{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn/data/attach/logo/logo.png', '推荐 haozhengzhi 的问题《请问陀螺仪L3G4200温飘如何去除?(已解决)》','https://www.xiaopingtou.net/q-174494.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
本帖最后由 FSL_TICS_ZP 于 2014-10-8 16:16 编辑
 无标题.png (59.78 KB, 下载次数: 0)
下载附件
2014-9-17 16:02 上传
无标题.png (59.78 KB, 下载次数: 0)
下载附件
2014-9-17 16:02 上传
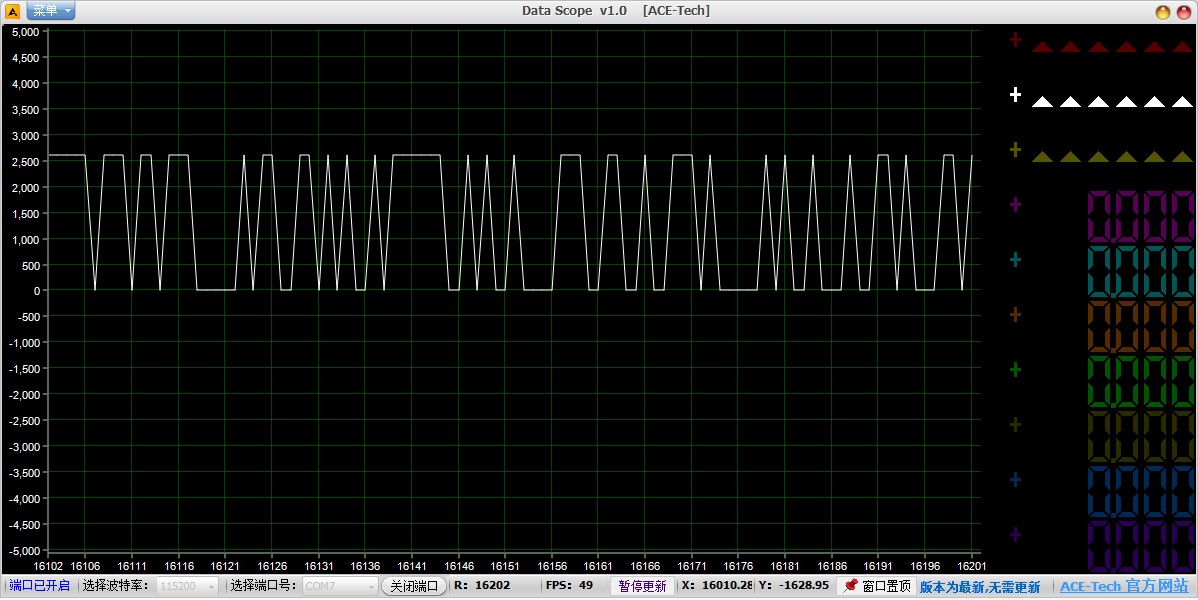
各位,白 {MOD}的是陀螺仪输出的波形,陀螺仪安在车模上且车模静止躺在桌子上,原来以为陀螺仪坏了,最后换了一个新的,还是这样,问学长,他说是温飘,我配置了一下陀螺仪的内部寄存器,配位低通滤波器,但是变化不明显?请问如何解决,多谢了。
无标题.png (59.78 KB, 下载次数: 0)
下载附件
2014-9-17 16:02 上传
友情提示: 此问题已得到解决,问题已经关闭,关闭后问题禁止继续编辑,回答。
一周热门 更多>