{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 九百年的饭团 的文章《smo_sensorless pmsm控制中滑模增益K的选取》','https://www.xiaopingtou.net/article-50818.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
基于李雅普诺夫函数进行稳定性判断可知:滑模观测器中的滑模增益K需要大于电机反电势的幅值,在matlab仿真中得到了验证:
下图一中,滑模增益K选取为25,在0-0.8s之间,电机转速为500rpm,反电势幅值为23V;在0.8-1s之间电机转速为1000rpm,反电势幅值为46V,由于滑模增益k小于反电势幅值,因此,在图二中0.8s之后反电势观测值出现错误。
(注:滑模控制函数选用的是饱和函数)
图一: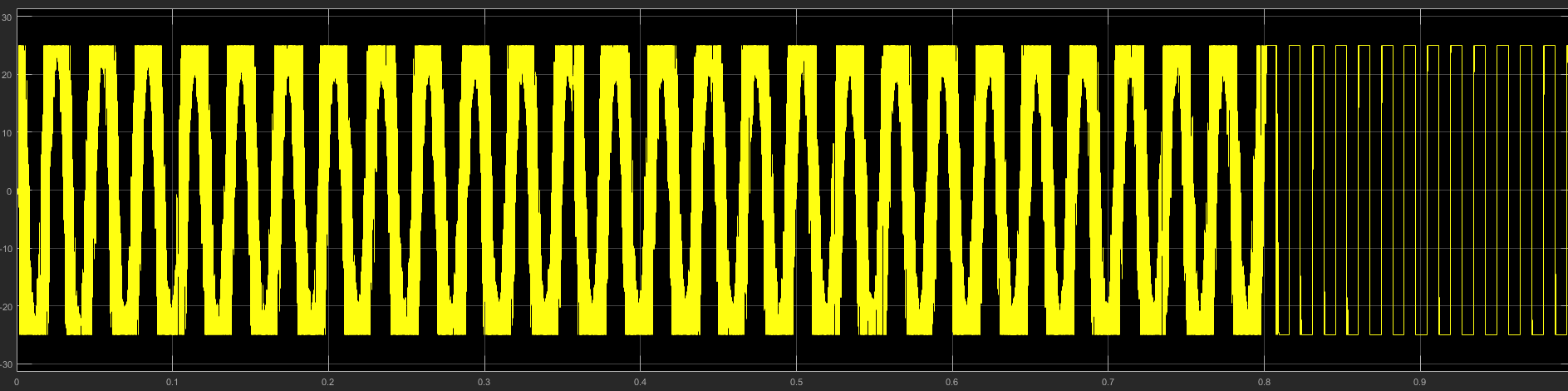 图二:
图二:
图一:
图二: