{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 jacksoon 的文章《python对肌电信号进行简单的手势识别》','https://www.xiaopingtou.net/article-52881.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
采集前臂四块不同肌肉的表面肌电信号
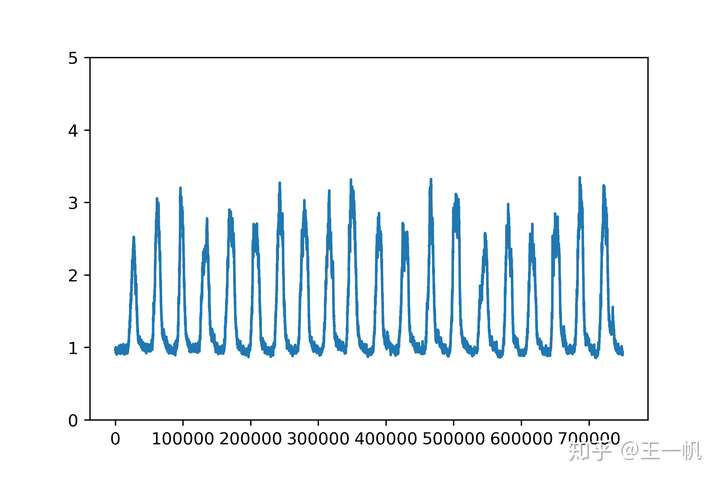
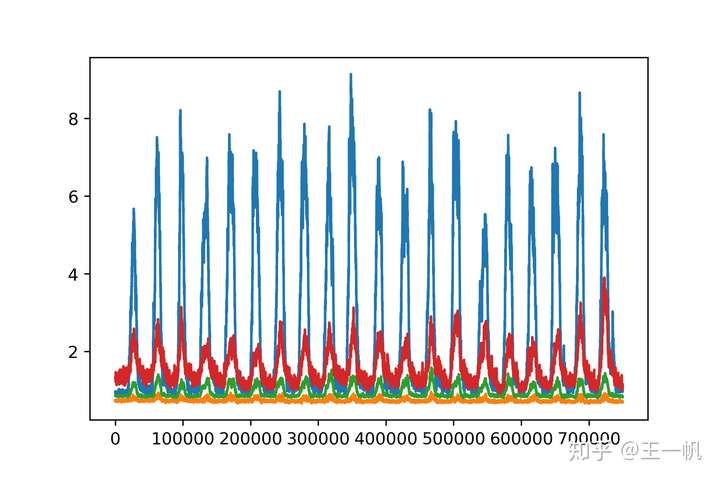 握拳
握拳
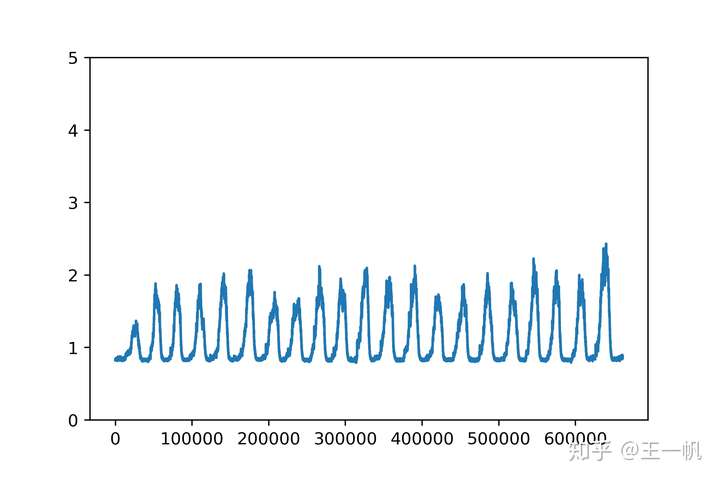
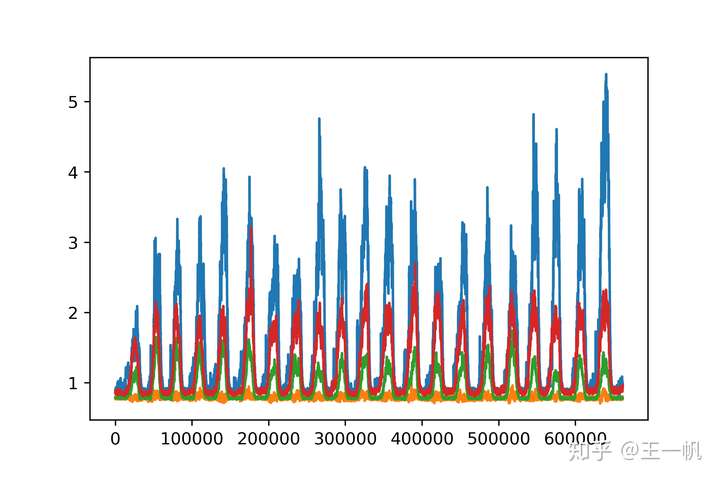 张手
张手
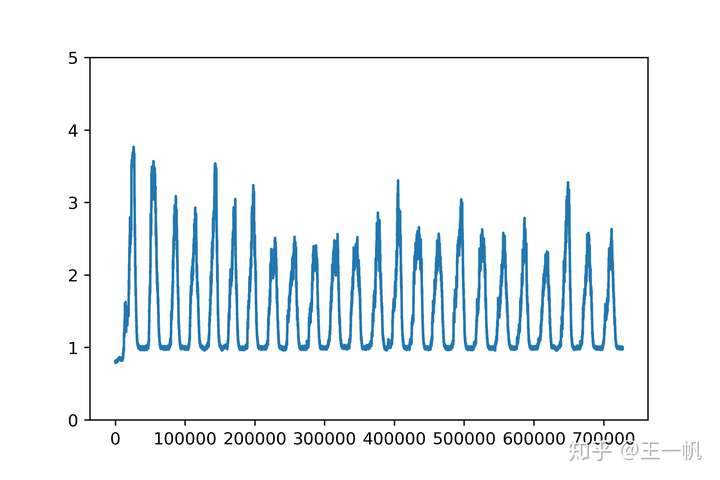
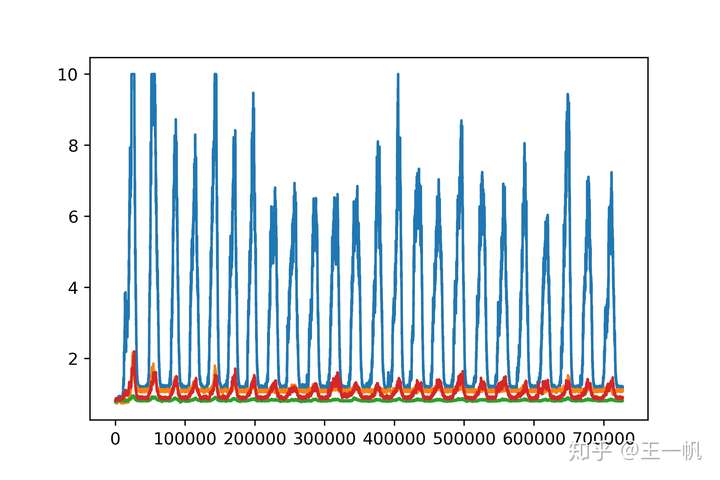 手腕内翻
手腕内翻
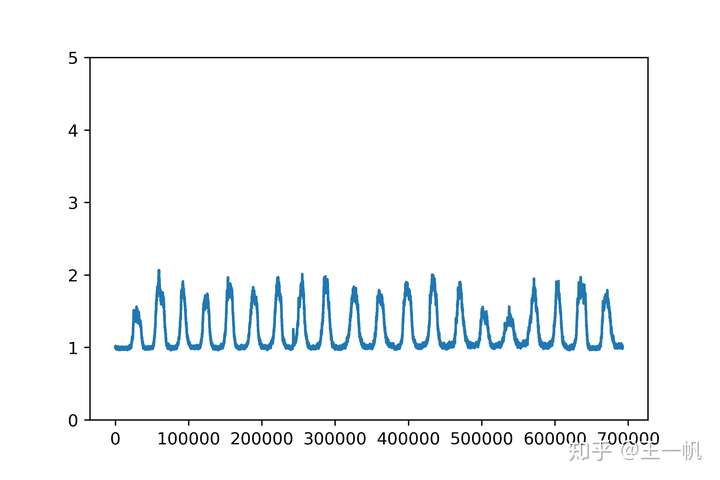
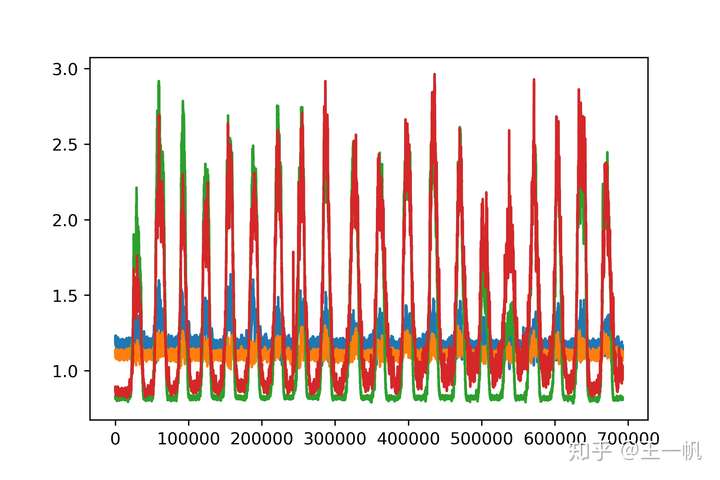 手腕外翻
将四通道的肌肉电信号汇总求其绝对值平均值,利用移动窗口法,取若干连续时间序列对应的信号强度求局域平均,若其后若干点的均值都超过一定阈值,则视为一个动作开始,反之若其后若干点的局域均值都小于阈值,则视为一个动作结束
手腕外翻
将四通道的肌肉电信号汇总求其绝对值平均值,利用移动窗口法,取若干连续时间序列对应的信号强度求局域平均,若其后若干点的均值都超过一定阈值,则视为一个动作开始,反之若其后若干点的局域均值都小于阈值,则视为一个动作结束
 握拳
握拳
 张手
张手
 内翻
内翻
 外翻
外翻
#加载相关模块
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
#读取数据
data1=pd.read_excel('wq20.xlsx',sheetname=1)
data2=pd.read_excel('zs20.xlsx',sheetname=1)
data3=pd.read_excel('n20.xlsx',sheetname=1)
data4=pd.read_excel('w20.xlsx',sheetname=1)
data1.columns=['ch1','ch2','ch3','ch4']
data2.columns=['ch1','ch2','ch3','ch4']
data3.columns=['ch1','ch2','ch3','ch4']
data4.columns=['ch1','ch2','ch3','ch4']
names=locals()
for i in range(1,5):
plt.figure()
plt.plot(names['data%s'%i])
握拳
张手
手腕内翻
手腕外翻
将四通道的肌肉电信号汇总求其绝对值平均值,利用移动窗口法,取若干连续时间序列对应的信号强度求局域平均,若其后若干点的均值都超过一定阈值,则视为一个动作开始,反之若其后若干点的局域均值都小于阈值,则视为一个动作结束
