{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 u011153192 的文章《永磁同步电机滑模观测器》','https://www.xiaopingtou.net/article-56467.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
滑模观测器的理论我就不多说了,中国知网里的论文一大推,我直接给出我的仿真图及调试过程中的一些经验。
1.先把有速度的双闭环调好
2.在有速度双闭环的基础上再调SMO的反电动势,让其Ualpha和Ubeta调到相差90度的正旋,用示波器scope看
3.再Ualpha和Ubeta的上面加上锁相环PLL,根据有速度的角度与PLL出来的角度比较调节PLL的PI,先把Ki给个差不多的值,再调Kp直到其差不多为止,因为只要转子的位置对了,其速度也就差不多对了
4.用SMO来代替有速度的模块,看估计角度与反馈回来的角度差调节PLL的PI。
上图是我的整个模型

这是SMO的反电动势算法
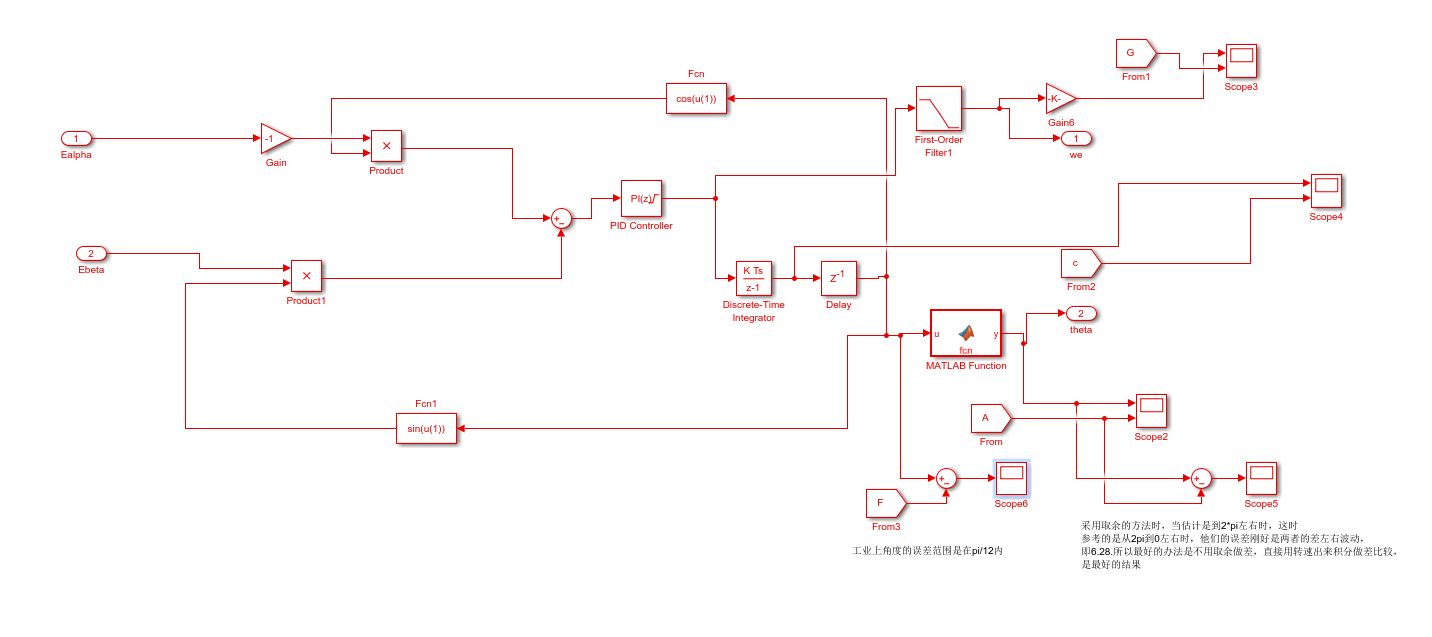
这是PLL,里面有一些工业上角度误差介绍,及一些比较上的介绍
1.先把有速度的双闭环调好
2.在有速度双闭环的基础上再调SMO的反电动势,让其Ualpha和Ubeta调到相差90度的正旋,用示波器scope看
3.再Ualpha和Ubeta的上面加上锁相环PLL,根据有速度的角度与PLL出来的角度比较调节PLL的PI,先把Ki给个差不多的值,再调Kp直到其差不多为止,因为只要转子的位置对了,其速度也就差不多对了
4.用SMO来代替有速度的模块,看估计角度与反馈回来的角度差调节PLL的PI。
上图是我的整个模型
这是SMO的反电动势算法
这是PLL,里面有一些工业上角度误差介绍,及一些比较上的介绍