{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 role_2099 的问题《PIC16F690做电容式触摸按键,转载》','https://www.xiaopingtou.net/q-169569.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
前几天在一个PIC论坛看到一篇关于PIC触摸按键的帖子,过来搜索了一下,本站还没有PIC触摸按键的帖子,所以转载过来了
-----------以下为转载内容--------------
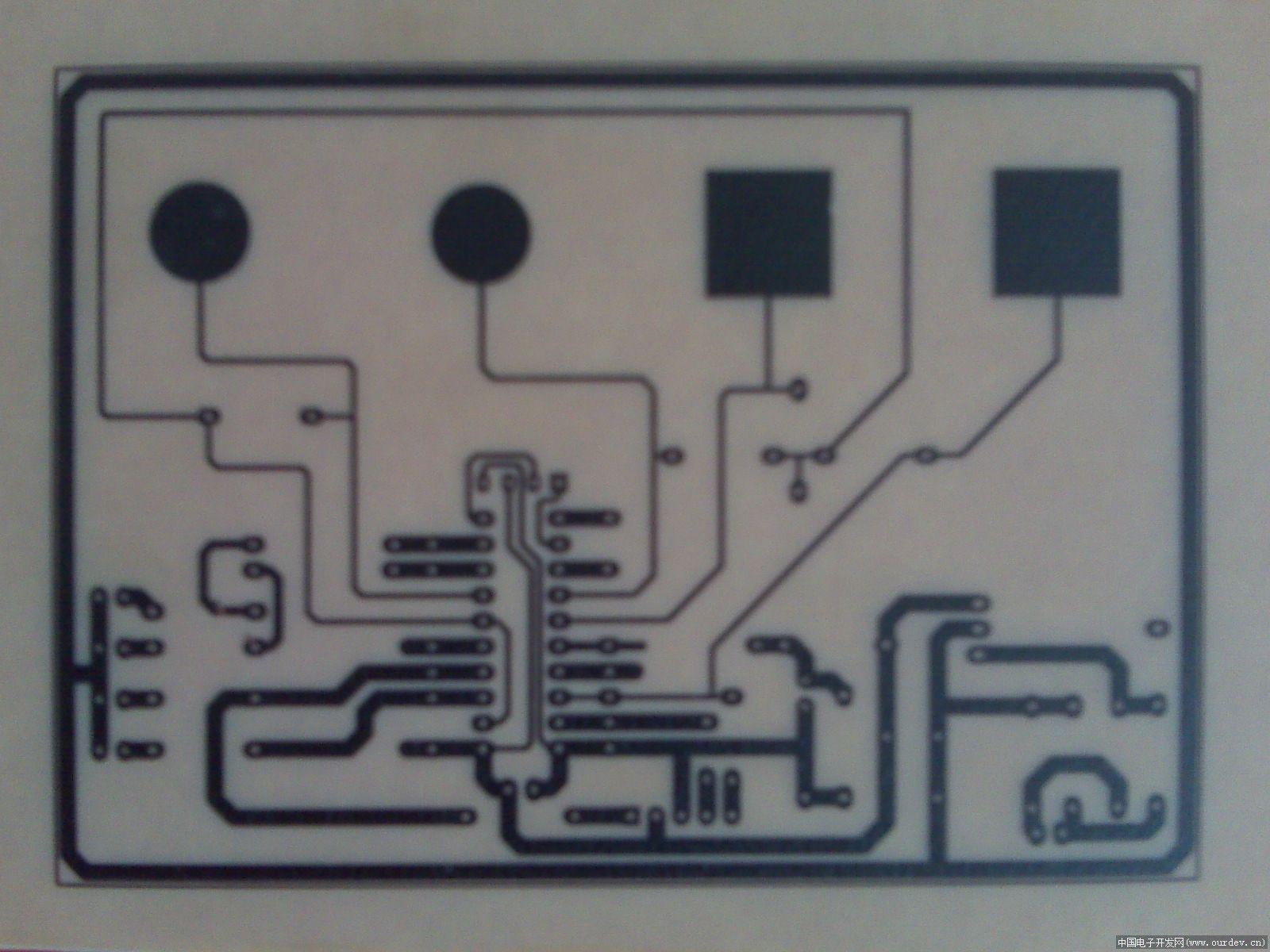
设计参考了应用笔记AN1101-1104;
使用串口通信来读取振荡频率,通过读取没有按下和按下按键的不同频率来确定阀值。
程序运行中也可读取每个按键通道的没有触摸时的1/16平均值,通道的扫描时间为10ms循环。
配置字是,__CONFIG (0x3BC4);
#include<pic.h>
#define uchar unsigned char
#define uint unsigned int
uchar COMP1[]={0x94,0x95,0x96,0x97};//按键通道切换
uchar COMP2[]={0xa0,0xa1,0xa2,0xa3};//按键通道切换
uint average[]={0,0,0,0};//按键振荡计数平均值
uint trip[]={400,400,250,320};//按键振荡计数阀值
uchar ltmr1,htmr1;//计时器1的高8位和低8位暂存
uint raw;//16位传感器当前振荡计数值
uchar index=0; //按键标号
uchar keya,keyb,keyc,keyd; //按键状态
//-----------------------------
uchar usdata=0;//串口发送数据端口号
uchar rbuff; //接收缓存
uchar a1,a2,a3,a4,a5;
void init();//初始化配置
void usart();//串口通信
void touchkey();//按键判断
void main()
{
init();//初始化配置
while(1)
{
usart();//串口通信
touchkey();//按键判断
}
}
void interrupt intcon()
{
if((T0IF)&&(T0IE))
{
T0IF=0;
//进入中断时,10ms读取tmr1的计数值
htmr1=TMR1H; //读取计数器高8位
ltmr1=TMR1L;//读取计数器低8位
raw=raw|htmr1;
raw=(raw<<8)|ltmr1;
// 按钮判断并置位按钮状态
if(raw<((long)average[index]-(long)trip[index]))
{
switch(index)
{
case 0: keya=1; break;
case 1: keyb=1; break;
case 2: keyc=1; break;
case 3: keyd=1; break;
default: break;
}
}
// 按钮判断并置位按钮状态滞后量选200
else if(raw>((long)average[index]-(long)trip[index]+150))
{
switch(index)
{
case 0: keya=0; break;
case 1: keyb=0; break;
case 2: keyc=0; break;
case 3: keyd=0; break;
default: break;
}
//求平均值
average[index]=average[index]+((long)raw-(long)average[index])/16;
}
//按键通道切换每10ms切换
index=(++index)&0x03;
CM1CON0=COMP1[index];
CM2CON0=COMP2[index];
//清零寄存器为扫描下一通道准备
raw=0;
ltmr1=0;
htmr1=0;
TMR0=100;
TMR1H=0;
TMR1L=0;
}
if((TMR1IF)&&(TMR1IE))
{
TMR1IF=0;
TMR1H=0;
TMR1L=0;
}
if((RCIE)&&(RCIF))
{
rbuff=RCREG;//读取接收缓存的数据
if(OERR==1)
{
CREN=0;
asm("nop");
CREN=1;
}
/* TXEN=1; //打开发送使能
TXREG=rbuff;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXEN=0; //关闭发送使能
*/
}
}
//*********初始化配置****************
void init()
{
OSCCON=0x70; //振荡器控制寄存器
GIE=1;//总中断开
PEIE=1;
//------定时器0的配置----
OPTION=0x86; //选项寄存器配置
T0IF=0;//请定时器零中断标志位
T0IE=1;//开定时器零中断
TMR0=100;
//----------------------
//------计数器1的配置--------
T1CON=0x07;
TMR1IF=0;
TMR1IE=1;
TMR1H=0;
TMR1L=0;
//---------------------------
//-------比较器的配置--------
