{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 李晓 的文章《PX4开发(2):QGroundControl的使用及电调校准——准备起飞》','https://www.xiaopingtou.net/article-51690.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
1. 介绍
上一节把固件烧写好了,接下来进行传感器的校准了,传感器校准要使用官方的地面站,也就是QGC(QGroundControl,官网下载点击这里)。安装好QGC后打开,然后将pixhawk使用USB线连接到电脑,QGC上就可以显示当前板子的状态。
我这里是校准好了的,所以有一个绿 {MOD}的小点,没有校准应该是红 {MOD}的,接下来进行传感器校准,校准可以参考这个视频。
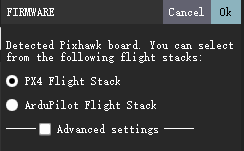
因为我们已经烧写好固件了,所以跳过烧写固件即可。值得注意的是,pixhawk支持两种固件,一种是AMP的固件:Ardupilot Flight Stack,一种是PX4的固件:PX4 Flight Stack,这两种固件都可以通过地面站烧写。一般淘宝上买的为了方便都是刷的AMP固件,而我们之前编译的是PX4固件,之后的开发应该都是基于PX4开发。
上面的视频里面是没有校准电调的,我也就没有校准,完成后就直接拿出去飞了。飞机虽然能够正常起飞,但是一直在小幅度的晃动,这个晃动似乎跟定点没什么关系,因为我打到自稳,晃动依然存在。所以怀疑电调是不是要重新校准了,所以下面开始校准电调。
2. 电调校准
2.1. 电调校准之前拆下螺旋桨!!!
2.2. 使用QGC校准电调
将飞控重新连接地面站,点击Power,在ESC Calirabtion栏目点击Calirabtion,然后地面站提示插上飞机电源,然后我插上电源,电调上电,随后一阵乱叫,最后地面站报错:timeout waiting for bat。意思是等待插上电池时超时,就是说飞控没有检测到接上了电池。我试了很多次,都是这个结果。然后上google搜了一下,发现电调校准好像需要接电流计?想想也是,飞控和电调只通过PWM OUT接口连接,PWM OUT是输出接口,飞控怎么知道电调上电了呢?所以电流计应该是必须的,而我之前为了省钱,没有买电流计,而直接用电调的BEC供电。那么为了校准电调,只能想一些野路子了。
2.3. 查看硬件电路
如果飞控通过电流计才能检测电池是否插上的话,那么电流计除了给飞控供电的功能以外,肯定还有检测电量的功能了,先查看pixhawk的电流计接口定义,也就是power接口。
这里验证了1、2是电源,5、6是地,而3、4分别接到了两个网络标号上:BATT_CURRENT_SENS & BATT_VOLTAGE_SENS 再次查找这两个网标。

发现接到了处理器的PA2和PA3引脚,处理器型号是STM32F427VI,查看芯片是数据手册发现这两个引脚可以复用为AD功能。

 所以初步怀疑,这两个引脚就是两个AD转换通道,通过检测电压来监控当前的电池情况,也就是说,我们只要在这两个引脚上加上电压,PX4就认为电池接上了。
所以初步怀疑,这两个引脚就是两个AD转换通道,通过检测电压来监控当前的电池情况,也就是说,我们只要在这两个引脚上加上电压,PX4就认为电池接上了。 这下校准电调就简单了,在power接口的4号引脚引出,接到一个3.3V电源上。这里我是接到一个单片机开发板的3.3V接口,开发板有一个开关可以控制。 接下来可以把飞控接上地面站了,然后同样点击电调校准,地面站提示接上电源,这时我们把电池接上,同时把开发板打开,给power的4号电压检测端口供电,然后电调滴滴两声,紧接着滴一声,就校准好了。
这里说一下pixhawk的接口,pixhawk顶上的白 {MOD}接口间距是1.25mm,需要购买对应插口的线,直接上淘宝搜索“1.25mm端子线”就能够搜索到,买来后在线的另外一端焊上杜邦线即可。
3. 结论
AMP固件可以不用电流计校准,PX4固件不知道有没有这功能,我把AMP校准电调的方法在PX4上试了,是没有反应的。另外,我查看了飞控的电调校准的源码,其中确实是对4号端口检测电压来判断电池是否接上的,没有用到3号端口的电流计接口,这里就不展开了。电调校准完就可以拿出去飞了,经过测试电调校准后飞机就不会出现抖动了,并且定点模式非常稳,就是yaw有点飘,可是受电机的影响。
飞行时注意: