{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 wangxiongwu 的文章《电机》','https://www.xiaopingtou.net/article-58173.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
1. 基本概念
- 极对数(2p):电机转子中N-S极的对数,如:2,3,4
- 相数(m):电机绕组个数,如:3, 6, 12
1.1 直流有刷电机 vs. 直流无刷电机

- 直流有刷电机:采用机械换向,寿命短,噪声大,产生电火花,效率低。长期使用碳刷磨损严重,较易损坏。同时磨损产生了大量的碳粉尘,这些粉尘落在轴承中,使轴承油加速干涸,电机噪声进一步增大。此类电机连续使用一定时间就需要更换电机内碳刷。
- 直流无刷电机(Permanent Magnet BrushLess DC Motors: PMBLDC):以电子换向取代机械换向,无机械摩擦,无磨损,无电火花,免维护且能做到更加密封。其永磁体,现在多采用高磁能积的稀土钕铁硼材料,因此永磁无刷电动机的体积比同容量三相异步电动机缩小了一个机座号。
- 调速方式的区别
实际上两种电机的控制都是调压,只是由于无刷直流采用了电子换向,所以要有数字控制才可以实现了,而有刷直流是通过碳刷换向的,利用可控硅等传统模拟电路都可以控制,比较简单。
- 有刷马达调速过程是调整马达供电电源电压的高低。调整后的电压电流通过整流子及电刷地转换,改变电极产生的磁场强弱,达到改变转速的目的。这一过程被称之为变压调速。
- 无刷马达调速过程是马达的供电电源的电压不变,改变电调的控制信号,通过微处理器再改变大功率MOS管的开关速率,来实现转速的改变。这一过程被称之为变频调速。
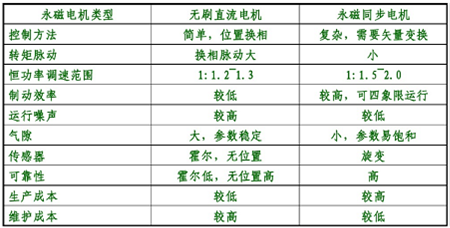
1.2 PMBLDC vs. PMSM
- 永磁同步电机(Permanent Magnetic Synchronous Machine, PMSM):是由永磁体励磁产生同步旋转磁场的同步电机,永磁体作为转子产生旋转磁场,三相定子绕组在旋转磁场作用下通过电枢反应,感应三相对称电流。此时转子动能转化为电能,永磁同步电机作发电机(generator)用;此外,当定子侧通入三相对称电流,由于三相定子在空间位置上相差120,所以三相定子电流在空间中产生旋转磁场,转子旋转磁场中受到电磁力作用运动,此时电能转化为动能,永磁同步电机作电动机(motor)用。
- 位置信号对比

- 控制信号对比
PMBLDC控制信号为梯形波,而PMSM的控制信号为正弦波

- 综合对比
2. 直流无刷电机(BLDC)
- BLDC: BrushLess Direct Current Motor
- 本质:是一种同步电机, 即定子绕组通电产生旋转磁场,吸引转子磁极与之对准,产生轴的运动。
- 霍尔传感器(Hall Sensor):是根据霍尔效应制作的一种磁场传感器, 它可以有效的地反映通过霍尔原件的磁密度。
- 电子换向/相/流:在无刷直流永磁电机中,来自转子位置传感器的信号,经过处理后按一定的逻辑程序,驱使某些与电机绕组相连接的功率开关晶体管在某一瞬间导通或截止,迫使某些原来没有电流的电机绕组内开始流通电流,某些原来有电流的电机绕组内开始关断电流或改变电流的流通方向,从而迫使定子磁状态产生变化。我们把这种利用电子电路来实现电机绕组内电流变化的物理过程称为电子换向(相)或换流。每换流一次,定子磁场状态就改变一次。
2.1 基本原理
- 通电导体产生磁场:特别是通电线圈的磁场和磁体类似。