CM1CON0=0x94;
CM2CON0=0xa0;
VRCON=0xcd;
SRCON=0xf0;
CM2CON1=0x02;
//---------------------------
//---------USART的配置-------
TXSTA=0x0c;//发送状态寄存器设置(暂时关闭要发时再开)
RCSTA=0x90;//接收状态寄存器控制
BAUDCTL=0x80;//波特率控制
SPBRG=51;//波特率9600
SPBRGH=0x00;//波特率9600
RCIE=1; //接收中断打开
TXIE=0; //发送中断关闭
//---------------------------
//-----IO口的配置-------
ANSEL=0xf2;// |设为数字IO口
ANSELH=0x00;//|
TRISA=0x22;
PORTA=0x00;
TRISB=0x20;
PORTB=0x00;
TRISC=0x0f;
PORTC=0x00;
RA0=1;
}
//**********USART**************
void usart()
{
if(rbuff==0x74)
{
//------------------------
a1=usdata/10000;
a2=usdata%10000/1000;
a3=usdata%1000/100;
a4=usdata%100/10;
a5=usdata%10;
a1=a1|0x30;
a2=a2|0x30;
a3=a3|0x30;
a4=a4|0x30;
a5=a5|0x30;
//------------------------
TXEN=1; //打开发送使能
TXREG=a1;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a2;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a3;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a4;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a5;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXEN=0; //关闭发送使能
rbuff=0;
}
if(rbuff==0x72)
{
//------------------------
a1=average[usdata]/10000;
a2=average[usdata]%10000/1000;
a3=average[usdata]%1000/100;
a4=average[usdata]%100/10;
a5=average[usdata]%10;
a1=a1|0x30;
a2=a2|0x30;
a3=a3|0x30;
a4=a4|0x30;
a5=a5|0x30;
//------------------------
TXEN=1; //打开发送使能
TXREG=a1;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a2;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a3;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a4;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a5;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXEN=0; //关闭发送使能
rbuff=0;
}
if(rbuff==0x30)
{
usdata=0;
rbuff=0;
}
if(rbuff==0x31)
{
usdata=1;
rbuff=0;
}
if(rbuff==0x32)
{
usdata=2;
rbuff=0;
}
if(rbuff==0x33)
{
usdata=3;
rbuff=0;
}
}
//***************************
//------按键判断
void touchkey()
{
if(keya==1)
{
RA2=1;
RA4=0;
RB4=0;
RB6=1;
RC5=1;
RC6=1;
RC7=1;
}
if(keyb==1)
{
RA2=0;
RA4=0;
RB4=1;
RB6=0;
RC5=0;
RC6=1;
RC7=0;
}
if(keyc==1)
{
RA2=0;
RA4=0;
RB4=0;
RB6=0;
RC5=1;
RC6=1;
RC7=0;
}
if(keyd==1)
{
RA2=1;
RA4=0;
RB4=0;
RB6=1;
RC5=1;
RC6=0;
RC7=0;
}
}
(原文件名:showimg.JPG)
点击此处下载 ourdev_625866YK5I5G.rar(文件大小:1.26M) (原文件名:电容式触摸效果视频.rar)
电容触摸传感简介ourdev_625867ABQUOQ.PDF(文件大小:409K) (原文件名:Microchip-AN1101CN.PDF)
电容触摸传感器布板和物理设计指南ourdev_625868W2B2J9.PDF(文件大小:488K) (原文件名:Microchip-AN1102CN.PDF)
电容触摸传感的软件处理ourdev_625869QUW15A.PDF(文件大小:511K) (原文件名:Microchip-AN1103CN.PDF)
