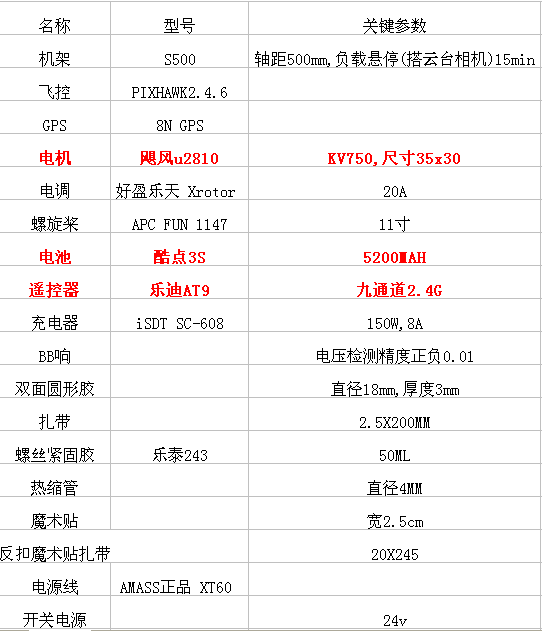
一 四旋翼配置清单
初次尝试组装四旋翼,在淘宝上买相关配件,进行组装。初次组装,比较乱。
二 装机步骤
1:机臂与上层中心板安装,2.5mm螺丝。
2:香蕉头灌锡,电机三线插入,连上电调线
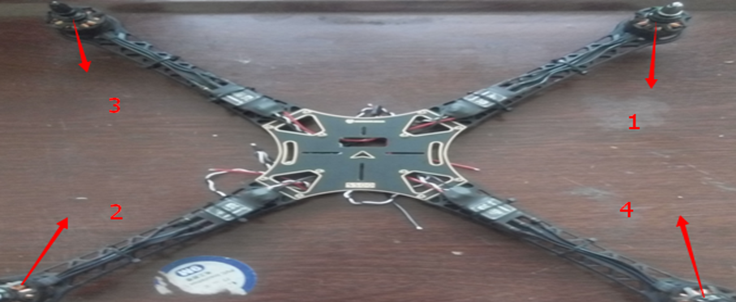
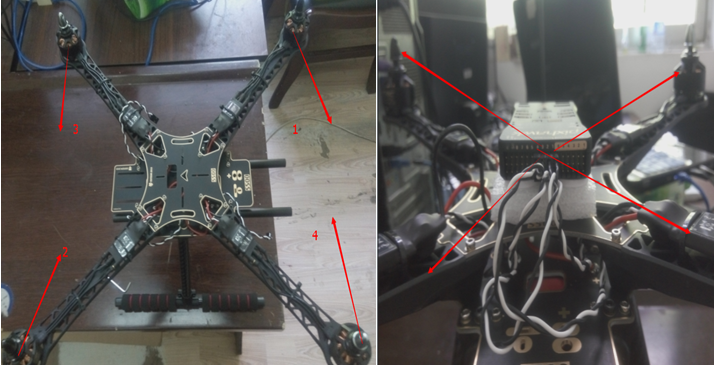
3:装上四个电机,3mm螺丝。注意电机的顺序,银 {MOD}冒为1,2号对角,黑 {MOD}冒3,4号对角,以飞控箭头为正方向。
4:安装脚架
5:连接上中心板和下中心板。注意先在下层板上的+-点上点锡,多点,将电调的红黑线分别点在正负极上,电源模块的公头减掉,露出线也含在下层板的电源正负点上。
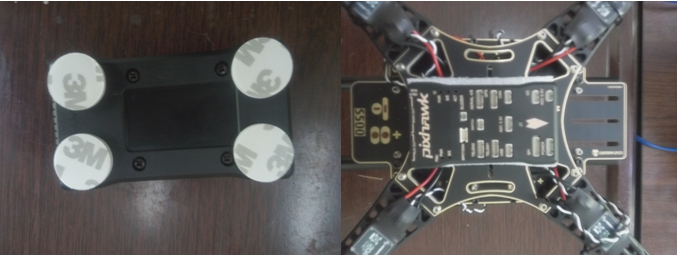
6:安装飞控,3MM双面胶,飞控下面最好用减震板,没有临时用泡沫垫起来。
7:安装GPS支架,上面仍然用3MM胶连接GPS,GPS箭头方向与飞控方向一致。
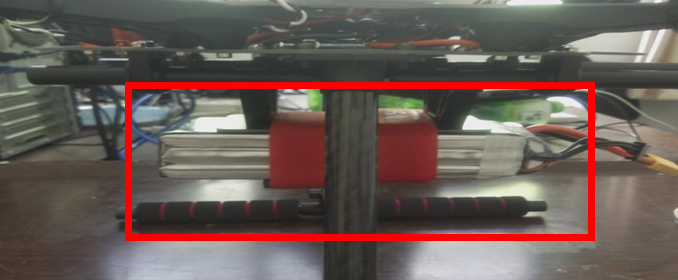
8:电池固定,用反扣魔术带反扣电池
9:安装遥控接收器,电调也可以用3MM双面胶站在下层板上
10:初步完成,后面接线。
总结:装机过程应适当灵活,除了下层板的正负焊点照着连外,其他可按照自己的想法布置。走线应适当合适美观,用扎带扎好。






三接线
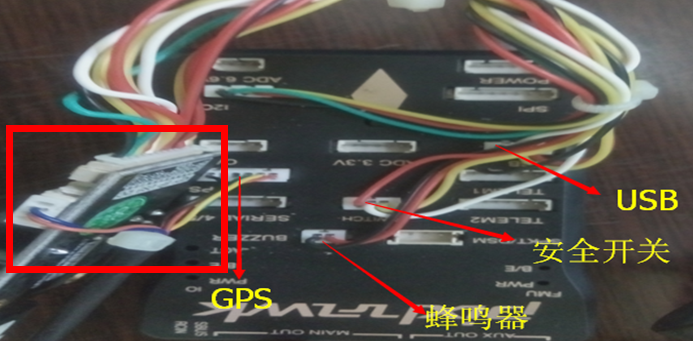
