{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 sky.liu 的文章《操作系统实验报告 lab1》','https://www.xiaopingtou.net/article-58905.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
练习1
1.1 操作系统镜像文件 ucore.img 是如何一步一步生成的?(需要比较详细地解释 Makefile 中每一条相关命令和命令参数的含义,以及说明命令导致的结果)
利用make V= 查看执行了那些命令生成ucore.img的代码如下
$(UCOREIMG): $(kernel) $(bootblock)
$(V)dd if=/dev/zero of=$@ count=10000
$(V)dd if=$(bootblock) of=$@ conv=notrunc
$(V)dd if=$(kernel) of=$@ seek=1 conv=notrunc
$(call create_target,ucore.img)
输出如下图
![![enter description here][1]](data/attach/1904/d1innu1xb9sls9l1ta53ejubaclo0sps.jpg)
指令:由上描述可以看出,首先先创建一个大小为10000字节的块,然后再将bootblock,kernel拷贝过去。然而生成ucore.img需要先生成kernel和bootblock
dd:用指定大小的块拷贝一个文件,并在拷贝的同时进行指定的转换。
if=文件名:输入文件名,缺省为标准输入。即指定源文件。< if=input file >
of=文件名:输出文件名,缺省为标准输出。即指定目的文件。< of=output file >
count=blocks:仅拷贝blocks个块,块大小等于ibs指定的字节数。
conv=conversion:用指定的参数转换文件。
conv=notrunc:不截短输出文件
1.生成bootblock的相关代码如下
$(bootblock): $(call toobj,$(bootfiles)) | $(call totarget,sign)
@echo "========================$(call toobj,$(bootfiles))"
@echo + ld $@
$(V)$(LD) $(LDFLAGS) -N -e start -Ttext 0x7C00 $^ -o $(call toobj,bootblock)
@$(OBJDUMP) -S $(call objfile,bootblock) > $(call asmfile,bootblock)
@$(OBJCOPY) -S -O binary $(call objfile,bootblock) $(call outfile,bootblock)
@$(call totarget,sign) $(call outfile,bootblock) $(bootblock)
由上代码可得,到要生成bootblock,首先需要生成bootasm.o、bootmain.o、sign 下图是在编译时生成的中间文件

- 生成bootasm.o、bootmain.o、sign的相关代码为:
![![enter description here][3]](data/attach/1904/ht203k9wbcqj6gmw57fomv6n7aj7dza0.jpg)
其中相关参数的含义为:拷贝二进制代码bootblock.o到bootblock.out
ggdb 生成可供gdb使用的调试信息
-m32生成适用于32位环境的代码
-gstabs 生成stabs格式的调试信息
-nostdinc 不使用标准库
-fno-stack-protector 不生成用于检测缓冲区溢出的代码
-0s 位减小代码长度进行优化
objcopy -S -O binary obj/bootblock.o obj/bootblock.out
其中关键的参数为
-S 移除所有符号和重定位信息
-O 指定输出格式
使用sign工具处理bootblock.out,生成bootblock
bin/sign obj/bootblock.out bin/bootblock
kernel = $(call totarget,kernel)
$(kernel): tools/kernel.ld
$(kernel): $(KOBJS)
@echo + ld $@
$(V)$(LD) $(LDFLAGS) -T tools/kernel.ld -o $@ $(KOBJS)
@$(OBJDUMP) -S $@ > $(call asmfile,kernel)
@$(OBJDUMP) -t $@ | $(SED) '1,/SYMBOL TABLE/d; s/ .* / /; /^$$/d' > $(call symfile,kernel)
$(call create_target,kernel)
查看命令,生成kernel需要以下文件:
ld -m elf_i386 -nostdlib -T tools/kernel.ld -o bin/kernel obj/kern/init/init.o obj/kern/libs/readline.o obj/kern/libs/stdio.o obj/kern/debug/kdebug.o obj/kern/debug/kmonitor.o obj/kern/debug/panic.o obj/kern/driver/clock.o obj/kern/driver/console.o obj/kern/driver/intr.o obj/kern/driver/picirq.o obj/kern/trap/trap.o obj/kern/trap/trapentry.o obj/kern/trap/vectors.o obj/kern/mm/pmm.o obj/libs/printfmt.o obj/libs/string.o
1.2 一个被系统认为是符合规范的硬盘主引导扇区的特征是什么?