配置多个电容触摸传感按钮ourdev_625870DJNUPS.PDF(文件大小:346K) (原文件名:Microchip-AN1104CN.PDF)
-----------以下为转载内容--------------
设计参考了应用笔记AN1101-1104;
使用串口通信来读取振荡频率,通过读取没有按下和按下按键的不同频率来确定阀值。
程序运行中也可读取每个按键通道的没有触摸时的1/16平均值,通道的扫描时间为10ms循环。
配置字是,__CONFIG (0x3BC4);
#include<pic.h>
#define uchar unsigned char
#define uint unsigned int
uchar COMP1[]={0x94,0x95,0x96,0x97};//按键通道切换
uchar COMP2[]={0xa0,0xa1,0xa2,0xa3};//按键通道切换
uint average[]={0,0,0,0};//按键振荡计数平均值
uint trip[]={400,400,250,320};//按键振荡计数阀值
uchar ltmr1,htmr1;//计时器1的高8位和低8位暂存
uint raw;//16位传感器当前振荡计数值
uchar index=0; //按键标号
uchar keya,keyb,keyc,keyd; //按键状态
//-----------------------------
uchar usdata=0;//串口发送数据端口号
uchar rbuff; //接收缓存
uchar a1,a2,a3,a4,a5;
void init();//初始化配置
void usart();//串口通信
void touchkey();//按键判断
void main()
{
init();//初始化配置
while(1)
{
usart();//串口通信
touchkey();//按键判断
}
}
void interrupt intcon()
{
if((T0IF)&&(T0IE))
{
T0IF=0;
//进入中断时,10ms读取tmr1的计数值
htmr1=TMR1H; //读取计数器高8位
ltmr1=TMR1L;//读取计数器低8位
raw=raw|htmr1;
raw=(raw<<8)|ltmr1;
// 按钮判断并置位按钮状态
if(raw<((long)average[index]-(long)trip[index]))
{
switch(index)
{
case 0: keya=1; break;
case 1: keyb=1; break;
case 2: keyc=1; break;
case 3: keyd=1; break;
default: break;
}
}
// 按钮判断并置位按钮状态滞后量选200
else if(raw>((long)average[index]-(long)trip[index]+150))
{
switch(index)
{
case 0: keya=0; break;
case 1: keyb=0; break;
case 2: keyc=0; break;
case 3: keyd=0; break;
default: break;
}
//求平均值
average[index]=average[index]+((long)raw-(long)average[index])/16;
}
//按键通道切换每10ms切换
index=(++index)&0x03;
CM1CON0=COMP1[index];
CM2CON0=COMP2[index];
//清零寄存器为扫描下一通道准备
raw=0;
ltmr1=0;
htmr1=0;
TMR0=100;
TMR1H=0;
TMR1L=0;
}
if((TMR1IF)&&(TMR1IE))
{
TMR1IF=0;
TMR1H=0;
TMR1L=0;
}
if((RCIE)&&(RCIF))
{
rbuff=RCREG;//读取接收缓存的数据
if(OERR==1)
{
CREN=0;
asm("nop");
CREN=1;
}
/* TXEN=1; //打开发送使能
TXREG=rbuff;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXEN=0; //关闭发送使能
*/
}
}
//*********初始化配置****************
void init()
{
OSCCON=0x70; //振荡器控制寄存器
GIE=1;//总中断开
PEIE=1;
//------定时器0的配置----
OPTION=0x86; //选项寄存器配置
T0IF=0;//请定时器零中断标志位
T0IE=1;//开定时器零中断
TMR0=100;
//----------------------
//------计数器1的配置--------
T1CON=0x07;
TMR1IF=0;
TMR1IE=1;
TMR1H=0;
TMR1L=0;
//---------------------------
//-------比较器的配置--------
CM1CON0=0x94;
CM2CON0=0xa0;
VRCON=0xcd;
SRCON=0xf0;
CM2CON1=0x02;
//---------------------------
//---------USART的配置-------
TXSTA=0x0c;//发送状态寄存器设置(暂时关闭要发时再开)
RCSTA=0x90;//接收状态寄存器控制
