电容触摸按键原理
RC充放电电路原理
在模拟及脉冲数字电路中,经常涉及RC电路。在这些电路中,根据电阻R和电容C的取值不同、输入和输出关系以及处理的波形之间的关系,产生了具有不同功能的RC电路,
常见的电路应用包括微分电路 、积分电路、耦合电路、滤波电路及脉冲分压器。RC电路在模拟电路、脉冲数字电路中得到广泛的应用。RC电路原理是模、数电的必备基础知识。
RC充放电电路如下图所示:

RC充放电电路原理讲解:
- 图中的开关起初处于开启的状态,电容器C上没有电荷,它两端的电压等于零。
- 当开关闭合时,压降V1通过R向电容器C充电。在电路接通的瞬间,电容器电压Vt=0,充电电流最大值等于V1/R。
- 随着电容器两极上电荷的积累,Vt逐渐增大,电阻器R上的电压VR=V1-Vc,充电电流i=(V1-Vc)/R,且随着时间的增大而越来越小,Vt的上升也越来越慢。当Vt=V1时,i=0,充电过程结束。
电容充电时间与电容大小关系
RC电路充放电公式:
Vt = V0+(V1-V0)* [1-exp(-t/RC)]
其中:V0 为电容上的初始电压值,V1 为电容最终可充到或放到的电压值,Vt 为t时刻电容上的电压值。
如果V0为0,也就是从0V开始充电。那么公式简化为:
Vt= V1* [1-exp(-t/RC)]
由此公式可以看出:
同样的条件下,电容值C跟时间值t成正比关系,电容越大,充电到达某个临界值的时间越长。
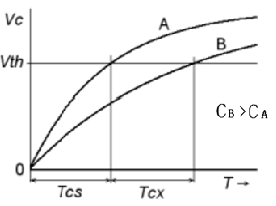
在同一副图中画出两条RC电路曲线,已知电容CB>CA,那么充电到达同一临界值Vth所用的时间关系为:TB>TA。
电容触摸按键
电容触摸按键原理
这里是用的是检测电容充放电时间的方法来判断是否有接触,具体的原理图如下所示:
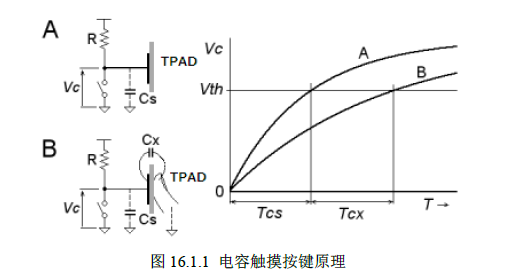
图中R是外接的电容充电电阻,Cs是没有触摸按下时TPAD与PCB之间的杂散电容。而Cx则是有手指触摸按下的时候,手指与TPAD之间形成的电容,这样的话,
有手指触摸按下的时候,电容是Cx+Cs(电容并联相加)。
由之前RC电路的原理讲解,不同的电容,在其他的因素都相同的情况下,充电充电到达同一临界值时需要不同的时间的。电容越大,需要的时间越长。
检测电容触摸按键过程
电容触摸按键模块中,电容放电开关,由STM32的IO口代替。具体的电路图如下:
由此可以得到检测电容触摸按键是否被按下的过程:
- TPAD引脚设置为推挽输出,输出0,实现电容放电到0。
- TPAD引脚设置为浮空输入(IO复位后的状态),电容开始充电。
- 同时开启TPAD引脚的输入捕获开始捕获。
- 等待充电完成(充电到达Vth,检测到上升沿)。
- 计算充电时间。
输入捕获部分的内容,可以参考学习:
【STM32】通用定时器的输入捕获(实例:输入捕获)。
判断依据:
没有按下的时候,充电时间为T1(default)。按下TPAD,电容变大,所以充电时间为T2。我们可以通过检测充放电时间,来判断是否按下。如果T2-T1大于某个值(阈值),就可以判断有按键按下。
STM32控制电容触摸按键
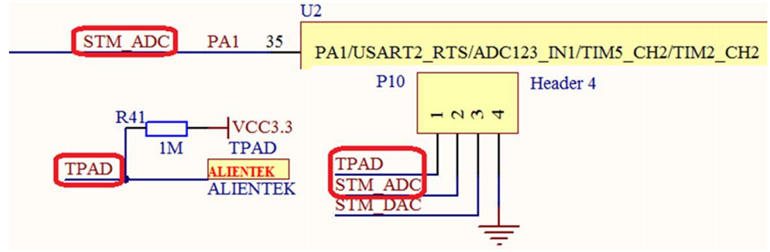
硬件连接
- 单片机:STM32F103ZET6
- 模块:电容触摸按键模块
- 引脚连接:TPAD:PA1
- 硬件资源:指示灯DS0、DS1,定时器TIM5通道2
具体的硬件连接的图如下所示:
STM32控制程序
STM32控制电容触摸按键的主要步骤:
- 初始化触摸按键:初始化定时器TIM5的输入捕获,捕获10次无触摸按下到达上升沿的时间;
- 触摸按键扫描:捕获3次有触摸按下到达上升沿的时间,阈值判断;
#define TPAD_ARR_MAX_VAL 0XFFFF //最大的ARR值
vu16 tpad_default_val=0;//空载的时候(没有手按下),计数器需要的时间
//初始化触摸按键
//获得空载的时候触摸按键的取值.