查看sign.c源代码buf[510] = 0x55;
buf[511] = 0xAA;
FILE *ofp = fopen(argv[2], "wb+");
size = fwrite(buf, 1, 512, ofp);
if (size != 512) {
fprintf(stderr, "write '%s' error, size is %d.
", argv[2], size);
return -1;
}
从上述代码可以看出,要求硬盘主引导扇区的大小是512字节,还需要第510个字节是0x55,第511个字节为0xAA,也就是说扇区的最后两个字节内容是0x55AA
练习2
题目要求:
从 CPU加电后执行的第一条指令开始,单步跟踪 BIOS的执行。
在初始化位置 0x7c00 设置实地址断点,测试断点正常。
从 0x7c00 开始跟踪代码运行,将单步跟踪反汇编得到的代码与 bootasm.S和 bootblock.asm进行比较。
自己找一个 bootloader或内核中的代码位置,设置断点并进行测试
2.1从 CPU加电后执行的第一条指令开始,单步跟踪 BIOS的执行。
1 修改 lab1/tools/gdbinit,内容为:set architecture i8086
target remote :1234
2.在 lab1目录下,执行make debug 执行命令如下图
 3.设置单步调试si
3.设置单步调试si 4.在gdb界面下,可通过如下命令来看BIOS的代码
x /2i $pc //显示当前eip处的汇编指令
 ### 2.2 在初始化位置0x7c00设置实地址断点,测试断点正常
### 2.2 在初始化位置0x7c00设置实地址断点,测试断点正常 在tools/gdbinit结尾加上
set architecture i8086 //设置当前调试的CPU是8086
b *0x7c00 //在0x7c00处设置断点。此地址是bootloader入口点地址,可看boot/bootasm.S的start地址处
c //continue简称,表示继续执行
x /2i $pc //显示当前eip处的汇编指令
set architecture i386 //设置当前调试的CPU是80386
 所以断点正常
所以断点正常
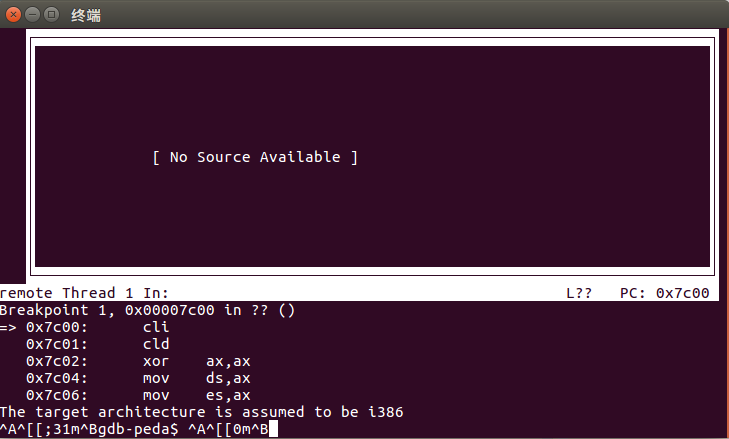
2.3 从0x7c00开始跟踪代码运行,将单步跟踪反汇编得到的代码与bootasm.S和 bootblock.asm进行比较
在tools/gdbinit结尾加上 b *0x7c00
c
x /10i $pc
在0x7c00处break,然后使用si和 x/i $pc 指令一行一行的跟踪,将得到的反汇编代码为:
0x00007c01 in ?? ()
(gdb) x/i $pc
=> 0x7c01: cld
(gdb) si
0x00007c02 in ?? ()
(gdb) x/i $pc
=> 0x7c02: xor %eax,%eax
(gdb) si
0x00007c04 in ?? ()
(gdb) x/i $pc
=> 0x7c04: mov %eax,%ds
(gdb)
bootblock.S 中的代码为:
.code16 # Assemble for 16-bit mode
cli # Disable interrupts
cld # String operations increment
# Set up the important data segment registers (DS, ES, SS).
xorw %ax, %ax # Segment number zero
movw %ax, %ds # -> Data Segment
movw %ax, %es # -> Extra Segment
movw %ax, %ss # -> Stack Segment
# Enable A20:
# For backwards compatibility with the earliest PCs, physical
# address line 20 is tied low, so that addresses higher than
# 1MB wrap around to zero by default. This code undoes this.
bootblock.asm
start:
.code16 # Assemble for 16-bit mode
cli # Disable interrupts
7c00: fa cli
cld # String operations increment
7c01: fc cld
# Set up the important data segment registers (DS, ES, SS).
xorw %ax, %ax # Segment number zero
7c02: 31 c0 xor %eax,%eax
movw %ax, %ds # -> Data Segment
7c04: 8e d8 mov %eax,%ds
movw %ax, %es # -> Extra Segment
7c06: 8e c0 mov %eax,%es
movw %ax, %ss # -> Stack Segment
7c08: 8e d0 mov %eax,%ss
观察发现他们相同
练习3
题目:从bootasm.s查看代码(在这里分析bootblock.asm也可以,二者源码相同),并分析过程
分析bootloader 进入保护模式的过程。
BIOS 将通过读取硬盘主引导扇区到内存,并转跳到对应内存中的位置执行 bootloader。请分析bootloader是如何完成从实模式进入保护模式的
宏定义
.set PROT_MODE_CSEG, 0x8 #内核代码段选择子
.set PROT_MODE_DSEG, 0x10 #内核数据段选择子
.set CR0_PE_ON, 0x1 #保护模式使能标志
1.关闭中断,将各个段寄存器重置
修改控制方向标志寄存器DF=0,使得内存地址从低到高增加它先将各个寄存器置0
#CPU刚启动为16位模式
cli # 关中断
cld # 清方向标志
xorw %ax, %ax # 置零
movw %ax, %ds # -> 数据段寄存器
movw %ax, %es # -> 附加段寄存器
movw %ax, %ss # -> 堆栈段寄存器
2 .开启A20
开启A20地址线之后,用来表示内存地址的位数变多了。开启前20位,开启后是32位。如果不开启A20地址线内存寻址最大只能找到1M,对于1M以上的地址访问会变成对address mod 1M地址的访问。通过将键盘控制器上的A20线置于高电位,全部32条地址线可用,可以访问4G的内存空间。打开A20地址线 为了兼容早期的PC机,第20根地址线在实模式下不能使用所以超过1MB的地址,默认就会返回到地址0,重新从0循环计数,下面的代码打开A20地址线 。
seta20.1:
inb $0x64, %al # 从0x64端口读入一个字节的数据到al中
testb $0x2, %al # test指令可以当作and指令,只不过它不会影响操作数
jnz seta20.1#如果上面的测试中发现al的第2位为0,就不执行该指令
否则就循环检查
movb $0xd1, %al # 将0xd1写入到al中
outb %al,$0x64 #将al中的数据写入到端口0x64中
seta20.2:
inb $0x64, %al
testb $0x2, %al
jnz seta20.2
movb $0xdf, %al # 通过0x60写入数据11011111 即将A20置1
outb %al, $0x60
初始化GDT表:一个简单的GDT表和其描述符已经静态储存在引导区中,载入即可
lgdt gdtdesc #将全局描述符表描述符加载到全局描述符表寄存器
进入保护模式:通过将cr0寄存器PE位置1便开启了保护模式
cr0中的第0位为1表示处于保护模式
cr0中的第0位为0,表示处于实模式
把控制寄存器cr0加载到eax中
movl %cr0, %eax
orl $CR0_PE_ON, %eax
movl %eax, %cr0
通过长跳转更新cs的基地址
ljmp $PROT_MODE_CSEG, $protcseg
.code32
protcseg:
设置段寄存器,并建立堆栈
movw $PROT_MODE_DSEG, %ax
movw %ax, %ds
movw %ax, %es
movw %ax, %fs
movw %ax, %gs
movw %ax, %ss
movl $0x0, %ebp
movl $start, %esp
转到保护模式完成,进入boot主方法
call bootmain
练习4
题目:bootmain 代码
分析bootloader加载ELF格式的OS的过程
1. bootloader如何读取硬盘扇区的?
2. bootloader是如何加载 ELF格式的 OS?
bootmain(void) {
readseg((uintptr_t)ELFHDR, SECTSIZE * 8, 0);
if (ELFHDR->e_magic != ELF_MAGIC) {
goto bad;
}
struct proghdr *ph, *eph;
ph = (struct proghdr *)((uintptr_t)ELFHDR + ELFHDR->e_phoff);
eph = ph + ELFHDR->e_phnum;
for (; ph < eph; ph ++) {
readseg(ph->p_va & 0xFFFFFF, ph->p_memsz, ph->p_offset);
}
((void (*)(void))(ELFHDR->e_entry & 0xFFFFFF))();
bad:
outw(0x8A00, 0x8A00);
outw(0x8A00, 0x8E00);
while (1);
}
readsect从设备的第secno扇区读取数据到dst位置
static void
readsect(void *dst, uint32_t secno) {
waitdisk();
outb(0x1F2, 1); // 设置读取扇区的数目为1
outb(0x1F3, secno & 0xFF);
outb(0x1F4, (secno >> 8) & 0xFF);
outb(0x1F5, (secno >> 16) & 0xFF);
outb(0x1F6, ((secno >> 24) & 0xF) | 0xE0);
// 上面四条指令联合制定了扇区号
// 在这4个字节线联合构成的32位参数中
// 29-31位强制设为1
// 28位(=0)表示访问"Disk 0"
// 0-27位是28位的偏移量
outb(0x1F7, 0x20); // 0x20命令,读取扇区
waitdisk();
insl(0x1F0, dst, SECTSIZE / 4); // 读取到dst位置,
// 幻数4因为这里以DW为单位
}
IO地址 功能加载ELF文件
0x1f0 读数据,当0x1f7不为忙状态时,可以读。
0x1f2 要读写的扇区数,每次读写前,你需要表明你要读写几个扇区。最小是1个扇区
0x1f3 如果是LBA模式,就是LBA参数的0-7位
0x1f4 如果是LBA模式,就是LBA参数的8-15位
0x1f5 如果是LBA模式,就是LBA参数的16-23位
0x1f6 第0~3位:如果是LBA模式就是24-27位 第4位:为0主盘;为1从盘
0x1f7 状态和命令寄存器。操作时先给命令,再读取,如果不是忙状态就从0x1f0端口读数据
bootmain(void) {
..........
if (ELFHDR->e_magic != ELF_MAGIC) {//这里有个判断
goto bad;
}
struct proghdr *ph, *eph;
//ELF头部有描述ELF文件应加载到内存什么位置的描述表,这里读取出来将之存入ph
ph = (struct proghdr *)((uintptr_t)ELFHDR + ELFHDR->e_phoff);
eph = ph + ELFHDR->e_phnum;
//按照程序头表的描述,将ELF文件中的数据载入内存
for (; ph < eph; ph ++) {
readseg(ph->p_va & 0xFFFFFF, ph->p_memsz, ph->p_offset);
((void (*)(void))(ELFHDR->e_entry & 0xFFFFFF))();//根据ELF头表中的入口信息,找到内核的入口并开始运行
bad:
..........
}
练习5
题目:
实现函数调用堆栈跟踪函数
什么是函数栈?
当函数被调用时,首先会把函数的参数依次入栈(这里指的是堆栈传参,当然也可以用寄存器传参)调用函数的栈底压栈到自己函数的栈中(push bp),然后将原来函数栈顶sp作为当前函数的栈底(mov bp,sp)。函数运行完成时,会将压入栈中的bp重新出栈到bp中(pop bp)。同时将计算的结果保存在寄存器中,返回原界面。 那么我们可以粗浅的建立一个栈模型ss:[ebp-8] ;变量2
ss:[ebp-4] ;变量1
ss:[ebp] ;栈针
ss:[ebp+4] ;返回地址
ss:[ebp+8] ;第一个参数
函数实现
read_ebp()和read_eip()函数来获取当前ebp寄存器和eip 寄存器的信息。 查看print_stackframe函数注释 /* LAB1 YOUR CODE : STEP 1 */
/* (1) call read_ebp() to get the value of ebp. the type is (uint32_t);
* (2) call read_eip() to get the value of eip. the type is (uint32_t);
* (3) from 0 .. STACKFRAME_DEPTH
* (3.1) printf value of ebp, eip
* (3.2) (uint32_t)calling arguments [0..4] = the contents in address (unit32_t)ebp +2 [0..4]
* (3.3) cprintf("
");
* (3.4) call print_debuginfo(eip-1) to print the C calling function name and line number, etc.
