vivado设计一:建立第一个入门工程(基于zybo)
0赞
发表于 2014/6/17 23:03:25 阅读(8777) 评论(4)
软件:vivado 2013.4
电脑:xp系统
硬件:zybo(基于xilinx 的zynq-7010主控芯片)
实验一:利用vivado建立一个嵌入式系统(之前用PlanAhead在zed实现过,现在换成vivado和zybo了,感受一下不同的地方)
启动vivado,建立新工程
选择next,填写工程名称和选择工程路径
Next,RTL工程走起:
Next,选择为verilog
连续三次Next,选择平台,这里我们使用的是zybo了:
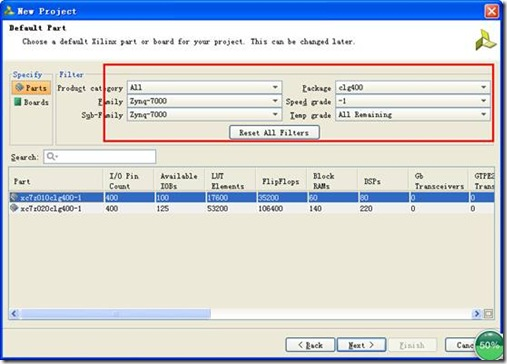
Next,然后finish,就建立了一个空的vivado工程
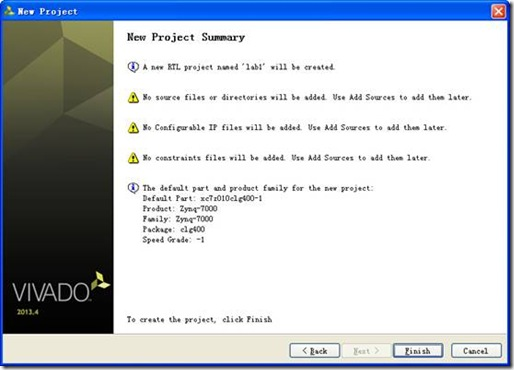
来到工程主界面:
Create Block Design
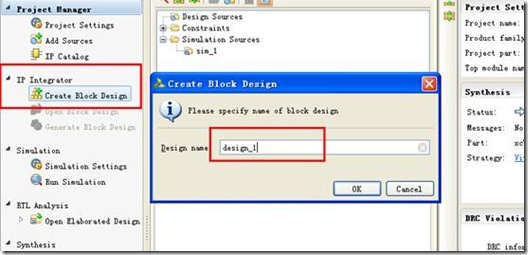
点击ok,Add IP
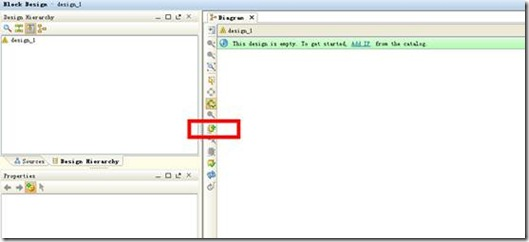
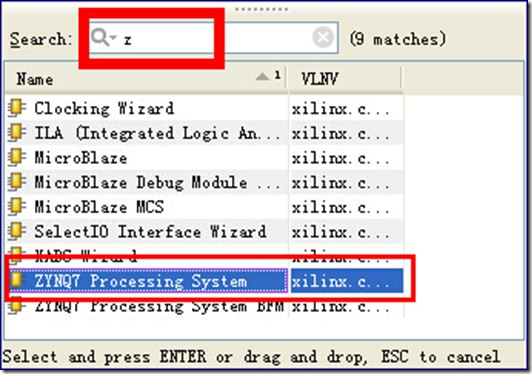
搜索z,选择红 {MOD}的zynq7 Processing System
双击zynq7 Processing System,点击Run Block Automation