飞控接线
蜂鸣器-BUZZER 安全开关-SWITCHER IIC-IIC USB-usb 图中的将其模块化,变成了集成小板,接法一样(可从排针数判断哪个口对应)
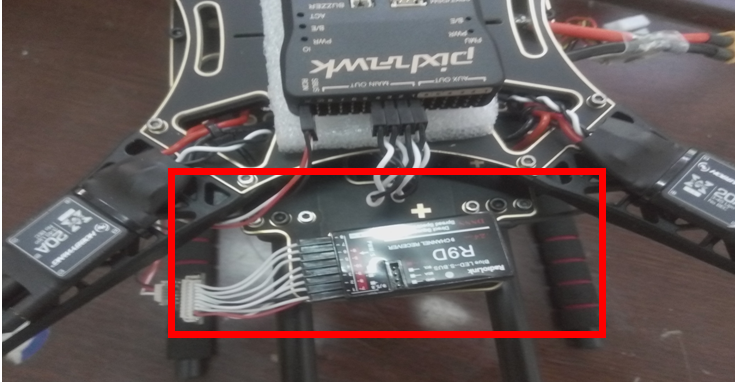
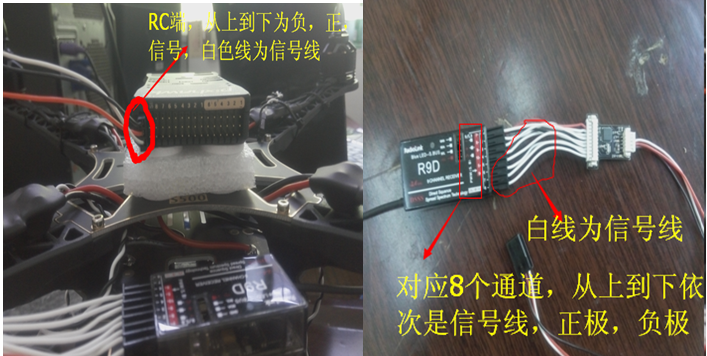
接收机接线:
不用SBUS功能,要用PPM模块,如图,PPM模块一端8通道。分别接接收机的8个通道(反面有标注,如上接就行),另一端接飞控(PIXHAWK)的RC端。整体如下:
电调接线:
电机安装方向如图,对应的电调的信号线接入飞控的MAIN OUT的1,2,3,4.飞控从上到下为负,正,信号线。黑 {MOD}为负。白 {MOD}为信号线
动力电池充电接线:
电池的两根线都要接,排线为平衡口,XT60的为充电口
平衡充电器进入设置模式,选择charge充电模式,3s,Lipo4.2V,8A,设置好后选择start即可(平衡充电器启动会自检,先不要插电池)遥控器电池充电接线
和动力电池类似,两跟线都要接,区别是遥控器电池一般没有XT60头,额外加上去 充电器设置将电流设置2A,其他一样。

{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 chenbingjy#p#dcexp 的文章《四旋翼初次组装》','https://www.xiaopingtou.net/article-56049.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}