{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 zyh215 的文章《旋转编码器与PIC单片机接口》','https://www.xiaopingtou.net/article-59888.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
转载于www.viadean.com
旋转编码器 是一种输入装置,其帮助用户与系统进行交互。它看起来更像是一个无线电电位器旋转编码器是一种输入设备, 可帮助用户与系统交互。它看起来更像是一个无线电电位器, 但它输出一系列脉冲, 这使得它的应用独特。当编码器的旋钮旋转时, 它以小步的形式旋转, 这有助于它用于 stepper/servo 电机控制。 在本文中,我们将了解不同类型的旋转编码器及其工作原理。我们还将它与PIC单片机PIC16F877A连接,并通过旋转编码器控制整数值,并在16 * 2 LCD屏幕上显示其值。在本教程的最后, 您将会很乐意为您的项目使用旋转编码器。所以让我们开始吧…。 旋转编码器及其类型 旋转编码器通常称为轴编码器。它是一个机电传感器, 这意味着它将机械运动转换为电子脉冲, 或者换句话说, 它将角度位置或运动或轴位置转换为数字或模拟信号。它由一个旋钮组成, 当旋转时, 它将逐步移动, 并产生每个步骤具有预定宽度的脉冲列车序列。 市场上有很多种类型的旋转编码器, 设计师可以根据自己的应用选择一种。下面列出了最常见的类型 增量编码器 绝对编码器 磁性编码器 光学编码器 激光编码器 这些编码器是基于输出信号和传感技术进行分类的, 增量编码器和绝对编码器是根据输出信号进行分类的, 磁编码器和激光编码器是基于传感技术进行分类的。此处使用的编码器是增量类型的编码器。 绝对编码器即使在断电后也会存储位置信息, 当我们再次对其通电时, 位置信息也会可用。 另一种基本类型, 增量编码器提供数据时, 编码器更改它的位置。它无法存储仓位信息。 ky-040 旋转编码器夹头及说明 ky-040 增量型旋转编码器的针脚如下所示。在这个项目中, 我们将与来自微芯片的流行微控制器 pic16f877a 接口这个旋转编码器。

前两个引脚 (接地和 vcc) 用于为编码器供电, 通常使用 + 5v 电源。除了以顺时针和逆时针方向旋转旋钮外, 编码器还具有一个开关 (活动低), 可通过按内旋钮进行按压。此开关的信号是通过引脚 3 (sw) 获得的。最后, 它有两个输出引脚 (dt 和 clk), 产生波形, 如下所述。我们以前把这个旋转编码器与 arduino 接口过。 旋转编码器的工作原理 输出完全取决于内部铜垫, 提供与 gnd 和 vcc 与轴的连接。

旋转编码器有两个部分。轴轮, 它与轴连接, 并根据轴的旋转和完成电气连接的底座顺时针或逆时针旋转。基座具有连接到 dt 或 clk 的端口或点, 这样当轴轮旋转时, 它将连接基点, 并在 dt 和 clk 端口上提供方波。 输出将像轴旋转时

两个端口提供方波,但时序略有不同。因此,如果我们接受输出为1和0,则只能有四个状态,0 0,1 0,1 1,0 1.二进制输出的序列决定顺时针转动或逆时针转动。例如,如果旋转编码器在空闲状态下提供1 0并在此之后提供1 1,则意味着编码器将其位置向顺时针方向改变一步,但如果在空闲1 0之后提供0 0,则意味着轴一步一步地沿逆时针方向转动其位置。
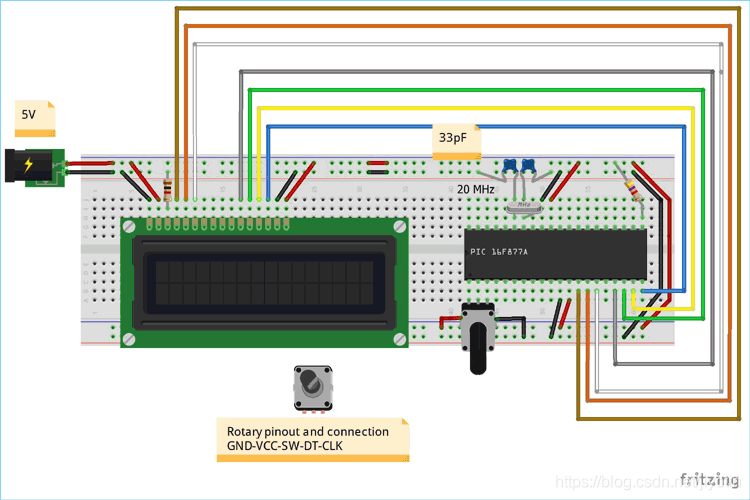
所需组件 现在是确定我们需要什么接口旋转编码器与 pic 微控制器的时候了, PIC16F877A 电阻器 1k电阻器 10k 4.7k电容器33pF陶瓷圆盘电容器 - 2个 20Mhz晶体 16x2显示 旋转编码器 5V适配器。 面包板 连接线。 PIC16F877A旋转编码器接口电路图
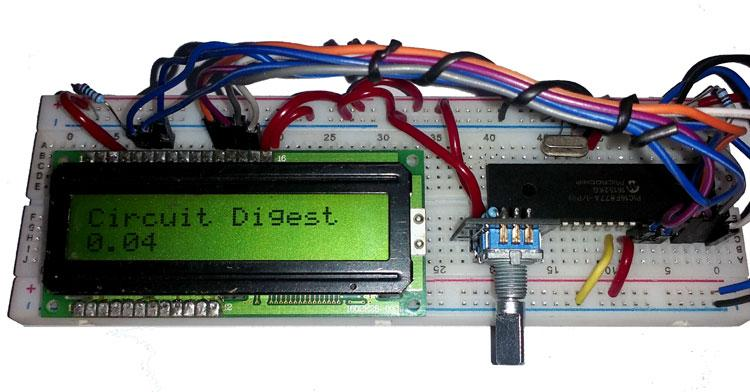
 下面是根据电路图连接组件后的最终设置图:
下面是根据电路图连接组件后的最终设置图:

 我们使用单个1K电阻来代替LCD的对比度,而不是使用电位计。
代码说明
完整的PIC代码 在本项目的最后给出了 演示视频,这里我们将解释代码的一些重要部分。如果您是PIC微控制器的就遵循我们的 新手,请PIC教程 从一开始。
正如我们之前讨论的那样,我们需要 检查输出并区分DT和CLK的二进制输出,因此我们创建了一个 if-else为操作部分。
我们使用单个1K电阻来代替LCD的对比度,而不是使用电位计。
代码说明
完整的PIC代码 在本项目的最后给出了 演示视频,这里我们将解释代码的一些重要部分。如果您是PIC微控制器的就遵循我们的 新手,请PIC教程 从一开始。
正如我们之前讨论的那样,我们需要 检查输出并区分DT和CLK的二进制输出,因此我们创建了一个 if-else为操作部分。
