{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 332745855 的文章《P2020 ( e500核 ) 上电启动及uboot流程》','https://www.xiaopingtou.net/article-53592.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
转载地址:http://blog.csdn.net/gorilla0123/article/details/5930304#comments
系统上电到执行第一条指令前,需要经过配置PLL、Local Bus控制器、LAW、MMU等操作,这些配置完全是由Cpu根据芯片的默认值和芯片外部配置引脚的输入状态自动完成的。如:
1) Cpu根据cfg_sys_pll[0:2]的输入状态决定当前CPU的BBC对SYS_CLK的倍频参数;
2) Cpu根据cfg_ddr_pll[0:2] 的输入状态决定DDR的时钟频率(DDR2和DDR3不同);
3) Cpu根据cfg_core0_pll[0:2]/cfg_core1_pll[0:2]的输入状态决定当前CPU的cor0/cor1对CCB的倍频参数;
4) Cpu根据cfg_cpu0_boot和cfg_cpu1_boot的输入状态决定复位时执行boot代码的Core,如下图所示:
 5) Cpu根据cfg_rom_loc[0:3]的输入状态决定Boot ROM的位置。
6) 其它根据外部输入状态决定的配置。
以上,对软件来说最重要的配置是Boot ROM位置的配置。Boot ROM位置与cfg_rom_loc[0:3]输入状态的关系如下图所示:
5) Cpu根据cfg_rom_loc[0:3]的输入状态决定Boot ROM的位置。
6) 其它根据外部输入状态决定的配置。
以上,对软件来说最重要的配置是Boot ROM位置的配置。Boot ROM位置与cfg_rom_loc[0:3]输入状态的关系如下图所示:
 在硬件连接无误的情况下,P2020启动的配置为:
cfg_cpu0_boot=1,core0启动;
cfg_cpu1_boot=0,core1等待;
cfg_rom_loc[0:3] =1110,从Local bus GPCM—16-bit ROM启动;
根据P2020的硬件手册,Cpu复位后执行的第一条指令的地址是0xFFFF,FFFC。因此,Cpu要能正确执行U-boot代码,至少需要下面几个条件:
l Local Access Window能正确转换U-boot代码的物理地址空间
l Local Bus Control能正确转换U-boot代码的物理地址空间
l MMU能正确转换U-boot代码的有效地址空间(e500核的MMU无法关闭)
首先,根据P2020手册,Local Access Window对Boot ROM的地址转换,不通过LAW寄存器配置。在复位时,映射0x0_FF80_0000到启动地址(硬件配置为Local bus GPCM),共8M空间。这样解决了第一个问题。
接着,P2020复位时Local Bus Control寄存器BRn/ORn有默认值为全0,设定了第0个Local Bus Bank的地址空间是从0x0000_0000开始的4G空间,且MSEL=GPCM。这样,所有映射到Local Bus上的地址都会使CS0有效。
然后,MMU在复位时也有默认值。实际上,虽然P2020的MMU有16个TLB1和512个TLB0,复位时仅TLB1的Entry0有效。Entry0将0xFFFF,F000开始的4k有效地址空间映射到0xFFFF,F000开始的4k物理地址空间中,TLB1的Entry0配置如下表所示:
在硬件连接无误的情况下,P2020启动的配置为:
cfg_cpu0_boot=1,core0启动;
cfg_cpu1_boot=0,core1等待;
cfg_rom_loc[0:3] =1110,从Local bus GPCM—16-bit ROM启动;
根据P2020的硬件手册,Cpu复位后执行的第一条指令的地址是0xFFFF,FFFC。因此,Cpu要能正确执行U-boot代码,至少需要下面几个条件:
l Local Access Window能正确转换U-boot代码的物理地址空间
l Local Bus Control能正确转换U-boot代码的物理地址空间
l MMU能正确转换U-boot代码的有效地址空间(e500核的MMU无法关闭)
首先,根据P2020手册,Local Access Window对Boot ROM的地址转换,不通过LAW寄存器配置。在复位时,映射0x0_FF80_0000到启动地址(硬件配置为Local bus GPCM),共8M空间。这样解决了第一个问题。
接着,P2020复位时Local Bus Control寄存器BRn/ORn有默认值为全0,设定了第0个Local Bus Bank的地址空间是从0x0000_0000开始的4G空间,且MSEL=GPCM。这样,所有映射到Local Bus上的地址都会使CS0有效。
然后,MMU在复位时也有默认值。实际上,虽然P2020的MMU有16个TLB1和512个TLB0,复位时仅TLB1的Entry0有效。Entry0将0xFFFF,F000开始的4k有效地址空间映射到0xFFFF,F000开始的4k物理地址空间中,TLB1的Entry0配置如下表所示:
 有了以上的配置,P2020 Cpu复位时就能够从连接在Local Bus的CS0上的Nor Flash执行第一条指令了。具体过程如下:
Cpu从0xFFFF,FFFC有效地址开始执行,先经过MMU转换得到物理地址0xFFFF,FFFC;然后,Local Access Window的特殊转换直接将0xFFFF,FFFC转换到Cpu的外围器件Local bus GPCM—16-bit ROM上;最后,由于Local Bus的CS0覆盖了4G空间,0xFFFF,FFFC直接被送到了Nor Flash(Boot Flash)的地址总线上。如果外接Boot Flash只有16M BYTE,则地址总线仅24位,0xFFFF,FFFC代表了Flash
0xFF,FFFC的地址。
/cpu/mpc85xx/u-boot.lds文件是连接器脚本文件,其中:
.bootpg RESET_VECTOR_ADDRESS - 0xffc:
{
cpu/mpc85xx/start.o (.bootpg)
} :text = 0xffff
规定了/cpu/mpc83xx/start.s的_start_e500代码段放在Flash倒数4K的位置。
.resetvec RESET_VECTOR_ADDRESS:
{
*(.resetvec)
} :text = 0xffff
规定了复位后从resetvec段开始取指令,这个resetvec段放在FFFFFFFC的位置,在/cpu/mpc85xx/resetvec.s中可以看到e500核从倒数第4个字节处取的是一条跳转指令为:
b _start_e500
跳转到位于倒数4K位置的_start_e500标号处。
_start_e500开始的代码会在空间1里建立一个4M的Entry映射,使用的是Entry15,这样就把所有的uboot代码都可以访问到了。然后再会跳到_start标号开始的地方,_start标号位于倒数512K的位置,在这之后的过程和e300核的start.s类似。
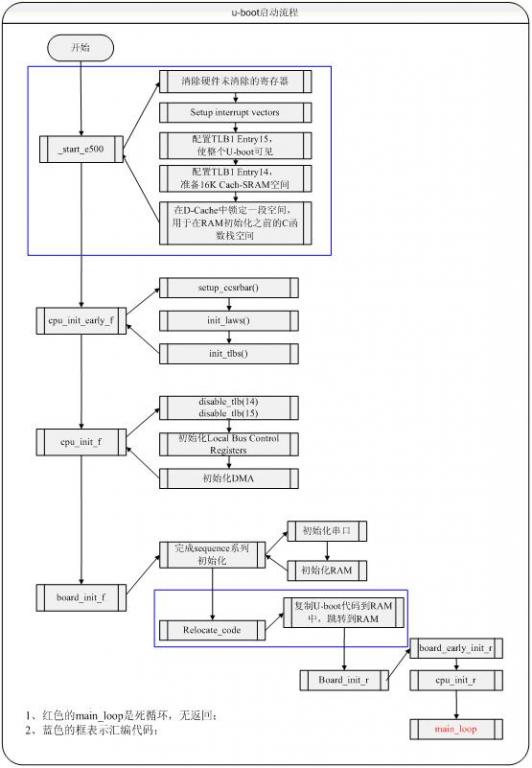
E500核的u-boot的启动是从/cpu/mpc85xx/start.s中的_start_e500标号开始的,经历了/cpu/mpc85xx/start.s,/cpu/mpc85xx/cpu_init_early.c,/cpu/mpc85xx/cpu_init.c,/lib_ppc/Board.c等几个文件中的多个汇编和C函数,最后会在/lib_ppc/Board.c中的board_init_r函数中进入命令死循环,等待执行键入的命令。其具体的流程如下图所示:
有了以上的配置,P2020 Cpu复位时就能够从连接在Local Bus的CS0上的Nor Flash执行第一条指令了。具体过程如下:
Cpu从0xFFFF,FFFC有效地址开始执行,先经过MMU转换得到物理地址0xFFFF,FFFC;然后,Local Access Window的特殊转换直接将0xFFFF,FFFC转换到Cpu的外围器件Local bus GPCM—16-bit ROM上;最后,由于Local Bus的CS0覆盖了4G空间,0xFFFF,FFFC直接被送到了Nor Flash(Boot Flash)的地址总线上。如果外接Boot Flash只有16M BYTE,则地址总线仅24位,0xFFFF,FFFC代表了Flash
0xFF,FFFC的地址。
/cpu/mpc85xx/u-boot.lds文件是连接器脚本文件,其中:
.bootpg RESET_VECTOR_ADDRESS - 0xffc:
{
cpu/mpc85xx/start.o (.bootpg)
} :text = 0xffff
规定了/cpu/mpc83xx/start.s的_start_e500代码段放在Flash倒数4K的位置。
.resetvec RESET_VECTOR_ADDRESS:
{
*(.resetvec)
} :text = 0xffff
规定了复位后从resetvec段开始取指令,这个resetvec段放在FFFFFFFC的位置,在/cpu/mpc85xx/resetvec.s中可以看到e500核从倒数第4个字节处取的是一条跳转指令为:
b _start_e500
跳转到位于倒数4K位置的_start_e500标号处。
_start_e500开始的代码会在空间1里建立一个4M的Entry映射,使用的是Entry15,这样就把所有的uboot代码都可以访问到了。然后再会跳到_start标号开始的地方,_start标号位于倒数512K的位置,在这之后的过程和e300核的start.s类似。
