{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 weixin_40884570 的文章《SecureCRT校准四轴电调》','https://www.xiaopingtou.net/article-51278.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
电调校准主要校准电调的行程和进角
以好盈电调校准为例,下面是官方提供的利用遥控器的方法校准。
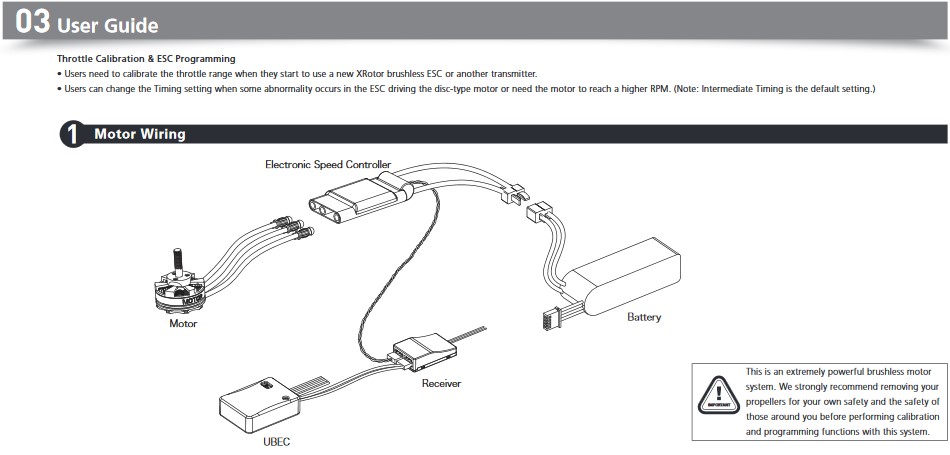
但是遥控器只能单个电调校准,不是很方便,所以采用SecureCRT(自行百度下载)校准电调相对简单轻松。 下面介绍一下SecureCRT多个电调一起校准的方法。
1. SecureCRT链接飞控 利用通用串口线链接飞控板的serial 4/5,安装驱动,打开软件,点击文件->快速链接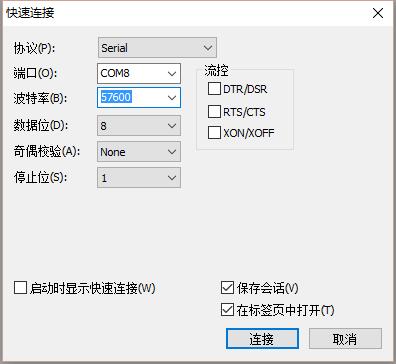
协议选择Serial,端口选择同电脑的设备管理器的端口一致,波特率选择跟飞控的波特率一致。其他点跟上图对照一下,无误后连接。 链接后给飞控上电,串口界面显示:
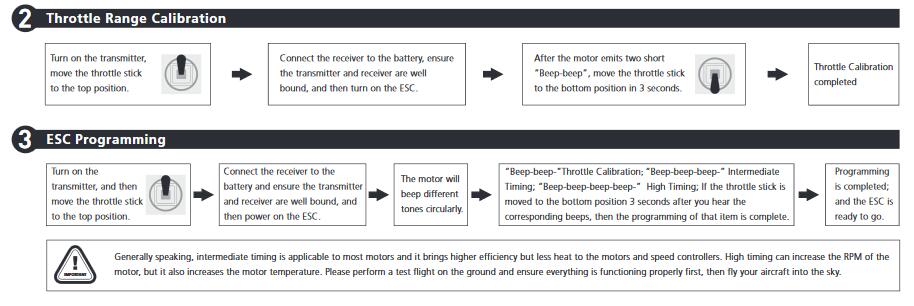
2.电调的行程校准 从好盈官方提供的校准电调的方法看,电调上电,电机bi-bi两声是电调的行程校准,bi-bi-bi三声是电调中进角校准,bi-bi-bi-bi四声是电调高进角校准,所以电调校准的时候就有两个选项供我们选择。注意下面的提示信息中讲的,中进角可适用大部分电机,而且动力系统效率更高,发热小,更易兼容。高进角可以提高电机转速,但是发热也多。所以呢,一般电机用bi-bi-bi三声来校准电调的进角。后面我们也将采用bi-bi-bi三声来校准电调。 执行关闭任务指令
-控制器关闭
有人会问指令是哪里来的,这是预先编译进飞控的一些小程序 可以通过help指令查看
这样如果你还有问题,请留言告诉我
但是遥控器只能单个电调校准,不是很方便,所以采用SecureCRT(自行百度下载)校准电调相对简单轻松。 下面介绍一下SecureCRT多个电调一起校准的方法。
1. SecureCRT链接飞控 利用通用串口线链接飞控板的serial 4/5,安装驱动,打开软件,点击文件->快速链接
协议选择Serial,端口选择同电脑的设备管理器的端口一致,波特率选择跟飞控的波特率一致。其他点跟上图对照一下,无误后连接。 链接后给飞控上电,串口界面显示:
nsh> sercon: Registering CDC/ACM serialdriver
sercon: Successfully registered the CDC/ACMserial driver
param: selected parameter default file/fs/mtd_params
rgbled on I2C bus 2 at 0x55 (bus: 100 KHz,max: 100 KHz)
1: SYS_USE_IO: match
4001: + SYS_AUTOSTART: match
px4io: CRCs match
dataman: Power on restart, data managerfile '/fs/microsd/dataman' size is 103090 bytes
MS5611_SPI on SPI bus 1 at 3 (20000 KHz)
bst: no devices found
adc init done
ver hwcmp match: PX4FMU_V2
HMC5883_I2C on I2C bus 1 at 0x1e (bus: 100KHz, max: 400 KHz)
lis3mdl: no device on bus 2
LIS3MDL bad ID: 3chmc5883: no device on bus1
mpu6000: no device on this bus
MPU6000 on SPI bus 1 at 4 (1000 KHz)
L3GD20 on SPI bus 1 at 1 (11000 KHz)
LSM303D on SPI bus 1 at 2 (11000 KHz)
meas_airspeed: no MS4525 airspeed sensorconnected
ets_airspeed: no ETS airspeed sensorconnected
ets_airspeed: no ETS airspeed sensorconnected
nsh: sf10a: command not found
sensors: mag cal status changed
px4io default PWM output device
mavlink_if0: mode: 0, data rate: 1200 B/son /dev/ttyS1 @ 57600B
157600: SYS_COMPANION: match
mavlink_if1: mode: 3, data rate: 1000 B/son /dev/ttyS2 @ 57600B
param: Error: Parameter TRIG_MODE notfound.