def get_mean_semg(data):
mean_semg=[]
for i in range(len(data)-1):
mean_semg.append((data.ch1[i]+data.ch2[i]+data.ch3[i]+data.ch4[i])/4)
return mean_semg
for i in range(1,5):
names['mean_semg_%s'%i]=get_mean_semg(names['data%s'%i])
plt.figure()
plt.plot(names['mean_semg_%s'%i])
plt.ylim(0,5)
plt.savefig('a%s'%i,dpi=400)
握拳
张手
内翻
外翻
def get_move_window(mean_semg):
mean_semg_arr=np.array(mean_semg)
return pd.rolling_mean(mean_semg_arr,window=800)
def get_break(data,i,thre,windowlenth):
for i in range(i,i+windowlenth):
if data[i]
获取平均值起始点,并将对应时间点作用于原始信号上,对四通道信号进行行动段提取,并将长度较小的部分过滤,视为噪音
for i in range(1,5):
names['period_%s'%i]=[]
names['sta_filt_%s'%i]=[]
names['end_filt_%s'%i]=[]
for j in range(len(names['sta_%s'%i])):
names['period_%s'%i].append(names['end_%s'%i][j]-names['sta_%s'%i][j])
for k in range(len(names['period_%s'%i])):
if names['period_%s'%i][k]>5000:
names['sta_filt_%s'%i].append(names['sta_%s'%i][k])
names['end_filt_%s'%i].append(names['end_%s'%i][k])
for i in range(1,len(sta_filt_1)+1):
names['data1_cut%s'%i]=data1[sta_filt_1[i-1]:end_filt_1[i-1]]
for i in range(1,len(sta_filt_2)+1):
names['data2_cut%s'%i]=data2[sta_filt_2[i-1]:end_filt_2[i-1]]
for i in range(1,len(sta_filt_3)+1):
names['data3_cut%s'%i]=data3[sta_filt_3[i-1]:end_filt_3[i-1]]
for i in range(1,len(sta_filt_4)+1):
names['data4_cut%s'%i]=data4[sta_filt_4[i-1]:end_filt_4[i-1]]
plt.figure(figsize=(50,3))
for i in range(1,21):
plt.subplot2grid((1,20),(0,i-1),colspan=1).plot(names['data1_cut%s'%i])
plt.ylim(0,10)
plt.title('fist')
plt.figure(figsize=(50,3))
for i in range(1,22):
plt.subplot2grid((1,21),(0,i-1),colspan=1).plot(names['data2_cut%s'%i])
plt.ylim(0,10)
plt.title('open')
plt.figure(figsize=(50,3))
for i in range(1,25):
plt.subplot2grid((1,24),(0,i-1),colspan=1).plot(names['data3_cut%s'%i])
plt.ylim(0,10)
plt.title('toright')
plt.figure(figsize=(50,3))
for i in range(1,21):
plt.subplot2grid((1,20),(0,i-1),colspan=1).plot(names['data4_cut%s'%i])
plt.ylim(0,10)
plt.title('toleft')
 握拳
握拳
 张手
张手
 内弯
内弯
 外翻
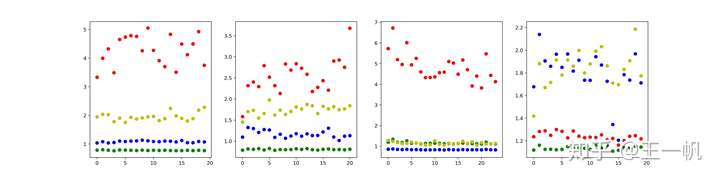
对各通道行动段求区间的平均值MAV,可以看出对于不同的动作,MAV值区别明显,可以作为特征向量对信号进行特征提取
外翻
对各通道行动段求区间的平均值MAV,可以看出对于不同的动作,MAV值区别明显,可以作为特征向量对信号进行特征提取
mav_fist=pd.DataFrame(columns=['ch1','ch2','ch3','ch4'],index=[np.arange(20)])
for i in range(1,21):
mav_fist.loc[i-1,'ch1']=names['data1_cut%s'%i].ch1.mean()
mav_fist.loc[i-1,'ch2']=names['data1_cut%s'%i].ch2.mean()
mav_fist.loc[i-1,'ch3']=names['data1_cut%s'%i].ch3.mean()
mav_fist.loc[i-1,'ch4']=names['data1_cut%s'%i].ch4.mean()
mav_open=pd.DataFrame(columns=['ch1','ch2','ch3','ch4'],index=[np.arange(21)])
for i in range(1,22):
mav_open.loc[i-1,'ch1']=names['data2_cut%s'%i].ch1.mean()
mav_open.loc[i-1,'ch2']=names['data2_cut%s'%i].ch2.mean()
mav_open.loc[i-1,'ch3']=names['data2_cut%s'%i].ch3.mean()
mav_open.loc[i-1,'ch4']=names['data2_cut%s'%i].ch4.mean()
mav_toright=pd.DataFrame(columns=['ch1','ch2','ch3','ch4'],index=[np.arange(24)])
for i in range(1,25):
mav_toright.loc[i-1,'ch1']=names['data3_cut%s'%i].ch1.mean()
mav_toright.loc[i-1,'ch2']=names['data3_cut%s'%i].ch2.mean()
mav_toright.loc[i-1,'ch3']=names['data3_cut%s'%i].ch3.mean()
mav_toright.loc[i-1,'ch4']=names['data3_cut%s'%i].ch4.mean()
mav_toleft=pd.DataFrame(columns=['ch1','ch2','ch3','ch4'],index=[np.arange(20)])
for i in range(1,21):
mav_toleft.loc[i-1,'ch1']=names['data4_cut%s'%i].ch1.mean()
mav_toleft.loc[i-1,'ch2']=names['data4_cut%s'%i].ch2.mean()
mav_toleft.loc[i-1,'ch3']=names['data4_cut%s'%i].ch3.mean()
mav_toleft.loc[i-1,'ch4']=names['data4_cut%s'%i].ch4.mean()
plt.figure(figsize=(20,5))
mav_fist_ax=plt.subplot2grid((1,4),(0,0),colspan=1)
mav_fist_ax.scatter(x=np.arange(20),y=mav_fist.ch1,c='r')
mav_fist_ax.scatter(x=np.arange(20),y=mav_fist.ch2,c='g')
mav_fist_ax.scatter(x=np.arange(20),y=mav_fist.ch3,c='b')
mav_fist_ax.scatter(x=np.arange(20),y=mav_fist.ch4,c='y')
mav_open_ax=plt.subplot2grid((1,4),(0,1),colspan=1)
mav_open_ax.scatter(x=np.arange(21),y=mav_open.ch1,c='r')
mav_open_ax.scatter(x=np.arange(21),y=mav_open.ch2,c='g')
mav_open_ax.scatter(x=np.arange(21),y=mav_open.ch3,c='b')
mav_open_ax.scatter(x=np.arange(21),y=mav_open.ch4,c='y')
mav_toright_ax=plt.subplot2grid((1,4),(0,2),colspan=1)