E500核的u-boot的启动是从/cpu/mpc85xx/start.s中的_start_e500标号开始的,经历了/cpu/mpc85xx/start.s,/cpu/mpc85xx/cpu_init_early.c,/cpu/mpc85xx/cpu_init.c,/lib_ppc/Board.c等几个文件中的多个汇编和C函数,最后会在/lib_ppc/Board.c中的board_init_r函数中进入命令死循环,等待执行键入的命令。其具体的流程如下图所示:
5) Cpu根据cfg_rom_loc[0:3]的输入状态决定Boot ROM的位置。
6) 其它根据外部输入状态决定的配置。
以上,对软件来说最重要的配置是Boot ROM位置的配置。Boot ROM位置与cfg_rom_loc[0:3]输入状态的关系如下图所示:
在硬件连接无误的情况下,P2020启动的配置为:
cfg_cpu0_boot=1,core0启动;
cfg_cpu1_boot=0,core1等待;
cfg_rom_loc[0:3] =1110,从Local bus GPCM—16-bit ROM启动;
根据P2020的硬件手册,Cpu复位后执行的第一条指令的地址是0xFFFF,FFFC。因此,Cpu要能正确执行U-boot代码,至少需要下面几个条件:
l Local Access Window能正确转换U-boot代码的物理地址空间
l Local Bus Control能正确转换U-boot代码的物理地址空间
l MMU能正确转换U-boot代码的有效地址空间(e500核的MMU无法关闭)
首先,根据P2020手册,Local Access Window对Boot ROM的地址转换,不通过LAW寄存器配置。在复位时,映射0x0_FF80_0000到启动地址(硬件配置为Local bus GPCM),共8M空间。这样解决了第一个问题。
接着,P2020复位时Local Bus Control寄存器BRn/ORn有默认值为全0,设定了第0个Local Bus Bank的地址空间是从0x0000_0000开始的4G空间,且MSEL=GPCM。这样,所有映射到Local Bus上的地址都会使CS0有效。
然后,MMU在复位时也有默认值。实际上,虽然P2020的MMU有16个TLB1和512个TLB0,复位时仅TLB1的Entry0有效。Entry0将0xFFFF,F000开始的4k有效地址空间映射到0xFFFF,F000开始的4k物理地址空间中,TLB1的Entry0配置如下表所示:
有了以上的配置,P2020 Cpu复位时就能够从连接在Local Bus的CS0上的Nor Flash执行第一条指令了。具体过程如下:
Cpu从0xFFFF,FFFC有效地址开始执行,先经过MMU转换得到物理地址0xFFFF,FFFC;然后,Local Access Window的特殊转换直接将0xFFFF,FFFC转换到Cpu的外围器件Local bus GPCM—16-bit ROM上;最后,由于Local Bus的CS0覆盖了4G空间,0xFFFF,FFFC直接被送到了Nor Flash(Boot Flash)的地址总线上。如果外接Boot Flash只有16M BYTE,则地址总线仅24位,0xFFFF,FFFC代表了Flash
0xFF,FFFC的地址。
/cpu/mpc85xx/u-boot.lds文件是连接器脚本文件,其中:
.bootpg RESET_VECTOR_ADDRESS - 0xffc:
{
cpu/mpc85xx/start.o (.bootpg)
} :text = 0xffff
规定了/cpu/mpc83xx/start.s的_start_e500代码段放在Flash倒数4K的位置。
.resetvec RESET_VECTOR_ADDRESS:
{
*(.resetvec)
} :text = 0xffff
规定了复位后从resetvec段开始取指令,这个resetvec段放在FFFFFFFC的位置,在/cpu/mpc85xx/resetvec.s中可以看到e500核从倒数第4个字节处取的是一条跳转指令为:
b _start_e500
跳转到位于倒数4K位置的_start_e500标号处。
_start_e500开始的代码会在空间1里建立一个4M的Entry映射,使用的是Entry15,这样就把所有的uboot代码都可以访问到了。然后再会跳到_start标号开始的地方,_start标号位于倒数512K的位置,在这之后的过程和e300核的start.s类似。
E500核的u-boot的启动是从/cpu/mpc85xx/start.s中的_start_e500标号开始的,经历了/cpu/mpc85xx/start.s,/cpu/mpc85xx/cpu_init_early.c,/cpu/mpc85xx/cpu_init.c,/lib_ppc/Board.c等几个文件中的多个汇编和C函数,最后会在/lib_ppc/Board.c中的board_init_r函数中进入命令死循环,等待执行键入的命令。其具体的流程如下图所示: