图20130515125812.jpg (167.69 KB, 下载次数: 0)
下载附件
仿真
2013-5-15 13:16 上传
#include<reg52.h>
//#include<intrins.h> /*_nop_()在<intrins.h>里*/
#define uchar unsigned char
#define uint unsigned int
sbit shcp=P2^0;
sbit ds=P2^1;
sbit stcp=P2^2;
uchar temp;
uchar code duan[]=
{0xc0,0xf9,0xa4,0xb0,0x99,
0x92,0x82,0xf8,0x80,0x10};
/*延时*/
void delay(uint z)
{
uint x,y;
for(x=z;x>0;x--)
for(y=100;y>0;y--);
}
/*数据输入 */
void input(uchar temp)
{
uchar i;
for(i=0;i<8;i++) /*只是表明向左移动 移动过次*/
{
temp<<=1;
ds=CY;
shcp=0;
shcp=1;
//_nop_();
//_nop_();
}
}
/*数据输出*/
void output()
{
stcp=0;
//_nop_();
stcp=1;
// _nop_();
//stcp=0;
}
/*主函数*/
void main(void)
{
uchar i;
while(1)
{
for(i=0;i<10;i++)
{
temp=duan;
input(temp);
output();
delay(300);
}
}
}
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
一周热门 更多>