mav_toright_ax.scatter(x=np.arange(24),y=mav_toright.ch1,c='r')
mav_toright_ax.scatter(x=np.arange(24),y=mav_toright.ch2,c='g')
mav_toright_ax.scatter(x=np.arange(24),y=mav_toright.ch3,c='b')
mav_toright_ax.scatter(x=np.arange(24),y=mav_toright.ch4,c='y')
mav_toleft_ax=plt.subplot2grid((1,4),(0,3),colspan=1)
mav_toleft_ax.scatter(x=np.arange(20),y=mav_toleft.ch1,c='r')
mav_toleft_ax.scatter(x=np.arange(20),y=mav_toleft.ch2,c='g')
mav_toleft_ax.scatter(x=np.arange(20),y=mav_toleft.ch3,c='b')
mav_toleft_ax.scatter(x=np.arange(20),y=mav_toleft.ch4,c='y')
mav_fist['action']=0
mav_open['action']=1
mav_toright['action']=2
mav_toleft['action']=3
sumup=mav_fist.append([mav_open,mav_toright,mav_toleft],ignore_index=True)
y=sumup.action
x=sumup.drop(['action'],axis=1)
from sklearn.model_selection import train_test_split
import xgboost as xgb
train_x,test_x,train_y,test_y=train_test_split(x.as_matrix(),y.as_matrix(),test_size=0.2)
xg_train=xgb.DMatrix(train_x,label=train_y)
xg_test=xgb.DMatrix(test_x,label=test_y)
param = {}
param['objective'] ='multi:softmax'
param['eta']=0.1
param['max_depth']=6
param['silent']=1
param['nthread']=4
param['num_class']=4
watchlist = [(xg_train, 'train'), (xg_test, 'test')]
num_round=5
bst = xgb.train(param, xg_train, num_round, watchlist)
pred = bst.predict(xg_test)
对四个不同的手势进行数字命名,通过xgboost进行训练分析,16个测试样的预测结果正确率为100%
更多Python视频、源码、资料加群683380553免费获取
转载至:https://zhuanlan.zhihu.com/p/41073513