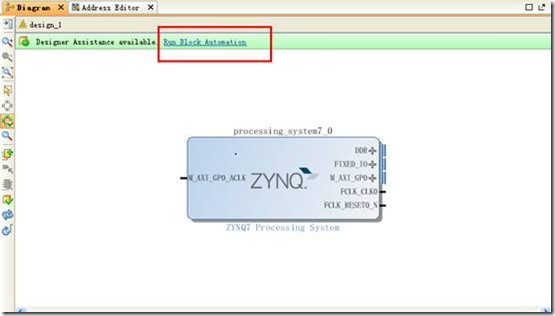
出现了:
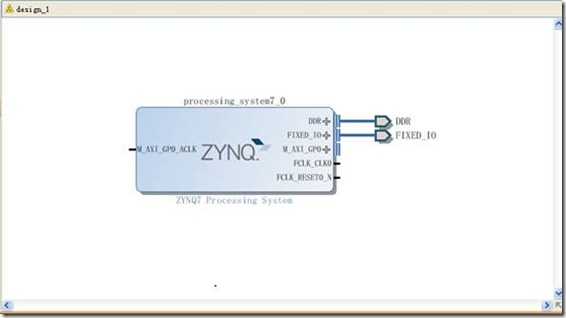
双击上面出现的图:添加配置文件:
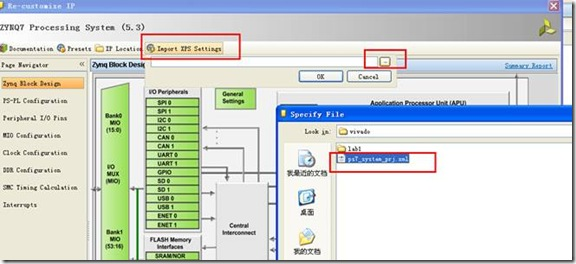
点击ok,回到界面,继续zynq7 Processing System
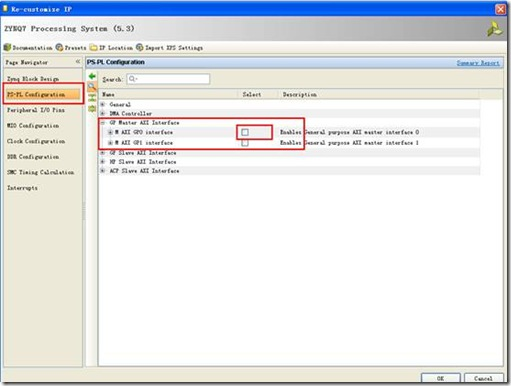
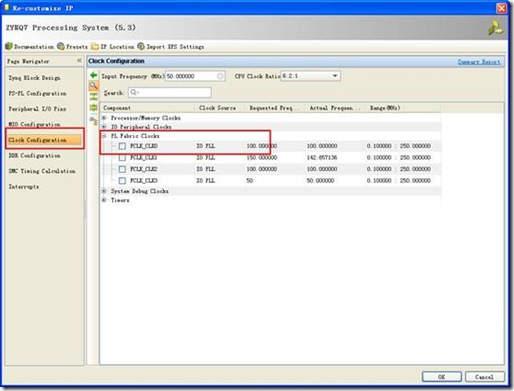
注意下面的非常重要只留下uart1:
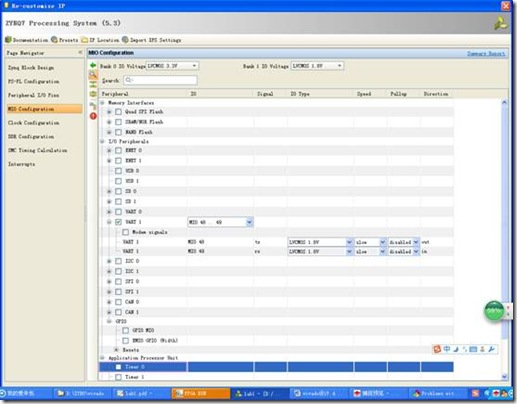
点击ok,回到主界面:
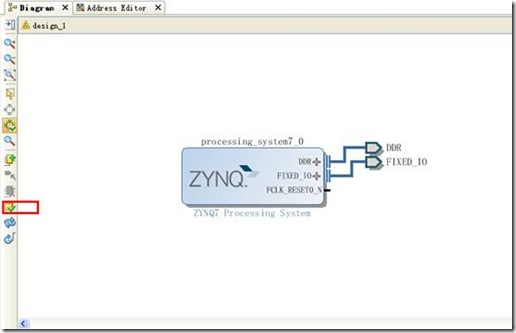
点击上述的validate design ,没有错误
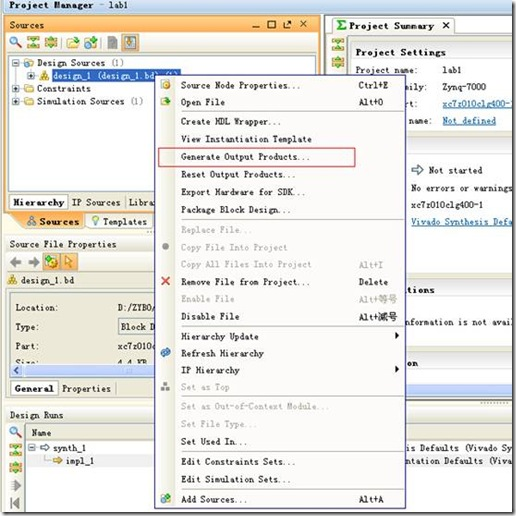
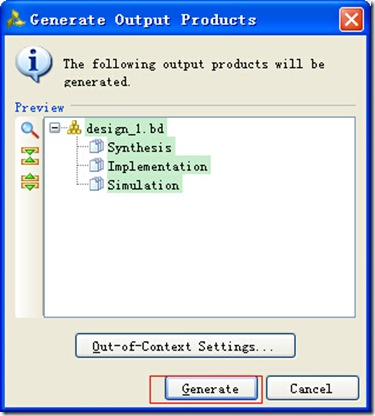
Generate
File->Export > Export hardware for SDK
建立应用程序工程
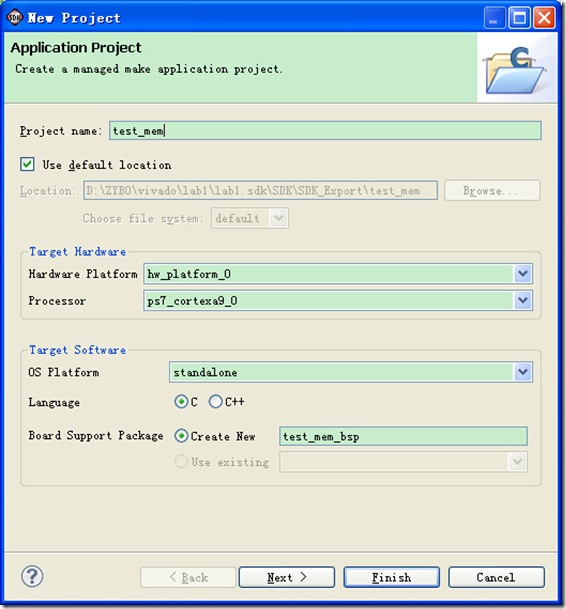
选择模板:
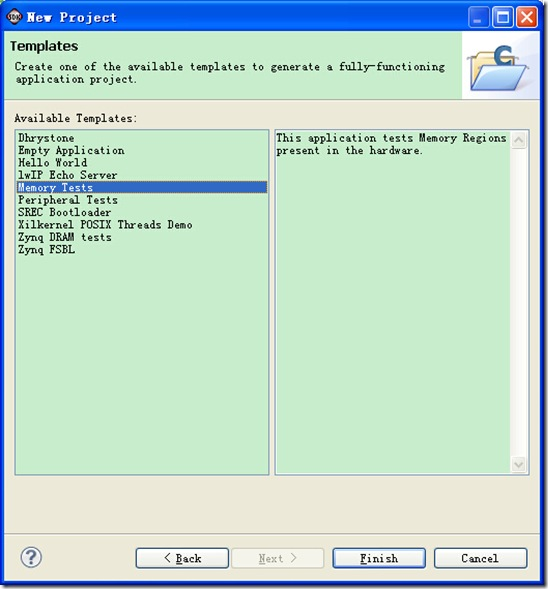
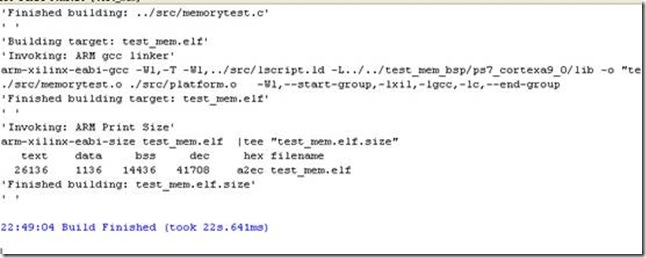