旋转编码器 是一种输入装置,其帮助用户与系统进行交互。它看起来更像是一个无线电电位器旋转编码器是一种输入设备, 可帮助用户与系统交互。它看起来更像是一个无线电电位器, 但它输出一系列脉冲, 这使得它的应用独特。当编码器的旋钮旋转时, 它以小步的形式旋转, 这有助于它用于 stepper/servo 电机控制。 在本文中,我们将了解不同类型的旋转编码器及其工作原理。我们还将它与PIC单片机PIC16F877A连接,并通过旋转编码器控制整数值,并在16 * 2 LCD屏幕上显示其值。在本教程的最后, 您将会很乐意为您的项目使用旋转编码器。所以让我们开始吧…。 旋转编码器及其类型 旋转编码器通常称为轴编码器。它是一个机电传感器, 这意味着它将机械运动转换为电子脉冲, 或者换句话说, 它将角度位置或运动或轴位置转换为数字或模拟信号。它由一个旋钮组成, 当旋转时, 它将逐步移动, 并产生每个步骤具有预定宽度的脉冲列车序列。 市场上有很多种类型的旋转编码器, 设计师可以根据自己的应用选择一种。下面列出了最常见的类型 增量编码器 绝对编码器 磁性编码器 光学编码器 激光编码器 这些编码器是基于输出信号和传感技术进行分类的, 增量编码器和绝对编码器是根据输出信号进行分类的, 磁编码器和激光编码器是基于传感技术进行分类的。此处使用的编码器是增量类型的编码器。 绝对编码器即使在断电后也会存储位置信息, 当我们再次对其通电时, 位置信息也会可用。 另一种基本类型, 增量编码器提供数据时, 编码器更改它的位置。它无法存储仓位信息。 ky-040 旋转编码器夹头及说明 ky-040 增量型旋转编码器的针脚如下所示。在这个项目中, 我们将与来自微芯片的流行微控制器 pic16f877a 接口这个旋转编码器。
前两个引脚 (接地和 vcc) 用于为编码器供电, 通常使用 + 5v 电源。除了以顺时针和逆时针方向旋转旋钮外, 编码器还具有一个开关 (活动低), 可通过按内旋钮进行按压。此开关的信号是通过引脚 3 (sw) 获得的。最后, 它有两个输出引脚 (dt 和 clk), 产生波形, 如下所述。我们以前把这个旋转编码器与 arduino 接口过。 旋转编码器的工作原理 输出完全取决于内部铜垫, 提供与 gnd 和 vcc 与轴的连接。
旋转编码器有两个部分。轴轮, 它与轴连接, 并根据轴的旋转和完成电气连接的底座顺时针或逆时针旋转。基座具有连接到 dt 或 clk 的端口或点, 这样当轴轮旋转时, 它将连接基点, 并在 dt 和 clk 端口上提供方波。 输出将像轴旋转时
两个端口提供方波,但时序略有不同。因此,如果我们接受输出为1和0,则只能有四个状态,0 0,1 0,1 1,0 1.二进制输出的序列决定顺时针转动或逆时针转动。例如,如果旋转编码器在空闲状态下提供1 0并在此之后提供1 1,则意味着编码器将其位置向顺时针方向改变一步,但如果在空闲1 0之后提供0 0,则意味着轴一步一步地沿逆时针方向转动其位置。
所需组件 现在是确定我们需要什么接口旋转编码器与 pic 微控制器的时候了, PIC16F877A 电阻器 1k电阻器 10k 4.7k电容器33pF陶瓷圆盘电容器 - 2个 20Mhz晶体 16x2显示 旋转编码器 5V适配器。 面包板 连接线。 PIC16F877A旋转编码器接口电路图
下面是根据电路图连接组件后的最终设置图:
我们使用单个1K电阻来代替LCD的对比度,而不是使用电位计。
代码说明
完整的PIC代码 在本项目的最后给出了 演示视频,这里我们将解释代码的一些重要部分。如果您是PIC微控制器的就遵循我们的 新手,请PIC教程 从一开始。
正如我们之前讨论的那样,我们需要 检查输出并区分DT和CLK的二进制输出,因此我们创建了一个 if-else为操作部分。
if (Encoder_CLK != position){
if (Encoder_DT != position){
// lcd_com (0x01);
counter++; // Increase the counter which will be printed on the lcd
lcd_com (0xC0);
lcd_puts(" ");
lcd_com (0xC0);
lcd_bcd(1,counter);
}
else{
// lcd_com (0x01);
lcd_com (0xC0);
counter--; // decrease the counter
lcd_puts(" ");
lcd_com (0xC0);
lcd_bcd(1,counter);
//lcd_puts("Left");
}
}
我们还需要在每一步上存储位置。为此, 我们使用了一个存储当前位置的变量 “position”。
position = Encoder_CLK; // It is to store the encoder clock position on the variable. Can be 0 or 1
除此之外,还提供了一个选项,用于 通知开关按压LCD上的。
if (Encoder_SW == 0)
{
sw_delayms(20); //debounce delay
if (Encoder_SW == 0)
{ //lcd_com(1);
//lcd_com(0xC0);
lcd_puts ("switch pressed");
// itoa(counter, value, 10);
// lcd_puts(value);
}
}
系统 _ init 函数用于初始化引脚 ito 操作、lcd 和存储旋转编码器位置。
void system_init()
{
TRISB = 0x00; // PORT B as output, This port is used for LCD
TRISDbits.TRISD2 = 1;
TRISDbits.TRISD3 = 1;
TRISCbits.TRISC4 = 1;
lcd_init(); // This will Initialize the LCD
position = Encoder_CLK;// Sotred the CLK position on system init, before the while loop start.
}
lcd 功能写在 lcd. h 库上, 其中声明了 lcd _ put ()、lcd _ cmd ()。
完整代码:
/*
* File: main.c
* Author: Sourav Gupta
*
* Created on 18 Dec 2018, 18:57
*/
/*
* Configuration Related settings. Specific for microcontroller unit.
*/
#pragma config FOSC = HS // Oscillator Selection bits (HS oscillator)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = OFF // Power-up Timer Enable bit (PWRT disabled)
#pragma config BOREN = ON // Brown-out Reset Enable bit (BOR enabled)
#pragma config LVP = OFF // Low-Voltage (Single-Supply) In-Circuit Serial Programming Enable bit (RB3/PGM pin has PGM function; low-voltage programming enabled)
#pragma config CPD = OFF // Data EEPROM Memory Code Protection bit (Data EEPROM code protection off)
#pragma config WRT = OFF // Flash Program Memory Write Enable bits (Write protection off; all program memory may be written to by EECON control)
#pragma config CP = OFF // Flash Program Memory Code Protection bit (Code protection off)
#define _XTAL_FREQ 20000000
/*
* System Header files inclusions
*/
#include
//#include
#include
#include "supporting c files/lcd.h"
#define Encoder_SW PORTDbits.RD2
#define Encoder_DT PORTDbits.RD3
#define Encoder_CLK PORTCbits.RC4
/*
* Program flow related functions
*/
int counter; // It will hold the count of rotary encoder.
int position; // It will store the rotary encoder position.
void sw_delayms(unsigned int d);
int value[7];
/*
* System Init Function
*/
void system_init ();
/* Main function single Thread*/
void main(void) {
system_init();
lcd_puts ("Circuit Digest");
lcd_com(0xC0);
counter = 0;
while(1){
lcd_com(0xC0);
if (Encoder_SW == 0){
sw_delayms(20);
if (Encoder_SW == 0){
//lcd_com(1);
//lcd_com(0xC0);
lcd_puts ("switch pressed");
// itoa(counter, value, 10);
// lcd_puts(value);
}
}
if (Encoder_CLK != position){
if (Encoder_DT != position){
// lcd_com (0x01);
counter++;
lcd_com (0xC0);
lcd_puts(" ");
lcd_com (0xC0);
lcd_bcd(1,counter);
}
else{
// lcd_com (0x01);
lcd_com (0xC0);
counter--;
lcd_puts(" ");
lcd_com (0xC0);
lcd_bcd(1,counter);
//lcd_puts("Left");
}
}
position = Encoder_CLK;
}
return;
}
void sw_delayms(unsigned int d){
int x, y;
for(x=0;x