{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 ssropp105 的文章《Linux启动详解1》','https://www.xiaopingtou.net/article-58326.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
一、固件运行
本部分主要参考 戴正华 著《UEFI原理与编程》
CPU在加电后会进入16位实模式状态运行,同时CPU的逻辑电路设计为加电瞬间将CS的值设置为
0xF000、IP的值置为0xFFF0,这样CS:IP就指向0xFFFF0这个地址位置。然后开始执行固件
固件的执行分为七个阶段:
 1.SEC(Security Phase)阶段是平台初始化的第一个阶段,计算机系统加电后进入这个阶段。
(1)SEC阶段功能
UEFI系统开机或重启进入SEC阶段,从功能上说,它执行以下4种任务
1)接受并处理系统启动和重启信号:系统加电信号、系统重启信号、系统运行过程中的严重
异常信号
2)初始化临时存储区域:系统运行在SEC阶段时,仅CPU和CPU内部资源被初始化,各种外
部设备和内存都没有被初始化,因而系统需要一些临时RAM区域,用于代码和数据的存储,我们将之称
为临时RAM,以示与内存的区别。这些临时RAM只能位于CPU内部。最常用的临时RAM是Cache,当
Cache被配置为no--eviction模式时,可以作为内存使用,读命中时返回Cache中的数据,读缺失时不会向
主存发出缺失事件;写命中时讲数据写入Cache,写缺失时不会向主存发出缺失事件,这种技术称为CAR
(Cache As Ram)
3)作为可信系统的根:作为取得对系统控制权的第一部分,SEC阶段时整个可信系统的 根。SEC
能被系统信任,以后的各个阶段才有被信任的基础。通常,SEC在将控制权转移给PEI之前,课可以验证PEI
4)传递系统参数给下一阶段(即PEI):SEC阶段的一切工作都是为PEI阶段做准备,最终SEC要把
控制权转交给PEI,同时要将现阶段的成果汇报给PEI。汇报的手段就是讲如下信息作为参数传递给PEI的入口函数。
$系统当前状态,PEI可以根据这些状态判断系统的健康状况。
$可启动固件(Boot Fireware Volume)的地址和大小。
$临时RAM区域的地址和大小
$栈的地址和大小
(2)SEC阶段执行流程
上面介绍了SEC的功能,下面再来看看SEC的执行流程,如图所示:
1.SEC(Security Phase)阶段是平台初始化的第一个阶段,计算机系统加电后进入这个阶段。
(1)SEC阶段功能
UEFI系统开机或重启进入SEC阶段,从功能上说,它执行以下4种任务
1)接受并处理系统启动和重启信号:系统加电信号、系统重启信号、系统运行过程中的严重
异常信号
2)初始化临时存储区域:系统运行在SEC阶段时,仅CPU和CPU内部资源被初始化,各种外
部设备和内存都没有被初始化,因而系统需要一些临时RAM区域,用于代码和数据的存储,我们将之称
为临时RAM,以示与内存的区别。这些临时RAM只能位于CPU内部。最常用的临时RAM是Cache,当
Cache被配置为no--eviction模式时,可以作为内存使用,读命中时返回Cache中的数据,读缺失时不会向
主存发出缺失事件;写命中时讲数据写入Cache,写缺失时不会向主存发出缺失事件,这种技术称为CAR
(Cache As Ram)
3)作为可信系统的根:作为取得对系统控制权的第一部分,SEC阶段时整个可信系统的 根。SEC
能被系统信任,以后的各个阶段才有被信任的基础。通常,SEC在将控制权转移给PEI之前,课可以验证PEI
4)传递系统参数给下一阶段(即PEI):SEC阶段的一切工作都是为PEI阶段做准备,最终SEC要把
控制权转交给PEI,同时要将现阶段的成果汇报给PEI。汇报的手段就是讲如下信息作为参数传递给PEI的入口函数。
$系统当前状态,PEI可以根据这些状态判断系统的健康状况。
$可启动固件(Boot Fireware Volume)的地址和大小。
$临时RAM区域的地址和大小
$栈的地址和大小
(2)SEC阶段执行流程
上面介绍了SEC的功能,下面再来看看SEC的执行流程,如图所示:
 以临时RAM初始化为界,SEC的执行又分为两大部分:临时 RAM生效之前称为Reset Vector