* (3.5) popup a calling stackframe
* NOTICE: the calling funciton's return addr eip = ss:[ebp+4]
* the calling funciton's ebp = ss:[ebp]
*/
for(i = 0; ebp!=0 && i < STACKFRAME_DEPTH; i++) {//STACKFRAME_DEPTH = 20 一直向上循环找到所有的调用函数为止,一开始没有判断栈针为空的条件
cprintf("ebp:0x%08x eip:0x%08x ",ebp, eip);
uint32_t *args = (uint32_t *)ebp + 2; //传参
for(j = 0; j < 4; j++)
cprintf("0x%08x ",args[j]);
cprintf("
");
print_debuginfo(eip-1);
//模拟函数执行完毕
eip = *((uint32_t *)ebp+1);//调用函数的返回地址
ebp = *((uint32_t *)ebp);//上一个函数的栈针
//循环直到没有调用函数停止
}
执行结果如下: 未加ebp!=0
 我们发现ebp的值在0x7bf8之后就为零了,这说明上面没有了调用函数,直接加个判断
我们发现ebp的值在0x7bf8之后就为零了,这说明上面没有了调用函数,直接加个判断 ebp!=0 就可以输出预期的结果。 加了ebp!=0
练习6
题目:
1.中断向量表中一个表项占多少字节?其中哪几位代表中断处理代码的入口?
2.请编程完善kern/trap/trap.c中对中断向量表进行初始化的函数idt_init。在idt_init函数中,依次对所有中断入口进行初始化。使用mmu.h中的SETGATE宏,填充idt数组内容。注意除了系统调用中断(T_SYSCALL)以外,其它中断均使用中断门描述符,权限为内核态权限;而系统调用中断使用异常,权限为陷阱门描述符。每个中断的入口由tools/vectors.c生成,使用trap.c中声明的vectors数组即可。
3.请编程完善trap.c中的中断处理函数trap在对时钟中断进行处理的部分填写trap函数中处理时钟中断的部分,使操作系统每遇到100次时钟中断后,调用 print_ticks子程序,向屏幕上打印一行文字100 ticks。
1.中断向量表中一个表项占多少字节?其中哪几位代表中断处理代码的入口?
中断向量表一个表项占用8字节,其中2-3字节是段选择子,0-1字节和6-7字节拼成位移,两者联合便是中断处理程序的入口地址。
中断描述符表中一个表项占8个字节,其中每个位的作用如图:
 其中015和4863分别为offset的低16位和高16位,16~31位是段选择子,通过段选择子得到段基址,再加上段内偏移量就可以得到中断处理代码的入口。
其中015和4863分别为offset的低16位和高16位,16~31位是段选择子,通过段选择子得到段基址,再加上段内偏移量就可以得到中断处理代码的入口。
2.请编程完善kern/trap/trap.c中对中断向量表进行初始化的函数idt_init
extern uintptr_t __vectors[];//声明__vertors[] You can use "extern uintptr_t __vectors[];" to define this extern variable which will be used later.
int i;
for(i=0;i<256;i++) {
SETGATE(idt[i],0,GD_KTEXT,__vectors[i],DPL_KERNEL);//对整个idt数组进行初始化
}
SETGATE(idt[T_SWITCH_TOK],0,GD_KTEXT,__vectors[T_SWITCH_TOK],DPL_USER);//在这里先把所有的中断都初始化为内核级的中断
lidt(&idt_pd);//使用lidt指令加载中断描述符表 just google it! and check the libs/x86.h to know more.利用google找到了相关函数
}
/*
传入的第一个参数gate是中断的描述符表
传入的第二个参数istrap用来判断是中断还是trap
传入的第三个参数sel的作用是进行段的选择
传入的第四个参数off表示偏移
传入的第五个参数dpl表示这个中断的优先级
*/
3.程完善trap.c中的中断处理函数trap在对时钟中断进行处理的部分填写trap函数中处理时钟中断的部分,使操作系统每遇到100次时钟中断后,调用 print_ticks子程序,向屏幕上打印一行文字100 ticks
实验代码填写 case IRQ_OFFSET + IRQ_TIMER:
/* LAB1 YOUR CODE : STEP 3 */
/* handle the timer interrupt */
/* (1) After a timer interrupt, you should record this event using a global variable (increase it), such as ticks in kern/driver/clock.c
* (2) Every TICK_NUM cycle, you can print some info using a funciton, such as print_ticks().
* (3) Too Simple? Yes, I think so!
*/
代码如下:
ticks++;
if(ticks%TICK_NUM == 0)//每次时钟中断之后ticks就会加一 当加到TICK_NUM次数时 打印并重新开始
print_ticks();//前面有定义 打印字符串
实验截图如下:
