{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 嘿嘿小啸天 的文章《使用CImg实现A4纸矫正》','https://www.xiaopingtou.net/article-59069.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
class="markdown_views prism-atom-one-light">

首先确定特征空间,这里选取了空间坐标x,y和 {MOD}彩空间r,g,b,在实际计算时,是将RGB转换到Lab空间。然后对图像中的每一个点,进行如下操作,对与它位置空间距离小于hr,颜 {MOD}空间距离小于hs的点求平均值,作为新的中心点。 重复这个步骤直到中心点不再移动或者到达最大迭代次数。此时的中心点就作为起始点的聚类中心,将中心点的像素值赋予初始点。



https://bbbbyang.github.io/2018/03/19/Mean-Shift-Segmentation/
图像分割
图像分割是一个聚类问题,将相似的点聚到一块。这里我采用了mean shift方法。主要分为三个部分:模点搜索,模点聚类(合并相似区域),合并小区域。模点搜索
首先确定特征空间,这里选取了空间坐标x,y和 {MOD}彩空间r,g,b,在实际计算时,是将RGB转换到Lab空间。然后对图像中的每一个点,进行如下操作,对与它位置空间距离小于hr,颜 {MOD}空间距离小于hs的点求平均值,作为新的中心点。 重复这个步骤直到中心点不再移动或者到达最大迭代次数。此时的中心点就作为起始点的聚类中心,将中心点的像素值赋予初始点。
do {
PtPrev = PtCur; // Set the original point and previous one
PtSum = Point5D(0, 0, 0, 0, 0); // Initial Sum vector
NumPts = 0; // Count number of points that satisfy the bandwidths
for (int hx = Left; hx < Right; hx++) {
for (int hy = Top; hy < Bottom; hy++) {
// Set point in the spatial bandwidth
Pt = Point5D(hx, hy, (float)Img(hx, hy, 0), (float)Img(hx, hy, 1), (float)Img(hx, hy, 2));
Pt.PointLab();
// Check it satisfied color bandwidth or not
if (Pt.MSPoint5DColorDistance(PtCur) < hr) {
PtSum.MSPoint5DAccum(Pt); // Accumulate the point to Sum vector
NumPts++; // Count
}
}
}
PtSum.MSPoint5DScale(1.0 / NumPts); // Scale Sum vector to average vector
PtCur = PtSum; // Get new origin point
step++; // One time end
// filter iteration to end
} while ((PtCur.MSPoint5DColorDistance(PtPrev) > MS_MEAN_SHIFT_TOL_COLOR) &&
(PtCur.MSPoint5DSpatialDistance(PtPrev) > MS_MEAN_SHIFT_TOL_SPATIAL) && (step < MS_MAX_NUM_CONVERGENCE_STEPS));
模点聚类
基本上就是区域生长,从某一点出发,如果和它附近的点8邻域)的颜 {MOD}值相似就合并,同时再从新合并的点出发继续合并下去,直到碰到不相似的点或者该点已经属于另一类了,此时,就退回来,直到退无可退(所有的8邻域搜索空间都已经搜索完毕)。// Region Growing 8 Neighbours
vector<Point5D> NeighbourPoints;
NeighbourPoints.push_back(PtCur);
while (!NeighbourPoints.empty()) {
Pt = NeighbourPoints.back();
NeighbourPoints.pop_back();
// Get 8 neighbours
for (int k = 0; k < 8; k++) {
int hx = Pt.x + dxdy[k][0];
int hy = Pt.y + dxdy[k][1];
if ((hx > 0) && (hy > 0) && (hx < ROWS) && (hy < COLS) && (Labels[hx][hy] < 0)) {
Point5D P(hx, hy, (float)Img(hx, hy, 0), (float)Img(hx, hy, 1), (float)Img(hx, hy, 2));
P.PointLab();
// Check the color
if (PtCur.MSPoint5DColorDistance(P) < hr) {
// Satisfied the color bandwidth
Labels[hx][hy] = label; // Give the same label
NeighbourPoints.push_back(P); // Push it into stack
MemberModeCount[label]++; // This region number plus one
// Sum all color in same region
Mode[label * 3 + 0] += P.l;
Mode[label * 3 + 1] += P.a;
Mode[label * 3 + 2] += P.b;
}
}
}
}
MemberModeCount[label]++; // Count the point itself
Mode[label * 3 + 0] /= MemberModeCount[label]; // Get average color
Mode[label * 3 + 1] /= MemberModeCount[label];
Mode[label * 3 + 2] /= MemberModeCount[label];
阶段效果:(右图对图像二值化)
A4纸矫正
获取角点
对每个像素,遍历它的8邻域,如果全为白 {MOD},就将它变为黑 {MOD},得到边缘图像。 auto res = grayscaled;
CImg_3x3(I, uchar);
cimg_for3x3(grayscaled, x, y,0,0,I,uchar) {
if (Ipp==255 &&Icp == 255 &&Inp == 255 &&Ipc == 255 &&Icc == 255
&&Inc == 255 &&Ipn == 255 &&Icn == 255 &&Inn == 255) {
res(x, y) = 0;
}
}
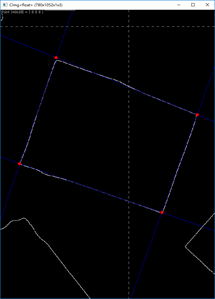
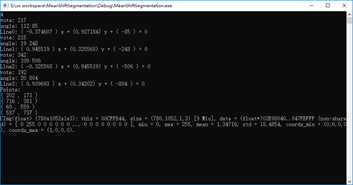
利用之前的霍夫变换,可以求出边缘的直线方程,并得到交点坐标。
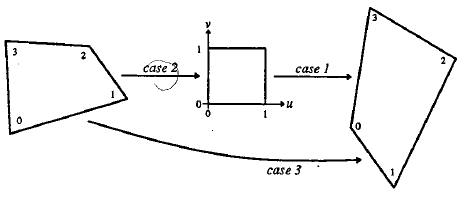
仿射变换
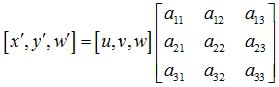
我们获得了角点的坐标,同时我们也知道它们对应矫正后矩形的四个顶点,利用仿射变换可以求出变换举证,然后我们根据结果图像的像素坐标利用插值获得原图对应像素值,并赋给结果图像就可以得到最终结果。
Hough hough("result/edge/2.bmp");
PerspectiveTransform temp;
PerspectiveTransform H = temp.quadrilateralToQuadrilateral(0, 0, 779, 0, 0, 1051, 779, 1051,
hough.points[2].x, hough.points[2].y, hough.points[0].x, hough.points[0].y,
hough.points[3].x, hough.points[3].y, hough.points[1].x, hough.points[1].y);
/* Method 1: Projective Transforming */
CImg<uchar> dest(780, 1052, 1, 3);
cimg_forXY(dest, x, y)
{
double denominator = H.a13 * x + H.a23 * y + H.a33;
double tx = (H.a11 * x + H.a21 * y + H.a31) / denominator;
double ty = (H.a12 * x + H.a22 * y + H.a32) / denominator;
//cout << tx << " " << ty << endl;
cimg_forC(dest,c)
dest(x, y, c) = src.linear_atXYZC(tx, ty,c);
}
最终结果
与canny算子的比较
对于较为简单和明显的边缘,比如A4纸,图像分割能够很好的获取到边缘,并且非常明确,干扰很少。但是canny算子能够获取到图像比较细腻的边缘,并且对于噪声有很好的抑制,计算也更快。代码地址
Github参考博客
http://www.voidcn.com/article/p-ukgueaom-th.htmlhttps://bbbbyang.github.io/2018/03/19/Mean-Shift-Segmentation/