阶段,临时RAM生效后调用SEC入口函数从而进入SEC功能区
其中Reset Vector的执行流程如下:
1)进入固件入口
2)从实模式转换到32位平坦模式(包含模式)
3)定位固件中的BFV(Boot Firmware Volume)
4)定位BFV中的SEC映像
5)若是64位系统,从32位模式转换到64位模式
6)调用SEC入口函数
下面代码描述了从固件入口Reset Vector到SEC入口函数的执行过程
(EDK2 UEFICpuPkg/ResetVector/Vtf0/Ia16/ResetVectorVtf0.asm)
resetVector:
jmp short EarlyBspInitReal16
(EDK2 UEFICpuPkg/ResetVector/Vtf0/Ia16/Init16.asm )
EarlyBspInitReal16:
mov di, 'BP'
jmp short Main16
(EDK2 UefiCpuPkg/ResetVector/Vtf0/Main.asm)
Main16:
OneTimeCall EarlyInit16
OneTimeCall TransitionFromReal16To32BitFlat ; //从实模式转换到32位平坦模式
OneTimeCall Flat32SearchForBfvBase; //定位固件中的BFV
OneTimeCall Flat32SearchForSecEntryPoint; //定位BFV中的SEC镜像
//esi寄存器存放了SEC的入口地址,ebp寄存器存放了BFV起始地址
%ifdef ARCH_IA32
mov eax ,esp
jmp esi; 跳转到SEC入口
%else
OneTimeCall Transition32To64Flat; //从32位模式转换到64位模式
................
jmp rsi; //跳到SEC入口
%endif
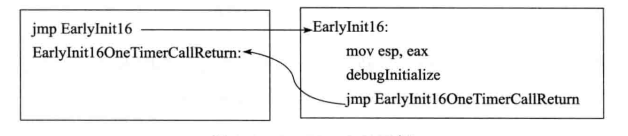
在Reset Vector部分,因为系统还没有RAM,因而不能使用基于栈的程序设计
所有的函数调用都使用jmp指令模拟。OneTimeCall是宏,用于模拟call指令。例如宏调用
OneTimeCall EarlyInit16,如图:
以临时RAM初始化为界,SEC的执行又分为两大部分:临时 RAM生效之前称为Reset Vector
阶段,临时RAM生效后调用SEC入口函数从而进入SEC功能区
其中Reset Vector的执行流程如下:
1)进入固件入口
2)从实模式转换到32位平坦模式(包含模式)
3)定位固件中的BFV(Boot Firmware Volume)
4)定位BFV中的SEC映像
5)若是64位系统,从32位模式转换到64位模式
6)调用SEC入口函数
下面代码描述了从固件入口Reset Vector到SEC入口函数的执行过程
(EDK2 UEFICpuPkg/ResetVector/Vtf0/Ia16/ResetVectorVtf0.asm)
resetVector:
jmp short EarlyBspInitReal16
(EDK2 UEFICpuPkg/ResetVector/Vtf0/Ia16/Init16.asm )
EarlyBspInitReal16:
mov di, 'BP'
jmp short Main16
(EDK2 UefiCpuPkg/ResetVector/Vtf0/Main.asm)
Main16:
OneTimeCall EarlyInit16
OneTimeCall TransitionFromReal16To32BitFlat ; //从实模式转换到32位平坦模式
OneTimeCall Flat32SearchForBfvBase; //定位固件中的BFV
OneTimeCall Flat32SearchForSecEntryPoint; //定位BFV中的SEC镜像
//esi寄存器存放了SEC的入口地址,ebp寄存器存放了BFV起始地址
%ifdef ARCH_IA32
mov eax ,esp
jmp esi; 跳转到SEC入口
%else
OneTimeCall Transition32To64Flat; //从32位模式转换到64位模式
................
jmp rsi; //跳到SEC入口
%endif
在Reset Vector部分,因为系统还没有RAM,因而不能使用基于栈的程序设计
所有的函数调用都使用jmp指令模拟。OneTimeCall是宏,用于模拟call指令。例如宏调用
OneTimeCall EarlyInit16,如图:
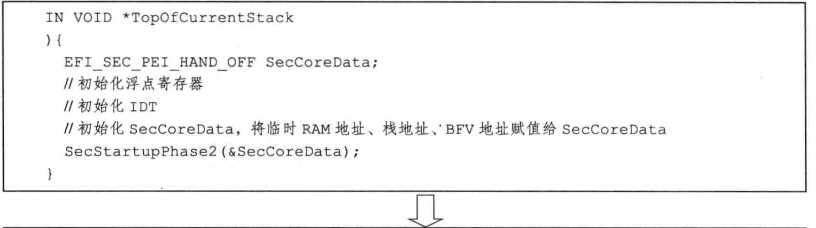
 进入SEC功能区后,首先利用CAR技术初始化栈,初始化IDT,初始化 EFI_SEC_PEI_HAND_OFF
将控制权转交给PEI,并讲EFI_SEC_PEI_HAND_OFF传递给PEI。
不同的硬件平台,SEC代码会有不同的实现方式,但大致执行过程相似。下面以OVMF为例,介绍SEC
功能区的执行过程。
进入SEC功能区后,首先利用CAR技术初始化栈,初始化IDT,初始化 EFI_SEC_PEI_HAND_OFF
将控制权转交给PEI,并讲EFI_SEC_PEI_HAND_OFF传递给PEI。
不同的硬件平台,SEC代码会有不同的实现方式,但大致执行过程相似。下面以OVMF为例,介绍SEC
功能区的执行过程。


 2.PEI阶段
PEI(Pre-EFI Initialization)阶段资源仍然十分有限内存到了PEI后期才被初始化,其主要功能
是为DXE准备执行环境,将需要传递到DXE的信息组成HOB(Handoff Block)列表,最终将控制权转交
到DXE手中。PEI执行流程如图:
2.PEI阶段
PEI(Pre-EFI Initialization)阶段资源仍然十分有限内存到了PEI后期才被初始化,其主要功能
是为DXE准备执行环境,将需要传递到DXE的信息组成HOB(Handoff Block)列表,最终将控制权转交
到DXE手中。PEI执行流程如图:
 从功能上讲,PEI可分为以下两部分。
$PEI内核(PEI Foundation):负责PEI基础服务和流程
$PEIM(PEI Moudule)派遣器:主要功能是找出系统中所有 PEIM,并根据PEIM之间的依赖
关系按顺序执行PEIM。PEI阶段对系统的初始化主要由PEIM完成的。
每个PEIM是一个独立的模块,模块的入口函数类型定义如下:
typedef EFI_STATUS(EFIAPI *EFI_PEIM_ENTRY_POINT32(
IN EFI_PEI_FILE_HANDLE FileHandle,IN CONST EFI_PEI_SERVICE **PeiServices
)
通过PEIServices,PEIM可以使用PEI阶段提供的系统服务,通过这些系统服务,PEIM可以访问
PEI内核。PEIM之间的通信通过PPI(PEIM-to-PEIM Interfaces)完成。
PPI与DXE阶段的Protocol类似,每个PPI是一个结构体,包含了函数指针和变量,
例如:
struct _EFI_PEI_DECOMPRESS_PPI{
EFI_PEI_DECOMPRESS_DECOMPRESS Decompress;
}
extern EFI_GUID gEfiPeiDecompressPpiGuid;
每个PPI都有一个GUID。根据GUID,通过PeiServices的LocatePpi服务可以得到GUID对应的PPI实例
UEFI的一个重要特点是其模块化的设计。模块载入内存后生成Image。Image的的入口函数为
_ModuleEntryPoint。PEI也是一个模块,PEI Image的入口函数_ModuleEntryPoint,位于MdePkg/Library/PeimEntryPoint
/PeimEntryPoint.c。_ModuleEntryPoint最终调用PEI模块的入口函数PeiCore,位于MdePkg/Library/PeimEntryPoint/PerMain.c
进入PeiCore后,首先根据从SEC阶段传入的信息设置Pei Core Services,然后调用PeiDispatcher执行系统中的PEIM,当
内存初始化后,系统会发生栈切换并重新进入PeiCore。重新进入PeiCore后使用的内存为我们所熟悉的内存。所有PEIM都执行
