专家
公告
财富商城
电子网
旗下网站
首页
问题库
专栏
标签库
话题
专家
NEW
门户
发布
提问题
发文章
51单片机
AT98S52控制驱动二相步进电动机程序,求!!!
2020-02-04 09:33
发布
×
打开微信“扫一扫”,打开网页后点击屏幕右上角分享按钮
站内问答
/
51单片机
8885
3
3
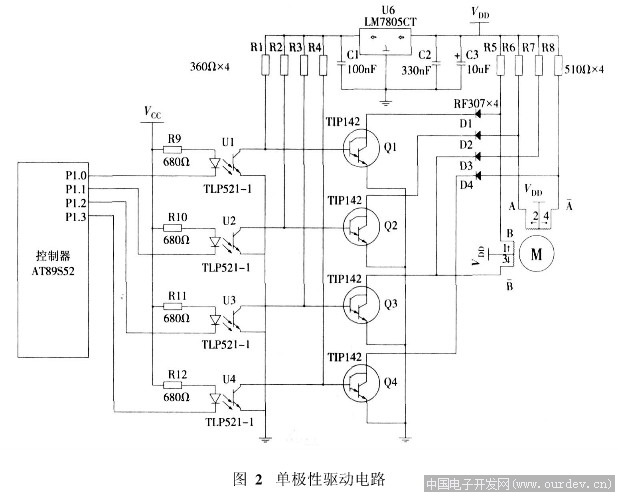
求90GBY4502型步进电动机驱动电路的程序!控制器是AT98S52,原理图上传如下图!各位大神,谢啦
(原文件名:GBY17.jpg)
友情提示:
此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
3条回答
kiracl
2020-02-04 14:00
来个最简单,能转的,能说明问题的,然后你自己再搞搞:
#include <reg52.h>
unsigned char code F_Rotation[4]={0x02,0x04,0x08,0x10}; //正转表格,换算成二进制 0000 0010,0000 0100,0000 1000,0001 0000
unsigned char code B_Rotation[4]={0x10,0x08,0x04,0x02}; //反转表格,换算成二进制 0001 0000,0000 1000,0000 0100,0000 0010
//这是四拍的,你也可以弄个八拍,差不多意思,unsigned char step[8]={0x80,0xc0,0x40,0x60,0x20,0x30,0x10,0x90}
//反正是在你的驱动端口上产生一个完整的驱动序列就行了
/******************************************************************/
/* 延时函数 */
/******************************************************************/
void Delay(unsigned int i)//延时
{
while(--i);
}
/******************************************************************/
/* 主函数 */
/******************************************************************/
main()
{
unsigned char i;
while(1)
{
for(i=0;i<4;i++) //4相
{
P1=F_Rotation
; //输出对应的相 可以自行换成反转表格
Delay(500); //改变这个参数可以调整电机转速 ,数字越小,转速越大
}
}
}
//关于步进电机变速曲线的讨论,通常就是Delay这块的算法讨论了。
加载中...
查看其它3个回答
一周热门
更多
>
相关问题
【东软载波ESF0654 PDS开发板活动】开箱
1 个回答
东软载波ESF0654 PDS开发板外部中断
1 个回答
东软载波ESF0654 PDS开发板高级控制定时器AD16C4T
1 个回答
用串口调试助手为什么只能在hex模式接收发送而在文本模式不行
9 个回答
触摸芯片SC02B/SC04B在地砖灯的设计方案
1 个回答
相关文章
51单片机与蓝牙模块连接
0个评论
51单片机的硬件结构
0个评论
基于51单片机的无线遥控器制作
0个评论
51单片机 AD转换
0个评论
51单片机数码管递增显示
0个评论
如何实现对单片机寄存器的访问
0个评论
基于51单片机的指纹密码锁
0个评论
×
关闭
采纳回答
向帮助了您的知道网友说句感谢的话吧!
非常感谢!
确 认
×
关闭
编辑标签
最多设置5个标签!
51单片机
保存
关闭
×
关闭
举报内容
检举类型
检举内容
检举用户
检举原因
广告推广
恶意灌水
回答内容与提问无关
抄袭答案
其他
检举说明(必填)
提交
关闭
×
打开微信“扫一扫”,打开网页后点击屏幕右上角分享按钮
×
付费偷看金额在0.1-10元之间
确定
×
关闭
您已邀请
0
人回答
查看邀请
擅长该话题的人
回答过该话题的人
我关注的人
{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 shl19890206 的问题《AT98S52控制驱动二相步进电动机程序,求!!!》','https://www.xiaopingtou.net/q-168157.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
#include <reg52.h>
unsigned char code F_Rotation[4]={0x02,0x04,0x08,0x10}; //正转表格,换算成二进制 0000 0010,0000 0100,0000 1000,0001 0000
unsigned char code B_Rotation[4]={0x10,0x08,0x04,0x02}; //反转表格,换算成二进制 0001 0000,0000 1000,0000 0100,0000 0010
//这是四拍的,你也可以弄个八拍,差不多意思,unsigned char step[8]={0x80,0xc0,0x40,0x60,0x20,0x30,0x10,0x90}
//反正是在你的驱动端口上产生一个完整的驱动序列就行了
/******************************************************************/
/* 延时函数 */
/******************************************************************/
void Delay(unsigned int i)//延时
{
while(--i);
}
/******************************************************************/
/* 主函数 */
/******************************************************************/
main()
{
unsigned char i;
while(1)
{
for(i=0;i<4;i++) //4相
{
P1=F_Rotation; //输出对应的相 可以自行换成反转表格
Delay(500); //改变这个参数可以调整电机转速 ,数字越小,转速越大
}
}
}
//关于步进电机变速曲线的讨论,通常就是Delay这块的算法讨论了。
一周热门 更多>