//返回值:0,初始化成功;1,初始化失败
u8 TPAD_Init(u8 psc)
{
u16 buf[10];
u16 temp;
u8 j,i;
TIM5_CH2_Cap_Init(TPAD_ARR_MAX_VAL,psc-1);//以1Mhz的频率计数
for(i=0;i<10;i++)//连续读取10次
{
buf[i]=TPAD_Get_Val();
delay_ms(10);
}
for(i=0;i<9;i++)//排序
{
for(j=i+1;j<10;j++)
{
if(buf[i]>buf[j])//升序排列
{
temp=buf[i];
buf[i]=buf[j];
buf[j]=temp;
}
}
}
temp=0;
for(i=2;i<8;i++)temp+=buf[i];//取中间的6个数据进行平均
tpad_default_val=temp/6;
printf("tpad_default_val:%d
",tpad_default_val);
if(tpad_default_val>TPAD_ARR_MAX_VAL/2)return 1;//初始化遇到超过TPAD_ARR_MAX_VAL/2的数值,不正常!
return 0;
}
//复位一次
void TPAD_Reset(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能PA端口时钟
//设置GPIOA.1为推挽使出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //PA1 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_1); //PA.1输出0,放电
delay_ms(5);
TIM_SetCounter(TIM5,0); //归0
TIM_ClearITPendingBit(TIM5, TIM_IT_CC2|TIM_IT_Update); //清除中断标志
//设置GPIOA.1为浮空输入
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
//得到定时器捕获值
//如果超时,则直接返回定时器的计数值.
u16 TPAD_Get_Val(void)
{
TPAD_Reset();
while(TIM_GetFlagStatus(TIM5, TIM_IT_CC2) == RESET)//等待捕获上升沿
{
if(TIM_GetCounter(TIM5)>TPAD_ARR_MAX_VAL-500)return TIM_GetCounter(TIM5);//超时了,直接返回CNT的值
};
return TIM_GetCapture2(TIM5);
}
//读取n次,取最大值
//n:连续获取的次数
//返回值:n次读数里面读到的最大读数值
u16 TPAD_Get_MaxVal(u8 n)
{
u16 temp=0;
u16 res=0;
while(n--)
{
temp=TPAD_Get_Val();//得到一次值
if(temp>res)res=temp;
};
return res;
}
//扫描触摸按键
//mode:0,不支持连续触发(按下一次必须松开才能按下一次);1,支持连续触发(可以一直按下)
//返回值:0,没有按下;1,有按下;
#define TPAD_GATE_VAL 100 //触摸的门限值,也就是必须大于tpad_default_val+TPAD_GATE_VAL,才认为是有效触摸.
u8 TPAD_Scan(u8 mode)
{
static u8 keyen=0; //0,可以开始检测;>0,还不能开始检测
u8 res=0;
u8 sample=3; //默认采样次数为3次
u16 rval;
if(mode)
{
sample=6; //支持连按的时候,设置采样次数为6次
keyen=0; //支持连按
}
rval=TPAD_Get_MaxVal(sample);
if(rval>(tpad_default_val+TPAD_GATE_VAL))//大于tpad_default_val+TPAD_GATE_VAL,有效
{
if(keyen==0)res=1; //keyen==0,有效
//printf("r:%d
",rval);
keyen=3; //至少要再过3次之后才能按键有效
}
if(keyen)keyen--;
return res;
}
//定时器2通道2输入捕获配置
void TIM5_CH2_Cap_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM5_ICInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE); //使能TIM5时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能PA端口时钟
//设置GPIOA.1为浮空输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //PA1 端口配置
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //设置为浮空输入
//初始化TIM5
TIM_TimeBaseStructure.TIM_Period = arr; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //预分频器
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化通道2
TIM5_ICInitStructure.TIM_Channel = TIM_Channel_2; //CC1S=01 选择输入端 IC2映射到TI5上
TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM5_ICInitStructure.TIM_ICFilter = 0x03;//IC2F=0011 配置输入滤波器 8个定时器时钟周期滤波
TIM_ICInit(TIM5, &TIM5_ICInitStructure);//初始化I5 IC2
TIM_Cmd(TIM5,ENABLE ); //使能定时器5
}
int main(void)
{
u8 t=0;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
LED_Init(); //LED端口初始化
TPAD_Init(6); //初始化触摸按键
while(1)
{
if(TPAD_Scan(0)) //成功捕获到了一次上升沿(此函数执行时间至少15ms)
{
LED1=!LED1; //LED1取反
}
t++;
if(t==15)
{
t=0;
LED0=!LED0; //LED0取反,提示程序正在运行
}
delay_ms(10);
}
}
整个程序基本只要分析一个函数:
TPAD_Get_Val()函数。
首先需要TPAD_Reset(),它的意义在于先设置PA1推挽输出,同时设置PA1输出低电平放电,延时等待放电完成:
//设置GPIOA.1为推挽使出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1; //PA1 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_ResetBits(GPIOA,GPIO_Pin_1); //PA.1输出0,放电
delay_ms(5);
之后设置PA1浮空输入,清零TIM5的输入捕获:
TIM_SetCounter(TIM5,0); //归0
TIM_ClearITPendingBit(TIM5, TIM_IT_CC2|TIM_IT_Update); //清除中断标志
//设置GPIOA.1为浮空输入
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);
准备工作做完了之后,就可以进行输入捕获了:
while(TIM_GetFlagStatus(TIM5, TIM_IT_CC2) == RESET)//等待捕获上升沿
{
if(TIM_GetCounter(TIM5)>TPAD_ARR_MAX_VAL-500) return TIM_GetCounter(TIM5);//超时了,直接返回CNT的值
};
return TIM_GetCapture2(TIM5);

{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 NadLydia 的文章《【常用模块】电容触摸按键模块(原理讲解、STM32实例操作)》','https://www.xiaopingtou.net/article-52845.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}