完毕后,调用PeiServices的LocatePpi服务得到DXE IPL PPI,并调用DXE IPL PPI的Entry服务,这个Entry服务实际上是
DxeLoadCore,它找出DXE Image的入口函数,执行DXE image的入口函数并讲HOB列表传递给DXE。
3.DXE阶段
DXE(Driver Execution Environment)阶段执行大部分系统初始化工作,进入此阶段时,内存已经可以被完全使用,因而此阶段
可以进行大量的的复杂工作。从程序设计的角度讲,DXE阶段与PEI阶段相似,执行流程如下:
从功能上讲,PEI可分为以下两部分。
$PEI内核(PEI Foundation):负责PEI基础服务和流程
$PEIM(PEI Moudule)派遣器:主要功能是找出系统中所有 PEIM,并根据PEIM之间的依赖
关系按顺序执行PEIM。PEI阶段对系统的初始化主要由PEIM完成的。
每个PEIM是一个独立的模块,模块的入口函数类型定义如下:
typedef EFI_STATUS(EFIAPI *EFI_PEIM_ENTRY_POINT32(
IN EFI_PEI_FILE_HANDLE FileHandle,IN CONST EFI_PEI_SERVICE **PeiServices
)
通过PEIServices,PEIM可以使用PEI阶段提供的系统服务,通过这些系统服务,PEIM可以访问
PEI内核。PEIM之间的通信通过PPI(PEIM-to-PEIM Interfaces)完成。
PPI与DXE阶段的Protocol类似,每个PPI是一个结构体,包含了函数指针和变量,
例如:
struct _EFI_PEI_DECOMPRESS_PPI{
EFI_PEI_DECOMPRESS_DECOMPRESS Decompress;
}
extern EFI_GUID gEfiPeiDecompressPpiGuid;
每个PPI都有一个GUID。根据GUID,通过PeiServices的LocatePpi服务可以得到GUID对应的PPI实例
UEFI的一个重要特点是其模块化的设计。模块载入内存后生成Image。Image的的入口函数为
_ModuleEntryPoint。PEI也是一个模块,PEI Image的入口函数_ModuleEntryPoint,位于MdePkg/Library/PeimEntryPoint
/PeimEntryPoint.c。_ModuleEntryPoint最终调用PEI模块的入口函数PeiCore,位于MdePkg/Library/PeimEntryPoint/PerMain.c
进入PeiCore后,首先根据从SEC阶段传入的信息设置Pei Core Services,然后调用PeiDispatcher执行系统中的PEIM,当
内存初始化后,系统会发生栈切换并重新进入PeiCore。重新进入PeiCore后使用的内存为我们所熟悉的内存。所有PEIM都执行
完毕后,调用PeiServices的LocatePpi服务得到DXE IPL PPI,并调用DXE IPL PPI的Entry服务,这个Entry服务实际上是
DxeLoadCore,它找出DXE Image的入口函数,执行DXE image的入口函数并讲HOB列表传递给DXE。
3.DXE阶段
DXE(Driver Execution Environment)阶段执行大部分系统初始化工作,进入此阶段时,内存已经可以被完全使用,因而此阶段
可以进行大量的的复杂工作。从程序设计的角度讲,DXE阶段与PEI阶段相似,执行流程如下:
 与PEI类似,从功能上讲,DXE可分为以下两部分。
$DXE内核:负责DXE基础服务和执行流程
$ DXE派遣器:负责调度执行DXE驱动,初始化系统设备
DXE提供的基础服务包括系统表、启动服务、Run Time Services。
每个DXE驱动是一个独立的模块,模块入口函数类型定义为:
typedef EFI_STATUS(EFIAPI *EFI_IMAGE_ENTRY_PINT)(
IN EFI_HANDLE ImageHandle,
IN EFI_SYSTEM_TABLE *SystemTable
);
DXE驱动之间通过Protocol通信。Protocol是一种特殊的结构体, 每个Protocol对应一个
GUID,利用系统BootServices的OpenProtocol,并根据GUID来打开对应的Protocol,进而使用这个
Protocol 提供的服务。
当所有的Driver都执行完毕后,系统完成初始化,DXE通过EFI_BDS_ARCH_PROTOCOL找到
BDS并调用BDS的入口函数,从而进入BDS阶段。从本质上讲,BDS是一种特殊的DXE阶段的应用程序。
4.BDS阶段
BDS(Boot Services Selection)的主要功能是执行启动策略,其主要功能包括:
$初始化控制台设备。
$ 加载必要的设备驱动。
$根据系统设置加载和执行启动项
如果加载启动项失败,系统讲重新执行DXE dispatcher以加载更多的驱动,然后重新尝试加载启动项。
BDS策略通过全局NVRAM变量配置。这些变量可以通过运行时服务GetVariable()读取,通过SetVariable()
设置。例如,变量BootOrder定义了启动顺序,变量Boot####定义了各个启动项(####为4个十六进制大写符号)
用户选中某个启动项(或系统进入默认的启动)后,OS Loader启动,系统进入TSL阶段。
5、TSL阶段
TSL(Transient System Load)是操作系统加载器(OS Loader)执行的第一阶段,在这一阶段OS Loader
作为一个UEFI应用程序运行,系统资源仍然由UEFI内核控制。当启动服务ExitBootServices()服务被调用后系统进入
RunTime阶段。
TSL阶段之所以称为临时系统,在于它存在的目的就是为操作系统加载器准备执行环境。虽然是临时系统,但
其功能已经很强大,已经具备了操作系统的雏形,UEFI Shell是这个临时系统的人机交互界面。正常情况下 ,系统不会
进入UEFI Shell,而是直接执行操作系统加载器,只有在用户干预下或操作系统加载器遇到严重错误时才会进入UEFI Shell。
6、RT阶段
系统进入RT(Run Time)阶段后,系统的控制权从UEFI内核转交到OS Loader手中,UEFI占用的各种资源被回收到
OS Loader,仅有UEFI运行时服务保留给OS Loader和OS使用。随着OS Loader的执行,OS最终取得对系统的控制权。
7、AL阶段
在RT阶段,如果系统(硬件或软件)遇到灾难性错误,系统固件需要提供错误处理和灾难恢复机制,这种机制运行在
AL(After Life)阶段。UEFI和UEFI PI标准都没有定义此阶段的行为和规范。
与PEI类似,从功能上讲,DXE可分为以下两部分。
$DXE内核:负责DXE基础服务和执行流程
$ DXE派遣器:负责调度执行DXE驱动,初始化系统设备
DXE提供的基础服务包括系统表、启动服务、Run Time Services。
每个DXE驱动是一个独立的模块,模块入口函数类型定义为:
typedef EFI_STATUS(EFIAPI *EFI_IMAGE_ENTRY_PINT)(
IN EFI_HANDLE ImageHandle,
IN EFI_SYSTEM_TABLE *SystemTable
);
DXE驱动之间通过Protocol通信。Protocol是一种特殊的结构体, 每个Protocol对应一个
GUID,利用系统BootServices的OpenProtocol,并根据GUID来打开对应的Protocol,进而使用这个
Protocol 提供的服务。
当所有的Driver都执行完毕后,系统完成初始化,DXE通过EFI_BDS_ARCH_PROTOCOL找到
BDS并调用BDS的入口函数,从而进入BDS阶段。从本质上讲,BDS是一种特殊的DXE阶段的应用程序。
4.BDS阶段
BDS(Boot Services Selection)的主要功能是执行启动策略,其主要功能包括:
$初始化控制台设备。
$ 加载必要的设备驱动。
$根据系统设置加载和执行启动项
如果加载启动项失败,系统讲重新执行DXE dispatcher以加载更多的驱动,然后重新尝试加载启动项。
BDS策略通过全局NVRAM变量配置。这些变量可以通过运行时服务GetVariable()读取,通过SetVariable()
