{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 wq11220209 的文章《旋转向量与旋转矩阵的相互转化》','https://www.xiaopingtou.net/article-59537.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
公式
1. 旋转向量求解旋转矩阵 当刚体在三维空间中运动时,如果已知旋转向量,根据罗德里格斯公式是比较容易求得旋转矩阵的.罗德里格斯公式如图所示
 其中,I 是单位矩阵,n 是旋转向量的单位向量, theta是旋转向量的模长.
2. 旋转矩阵求解旋转向量
其中,I 是单位矩阵,n 是旋转向量的单位向量, theta是旋转向量的模长.
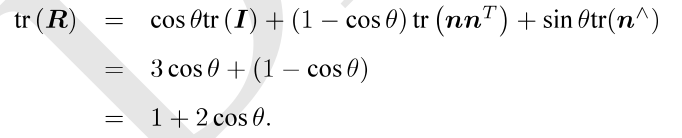
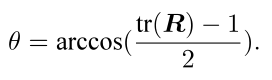
2. 旋转矩阵求解旋转向量如果已知旋转矩阵,求解旋转向量时,theta是比较容易求解的.根据上图,对等式两端取迹便可以得到旋转向量的模长
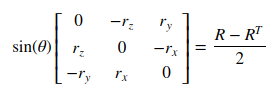
记旋转向量的单位向量为 r(rx, ry, rz) ,通过下图公式便可求解得出 r 向量的反对成矩阵,即可得出 r 向量
代码
这里用代码简单的求解一下#include
#include
using namespace std;
using namespace Eigen;
int main()
{
double angle = M_PI / 6.; //X轴向的转角
AngleAxisd angleAxisd(angle, Vector3d(1, 0, 0));
{
cout << "根据旋转向量求解旋转矩阵..." << endl;
double theta = angleAxisd.angle();
Vector3d n = angleAxisd.axis();
cout<< "theta is " << theta << endl;
cout<< "n is " << n << endl;
Matrix3d n_hat;
n_hat << 0, -n[2], n[1],
n[2], 0, -n[0],
-n[1], n[0], 0;
Matrix3d R_solved = cos(theta) * Matrix3d::Identity() + (1 - cos(theta)) * n * n.transpose() + sin(theta) * n_hat;
cout << "R_solved is " << R_solved << endl;
}
用OpenCV Documention上的方法求解旋转向量点击此处搜索Rodrigues
{
cout<< "根据旋转矩阵求解旋转向量..." << endl;
Matrix3d R = angleAxisd.toRotationMatrix();
double theta = acos((R.trace() - 1) * 0.5); //待求的旋转向量的模长
Matrix3d Right = (R - R.transpose()) * 0.5 / sin(theta);
Vector3d r; //待求的旋转向量的单位向量
r[0] = (Right(2,1) - Right(1,2))*0.5;
r[1] = (Right(0,2) - Right(2,0))*0.5;
r[2] = (Right(1,0) - Right(0,1))*0.5;
cout<<"angle is "<
用求特征值为1对应的特征向量方法求解旋转向量
{
cout<< "根据旋转矩阵求解旋转向量..." << endl;
//此处RR和n是相互对应的,用所求的旋转单位向量同n对比验证
Matrix3d RR;
RR << -0.036255, 0.978364, -0.203692,
0.998304,0.026169, -0.051994,
-0.045539,-0.205232,-0.977653;
Vector3d n(-2.100418,-2.167796,0.273330);
double theta = acos((RR.trace() - 1) * 0.5);
EigenSolver solver(RR);
Matrix3cd vectors = solver.eigenvectors();
Vector3cd values = solver.eigenvalues();
cout<<"vectors is "<()*x<