产生模板后,打开memorytest.c,在空白处按下个Enter,保存,这个时候就会重新编译,生成我们需要的elf文件:
好,在zybo上设置为JTAG启动,接好uart线,选择usb供电
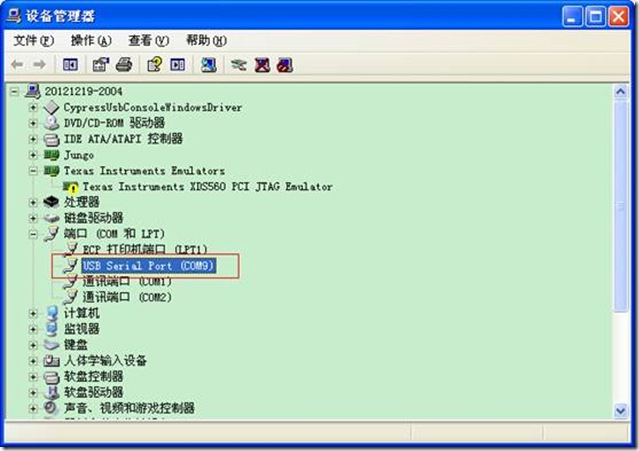
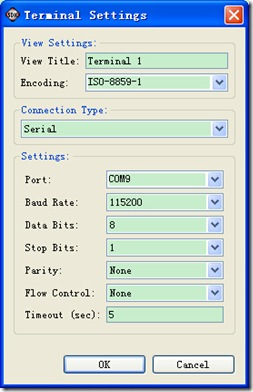
下载elf文件,可以看到信息如下:

zedboard--ps工程helloworld的建立
http://blog.chinaaet.com/detail/34607
vivado设计一:建立第一个入门工程(基于zybo)
http://blog.chinaaet.com/detail/35736
第一个是从ISE的PlanAhead从开始建立一个zynq的纯ps的工程
第二个是从vivado中直接建立的一个PS工程,这里都没有用到PL。
基本流程是差不多的,还无法体会vivado的强大之处,有待继续学习和发掘
转载:http://blog.chinaaet.com/xzy610030/p/35736
{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 forliang 的文章《vivado设计一:建立第一个入门工程(基于zybo)》','https://www.xiaopingtou.net/article-59385.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}