BAUDCTL=0x80;//波特率控制
SPBRG=51;//波特率9600
SPBRGH=0x00;//波特率9600
RCIE=1; //接收中断打开
TXIE=0; //发送中断关闭
//---------------------------
//-----IO口的配置-------
ANSEL=0xf2;// |设为数字IO口
ANSELH=0x00;//|
TRISA=0x22;
PORTA=0x00;
TRISB=0x20;
PORTB=0x00;
TRISC=0x0f;
PORTC=0x00;
RA0=1;
}
//**********USART**************
void usart()
{
if(rbuff==0x74)
{
//------------------------
a1=usdata/10000;
a2=usdata%10000/1000;
a3=usdata%1000/100;
a4=usdata%100/10;
a5=usdata%10;
a1=a1|0x30;
a2=a2|0x30;
a3=a3|0x30;
a4=a4|0x30;
a5=a5|0x30;
//------------------------
TXEN=1; //打开发送使能
TXREG=a1;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a2;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a3;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a4;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a5;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXEN=0; //关闭发送使能
rbuff=0;
}
if(rbuff==0x72)
{
//------------------------
a1=average[usdata]/10000;
a2=average[usdata]%10000/1000;
a3=average[usdata]%1000/100;
a4=average[usdata]%100/10;
a5=average[usdata]%10;
a1=a1|0x30;
a2=a2|0x30;
a3=a3|0x30;
a4=a4|0x30;
a5=a5|0x30;
//------------------------
TXEN=1; //打开发送使能
TXREG=a1;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a2;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a3;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a4;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXREG=a5;//把接收到的数据送到发送缓存
while(!TRMT);//等待发送完成
TXEN=0; //关闭发送使能
rbuff=0;
}
if(rbuff==0x30)
{
usdata=0;
rbuff=0;
}
if(rbuff==0x31)
{
usdata=1;
rbuff=0;
}
if(rbuff==0x32)
{
usdata=2;
rbuff=0;
}
if(rbuff==0x33)
{
usdata=3;
rbuff=0;
}
}
//***************************
//------按键判断
void touchkey()
{
if(keya==1)
{
RA2=1;
RA4=0;
RB4=0;
RB6=1;
RC5=1;
RC6=1;
RC7=1;
}
if(keyb==1)
{
RA2=0;
RA4=0;
RB4=1;
RB6=0;
RC5=0;
RC6=1;
RC7=0;
}
if(keyc==1)
{
RA2=0;
RA4=0;
RB4=0;
RB6=0;
RC5=1;
RC6=1;
RC7=0;
}
if(keyd==1)
{
RA2=1;
RA4=0;
RB4=0;
RB6=1;
RC5=1;
RC6=0;
RC7=0;
}
}
(原文件名:showimg.JPG)
点击此处下载 ourdev_625866YK5I5G.rar(文件大小:1.26M) (原文件名:电容式触摸效果视频.rar)
电容触摸传感简介ourdev_625867ABQUOQ.PDF(文件大小:409K) (原文件名:Microchip-AN1101CN.PDF)
电容触摸传感器布板和物理设计指南ourdev_625868W2B2J9.PDF(文件大小:488K) (原文件名:Microchip-AN1102CN.PDF)
电容触摸传感的软件处理ourdev_625869QUW15A.PDF(文件大小:511K) (原文件名:Microchip-AN1103CN.PDF)
配置多个电容触摸传感按钮ourdev_625870DJNUPS.PDF(文件大小:346K) (原文件名:Microchip-AN1104CN.PDF)
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
Sir:
Where is it?
Thank you.
一周热门 更多>