ver hwcmp match: PX4FMU_V2
px4flow [170:100]
px4flow: scanning I2C buses for device..
mavlink_if2: mode: 5, data rate: 800000 B/son /dev/ttyACM0 @ 57600B
param: Error: Parameter EKF2_REC_RPL notfound.
WARN log buffer size: 12288 bytes
INFO [blackbox] /fs/microsd/log/2041-06-27
INFO [blackbox] recording: 01_17_20.px4log
mavlink_if1: Disabling hardware flowcontrol
MULTICOPTER
[i] Mixer: /etc/mixers/quad_x.main.mix on/dev/pwm_output0
[i] Mixer: /etc/mixers/pass.aux.mix on/dev/pwm_output1
0: SYS_MC_EST_GROUP: match
WARN use rtk 1
NuttShell (NSH)
nsh> mavlink_if0: Disabling hardwareflow control
commander_low_prio: settings saved.2.电调的行程校准 从好盈官方提供的校准电调的方法看,电调上电,电机bi-bi两声是电调的行程校准,bi-bi-bi三声是电调中进角校准,bi-bi-bi-bi四声是电调高进角校准,所以电调校准的时候就有两个选项供我们选择。注意下面的提示信息中讲的,中进角可适用大部分电机,而且动力系统效率更高,发热小,更易兼容。高进角可以提高电机转速,但是发热也多。所以呢,一般电机用bi-bi-bi三声来校准电调的进角。后面我们也将采用bi-bi-bi三声来校准电调。 执行关闭任务指令
nsh> mc_att_control stop
执行电调校准指令
nsh> esc_calib -l 900 -h 1934 -a
ATTENTION, please remove or fix propellersbefore starting caibration!
Make sure
- that the ESCs are not powered
- that safety is off (two short blinks)
- that the controllers are stopped
根据提示检查自己的飞机是不是符合以下三条要求
确保
-电调为上电
-安全开关关闭(安全开关信号灯两次短闪)-控制器关闭
Do you want to start calibration now: y or n?[输入y进行下一步]
Outputs armed
High PWM set: 1934
Connect battery now and hit ENTER after theESCs confirm the first calibration step[电调上电,听到bi-bi两声敲Enter]
Low PWM set: 900
Hit ENTER when finished
Outputs disarmedESC calibration finished
3.电调的进角校准
进角校准跟行程校准一样,输入指令
nsh> esc_calib -l 900 -h 1934 -a
ATTENTION, please remove or fix propellersbefore starting calibration!
Make sure
- that the ESCs are not powered
- that safety is off (two short blinks)
- that the controllers are stopped
Do you want to start calibration now: y orn?
WARN CRITICAL BATTERY, SHUT SYSTEM DOWN
Outputs armed
High PWM set: 1934
Connect battery now and hit ENTER after theESCs confirm the first calibration step [电调上电,首先会听到电机bi-bi两声,隔2秒钟,电机bi-bi-bi三声,这时敲Enter]
Low PWM set: 900
Hit ENTER when finished
Outputs disarmedESC calibration finished有人会问指令是哪里来的,这是预先编译进飞控的一些小程序 可以通过help指令查看
nsh> help
help usage: help [-v] []
[ dd hexdump mkfifo pwd umount
? df kill mkrd rm unset
cat echo losetup mh rmdir usleep
cd exec ls mount set xd
cp exit mb mv sh
cmp free mkdir mw sleep
date help mkfatfs ps test
Builtin Apps:
adc
tone_alarm
fmu
px4io
rgbled
mpu6000
mpu9250
lsm303d
l3gd20
hmc5883
ms5611
srf02
sf0x
ll40ls
trone
gps
pwm_out_sim
blinkm
ets_airspeed
meas_airspeed
frsky_telemetry
sensors
px4flow
pwm_input
bst
snapdragon_rc_pwm
lis3mdl
bmi160
bl_update
mixer
param
perf
pwm
esc_calib
reboot
top
config
nshterm
mtd
dumpfile
ver
commander
navigator
mavlink
gpio_led
uavcan
land_detector
attitude_estimator_q
ekf_att_pos_estimator
position_estimator_inav
local_position_estimator
fw_pos_control_l1
fw_att_control
mc_att_control
mc_pos_control
vtol_att_control
sdlog2
uorb
dataman
uart_comm
serdis
sercon 这样如果你还有问题,请留言告诉我