{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 Mr_Loki 的文章《TI FAST算法学习笔记之“低速高性能电机控制”》','https://www.xiaopingtou.net/article-51240.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
无位置传感器电机控制主要应用于绝大多数时间运行在中、高速的场合,这是因为大多数无位置电机控制技术都需要反电势信号,而反电势信号会有最低频率限制,太低的电机转速会影响到反电势信号的捕获,进而影响转子位置以及转速的估算精度,尽管FAST估算器比一般估算器的最低限制频率都要低,通常低于1Hz,但是它仍然有最低限制频率。
为了能够在零速或者低速连续地估算转子角度,并使得低速和高速能够很好的切换,FAST估算器需要以下两部分来配合使用。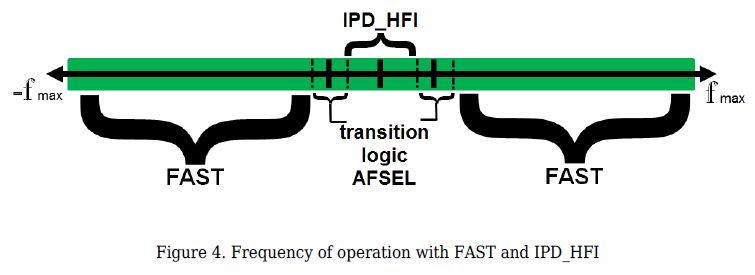 启动阶段的初始位置检测(IPD)和最低限制频率以下的高频注入(HFI)能够扩展FAST适用的转速范围。
启动阶段的初始位置检测(IPD)和最低限制频率以下的高频注入(HFI)能够扩展FAST适用的转速范围。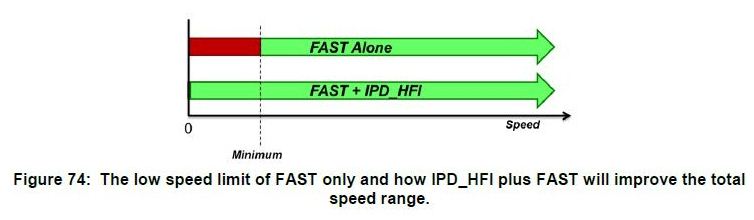
参考文献:InstaSPIN Projects and Labs User's Guide,TI文档。
为了能够在零速或者低速连续地估算转子角度,并使得低速和高速能够很好的切换,FAST估算器需要以下两部分来配合使用。
- IPD_HFI:零速和低速时的初始位置检测(Initial Position Detection,IPD)和高频注入。
- AFSEL:IPD_HFI和FAST之间的逻辑切换(Automatic Frequency SELect)。
启动阶段的初始位置检测(IPD)和最低限制频率以下的高频注入(HFI)能够扩展FAST适用的转速范围。参考文献:InstaSPIN Projects and Labs User's Guide,TI文档。