设置。例如,变量BootOrder定义了启动顺序,变量Boot####定义了各个启动项(####为4个十六进制大写符号)
用户选中某个启动项(或系统进入默认的启动)后,OS Loader启动,系统进入TSL阶段。
5、TSL阶段
TSL(Transient System Load)是操作系统加载器(OS Loader)执行的第一阶段,在这一阶段OS Loader
作为一个UEFI应用程序运行,系统资源仍然由UEFI内核控制。当启动服务ExitBootServices()服务被调用后系统进入
RunTime阶段。
TSL阶段之所以称为临时系统,在于它存在的目的就是为操作系统加载器准备执行环境。虽然是临时系统,但
其功能已经很强大,已经具备了操作系统的雏形,UEFI Shell是这个临时系统的人机交互界面。正常情况下 ,系统不会
进入UEFI Shell,而是直接执行操作系统加载器,只有在用户干预下或操作系统加载器遇到严重错误时才会进入UEFI Shell。
6、RT阶段
系统进入RT(Run Time)阶段后,系统的控制权从UEFI内核转交到OS Loader手中,UEFI占用的各种资源被回收到
OS Loader,仅有UEFI运行时服务保留给OS Loader和OS使用。随着OS Loader的执行,OS最终取得对系统的控制权。
7、AL阶段
在RT阶段,如果系统(硬件或软件)遇到灾难性错误,系统固件需要提供错误处理和灾难恢复机制,这种机制运行在
AL(After Life)阶段。UEFI和UEFI PI标准都没有定义此阶段的行为和规范。
1.SEC(Security Phase)阶段是平台初始化的第一个阶段,计算机系统加电后进入这个阶段。
(1)SEC阶段功能
UEFI系统开机或重启进入SEC阶段,从功能上说,它执行以下4种任务
1)接受并处理系统启动和重启信号:系统加电信号、系统重启信号、系统运行过程中的严重
异常信号
2)初始化临时存储区域:系统运行在SEC阶段时,仅CPU和CPU内部资源被初始化,各种外
部设备和内存都没有被初始化,因而系统需要一些临时RAM区域,用于代码和数据的存储,我们将之称
为临时RAM,以示与内存的区别。这些临时RAM只能位于CPU内部。最常用的临时RAM是Cache,当
Cache被配置为no--eviction模式时,可以作为内存使用,读命中时返回Cache中的数据,读缺失时不会向
主存发出缺失事件;写命中时讲数据写入Cache,写缺失时不会向主存发出缺失事件,这种技术称为CAR
(Cache As Ram)
3)作为可信系统的根:作为取得对系统控制权的第一部分,SEC阶段时整个可信系统的 根。SEC
能被系统信任,以后的各个阶段才有被信任的基础。通常,SEC在将控制权转移给PEI之前,课可以验证PEI
4)传递系统参数给下一阶段(即PEI):SEC阶段的一切工作都是为PEI阶段做准备,最终SEC要把
控制权转交给PEI,同时要将现阶段的成果汇报给PEI。汇报的手段就是讲如下信息作为参数传递给PEI的入口函数。
$系统当前状态,PEI可以根据这些状态判断系统的健康状况。
$可启动固件(Boot Fireware Volume)的地址和大小。
$临时RAM区域的地址和大小
$栈的地址和大小
(2)SEC阶段执行流程
上面介绍了SEC的功能,下面再来看看SEC的执行流程,如图所示:
以临时RAM初始化为界,SEC的执行又分为两大部分:临时 RAM生效之前称为Reset Vector
阶段,临时RAM生效后调用SEC入口函数从而进入SEC功能区
其中Reset Vector的执行流程如下:
1)进入固件入口
2)从实模式转换到32位平坦模式(包含模式)
3)定位固件中的BFV(Boot Firmware Volume)
4)定位BFV中的SEC映像
5)若是64位系统,从32位模式转换到64位模式
6)调用SEC入口函数
下面代码描述了从固件入口Reset Vector到SEC入口函数的执行过程
(EDK2 UEFICpuPkg/ResetVector/Vtf0/Ia16/ResetVectorVtf0.asm)
resetVector:
jmp short EarlyBspInitReal16
(EDK2 UEFICpuPkg/ResetVector/Vtf0/Ia16/Init16.asm )
EarlyBspInitReal16:
mov di, 'BP'
jmp short Main16
(EDK2 UefiCpuPkg/ResetVector/Vtf0/Main.asm)
Main16:
OneTimeCall EarlyInit16
OneTimeCall TransitionFromReal16To32BitFlat ; //从实模式转换到32位平坦模式
OneTimeCall Flat32SearchForBfvBase; //定位固件中的BFV
OneTimeCall Flat32SearchForSecEntryPoint; //定位BFV中的SEC镜像
//esi寄存器存放了SEC的入口地址,ebp寄存器存放了BFV起始地址
%ifdef ARCH_IA32
mov eax ,esp
jmp esi; 跳转到SEC入口
%else
OneTimeCall Transition32To64Flat; //从32位模式转换到64位模式
................
jmp rsi; //跳到SEC入口
%endif
在Reset Vector部分,因为系统还没有RAM,因而不能使用基于栈的程序设计
所有的函数调用都使用jmp指令模拟。OneTimeCall是宏,用于模拟call指令。例如宏调用
OneTimeCall EarlyInit16,如图:
进入SEC功能区后,首先利用CAR技术初始化栈,初始化IDT,初始化 EFI_SEC_PEI_HAND_OFF
将控制权转交给PEI,并讲EFI_SEC_PEI_HAND_OFF传递给PEI。
不同的硬件平台,SEC代码会有不同的实现方式,但大致执行过程相似。下面以OVMF为例,介绍SEC
功能区的执行过程。
2.PEI阶段
PEI(Pre-EFI Initialization)阶段资源仍然十分有限内存到了PEI后期才被初始化,其主要功能
是为DXE准备执行环境,将需要传递到DXE的信息组成HOB(Handoff Block)列表,最终将控制权转交
到DXE手中。PEI执行流程如图:
从功能上讲,PEI可分为以下两部分。
$PEI内核(PEI Foundation):负责PEI基础服务和流程
$PEIM(PEI Moudule)派遣器:主要功能是找出系统中所有 PEIM,并根据PEIM之间的依赖
关系按顺序执行PEIM。PEI阶段对系统的初始化主要由PEIM完成的。
每个PEIM是一个独立的模块,模块的入口函数类型定义如下:
typedef EFI_STATUS(EFIAPI *EFI_PEIM_ENTRY_POINT32(
IN EFI_PEI_FILE_HANDLE FileHandle,IN CONST EFI_PEI_SERVICE **PeiServices
)
通过PEIServices,PEIM可以使用PEI阶段提供的系统服务,通过这些系统服务,PEIM可以访问
PEI内核。PEIM之间的通信通过PPI(PEIM-to-PEIM Interfaces)完成。
PPI与DXE阶段的Protocol类似,每个PPI是一个结构体,包含了函数指针和变量,
例如:
struct _EFI_PEI_DECOMPRESS_PPI{
EFI_PEI_DECOMPRESS_DECOMPRESS Decompress;
}
extern EFI_GUID gEfiPeiDecompressPpiGuid;
每个PPI都有一个GUID。根据GUID,通过PeiServices的LocatePpi服务可以得到GUID对应的PPI实例
UEFI的一个重要特点是其模块化的设计。模块载入内存后生成Image。Image的的入口函数为
_ModuleEntryPoint。PEI也是一个模块,PEI Image的入口函数_ModuleEntryPoint,位于MdePkg/Library/PeimEntryPoint
/PeimEntryPoint.c。_ModuleEntryPoint最终调用PEI模块的入口函数PeiCore,位于MdePkg/Library/PeimEntryPoint/PerMain.c