- 无刷直流电机:利用了通电线圈和永磁体相互作用的原理。

- BLDC的6拍工作方式,线圈产生旋转磁场

2.2 BLDC组成
- 定子 :通电线圈
- 转子:永磁体
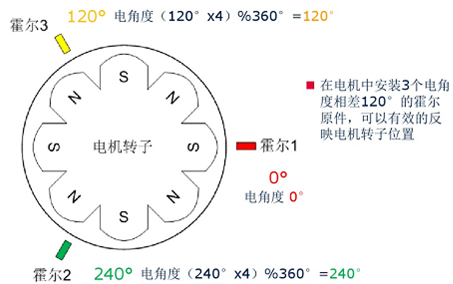
- 霍尔传感器:转子位置传感器(安装在定子上),用于检测转子的磁极位置

- 换相/换流/换向电路:通过6个功率器件组成的3相半桥来控制线圈的6拍通电方式,形成旋转磁场。
2.3 BLDC梯形波控制原理
- 梯形波控制:根据转子磁极位置,对定子线圈进行换相通电,形成6步的旋转磁场,进而带动转子同步转动的控制方式
- 关键技术1:能过安装在转子上的霍尔器件来获取转子磁极位置信息
- 关键技术2:过6个功率器件组成的3相半桥来控制线圈的6拍通电方式,形成旋转磁场
2.3.1 霍尔信号实例
- 霍尔信号实例:当霍尔器件在和转子做相对运动时,会随着转子下磁密度的变化产生对应的信号

2.3.2 霍尔的安装示例
2.3.3 BLDC正反转控制

2.3.4 BLDC调速
- PWM (Pulse Width Modulation) : 通过PWM控制的方式调速
- 通过控制PWM信号的不同占空比, 则绕组上平均电压可以被控制,从而控制电机转速和力矩。根据转速要求设定占空比,然后输出6路PWM信号,加到6个功率管上。

2.3.5 外转子

3. 直流有刷电机
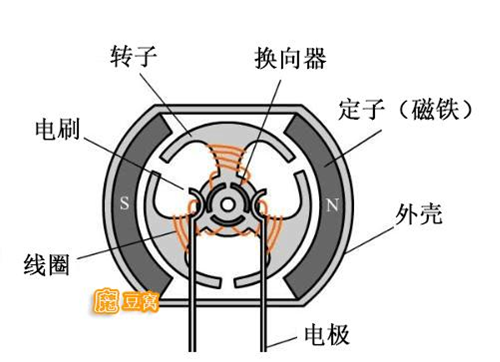
- 有刷电机采用机械换向,磁极不动,线圈旋转。电机工作时,线圈和换向器旋转,磁钢和碳刷不转,线圈电流方向的交替变化是随电机转动的换相器和电刷来完成的。
- 在有刷电机中,这个过程是将各组线圈的两个电源输入端,依次排成一个环,相互之间用绝缘材料分隔,组成一个象圆柱体的东西,与电机轴连成一体,电源通过两个碳元素做成的小柱子(碳刷),在弹簧压力的作用下,从两个特定的固定位置,压在上面线圈电源输入环状圆柱上的两点,给一组线圈通电。
- 随着电机转动,不同时刻给不同线圈或同一个线圈的不同的两极通电,使得线圈产生磁场的N-S极与最靠近的永磁铁定子的N-S极有一个适合的角度差,磁场异性相吸、同性相斥,产生力量,推动电机转动。碳电极在线圈接线头上滑动,象刷子在物体表面刷,因此叫碳“刷”。
- 相互滑动,会摩擦碳刷,造成损耗,需要定期更换碳刷;碳刷与线圈接线头之间通断交替,会发生电火花,产生电磁破,干扰电子设备。
4. 伺服电机(servo motor )
- 伺服电机的作用是将输入的电压信号(即控制电压)转换成轴上的角位移或角速度输出,在自动控制系统中常作为执行元件,所以伺服电机又称为执行电机,其最大的特点是:有控制电压时转子立即旋转,无控制电压时转子立即停转。转轴转向和转速是由控制电压的方向和大小决定的。伺服电机分为交流和直流两大类。
- 伺服主要靠脉冲来定位:基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。直流伺服电机分为有刷和无刷电机。
- 有刷电机:成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。
- 无刷电机:体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护,效率很高,运行温度低,电磁辐射很小,长寿命,可用于各种环境。
- 交流伺服电机:也是无刷电机,分为同步和异步电机,目前运动控制中一般都用同步电机,它的功率范围大,可以做到很大的功率。大惯量,最高转动速度低,且随着功率增大而快速降低。因而适合做低速平稳运行的应用。
- 伺服电机内部的转子是永磁铁:驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)
- 交流伺服电机和无刷直流伺服电机在功能上的区别:交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。
5. 步进电机
- 原理:步进电机利用电磁铁原理,将脉冲信号转换成线位移或角位移的电机。每来一个电脉冲,电机转动一个角度,带动机械移动一小段距离。
- 特点:
- 来一个脉冲,转一个步距角
- 控制脉冲频率,可控制电机转速
- 改变脉冲顺序,改变转动方向
- 角位移量或线位移量与电脉冲数成正比
- 其步距角和转速不受电压波动、负载变化、温度变化等因素的影响
- 精度很高且其误差不会积累,常用于要求较高的自动控制系统中
- https://wenku.baidu.com/view/71c7a225482fb4daa58d4ba6.html