进入PeiCore后,首先根据从SEC阶段传入的信息设置Pei Core Services,然后调用PeiDispatcher执行系统中的PEIM,当
内存初始化后,系统会发生栈切换并重新进入PeiCore。重新进入PeiCore后使用的内存为我们所熟悉的内存。所有PEIM都执行
完毕后,调用PeiServices的LocatePpi服务得到DXE IPL PPI,并调用DXE IPL PPI的Entry服务,这个Entry服务实际上是
DxeLoadCore,它找出DXE Image的入口函数,执行DXE image的入口函数并讲HOB列表传递给DXE。
3.DXE阶段
DXE(Driver Execution Environment)阶段执行大部分系统初始化工作,进入此阶段时,内存已经可以被完全使用,因而此阶段
可以进行大量的的复杂工作。从程序设计的角度讲,DXE阶段与PEI阶段相似,执行流程如下:
与PEI类似,从功能上讲,DXE可分为以下两部分。
$DXE内核:负责DXE基础服务和执行流程
$ DXE派遣器:负责调度执行DXE驱动,初始化系统设备
DXE提供的基础服务包括系统表、启动服务、Run Time Services。
每个DXE驱动是一个独立的模块,模块入口函数类型定义为:
typedef EFI_STATUS(EFIAPI *EFI_IMAGE_ENTRY_PINT)(
IN EFI_HANDLE ImageHandle,
IN EFI_SYSTEM_TABLE *SystemTable
);
DXE驱动之间通过Protocol通信。Protocol是一种特殊的结构体, 每个Protocol对应一个
GUID,利用系统BootServices的OpenProtocol,并根据GUID来打开对应的Protocol,进而使用这个
Protocol 提供的服务。
当所有的Driver都执行完毕后,系统完成初始化,DXE通过EFI_BDS_ARCH_PROTOCOL找到
BDS并调用BDS的入口函数,从而进入BDS阶段。从本质上讲,BDS是一种特殊的DXE阶段的应用程序。
4.BDS阶段
BDS(Boot Services Selection)的主要功能是执行启动策略,其主要功能包括:
$初始化控制台设备。
$ 加载必要的设备驱动。
$根据系统设置加载和执行启动项
如果加载启动项失败,系统讲重新执行DXE dispatcher以加载更多的驱动,然后重新尝试加载启动项。
BDS策略通过全局NVRAM变量配置。这些变量可以通过运行时服务GetVariable()读取,通过SetVariable()
设置。例如,变量BootOrder定义了启动顺序,变量Boot####定义了各个启动项(####为4个十六进制大写符号)
用户选中某个启动项(或系统进入默认的启动)后,OS Loader启动,系统进入TSL阶段。
5、TSL阶段
TSL(Transient System Load)是操作系统加载器(OS Loader)执行的第一阶段,在这一阶段OS Loader
作为一个UEFI应用程序运行,系统资源仍然由UEFI内核控制。当启动服务ExitBootServices()服务被调用后系统进入
RunTime阶段。
TSL阶段之所以称为临时系统,在于它存在的目的就是为操作系统加载器准备执行环境。虽然是临时系统,但
其功能已经很强大,已经具备了操作系统的雏形,UEFI Shell是这个临时系统的人机交互界面。正常情况下 ,系统不会
进入UEFI Shell,而是直接执行操作系统加载器,只有在用户干预下或操作系统加载器遇到严重错误时才会进入UEFI Shell。
6、RT阶段
系统进入RT(Run Time)阶段后,系统的控制权从UEFI内核转交到OS Loader手中,UEFI占用的各种资源被回收到
OS Loader,仅有UEFI运行时服务保留给OS Loader和OS使用。随着OS Loader的执行,OS最终取得对系统的控制权。
7、AL阶段
在RT阶段,如果系统(硬件或软件)遇到灾难性错误,系统固件需要提供错误处理和灾难恢复机制,这种机制运行在
AL(After Life)阶段。UEFI和UEFI PI标准都没有定义此阶段的行为和规范。