{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 testingphone 的文章《PIC单片机之EUSART串行通信接口》','https://www.xiaopingtou.net/article-60048.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
PIC 单片机的EUSART是一种串行通信接口,我们可以利用他让不同设备之间传输数据,我们来讲讲我们最常用的串行异步接收和发送。
管脚
串行异步接收和发送。如果只要两个引脚,一个是接收RX 一个是发送TX。
数据格式
我们先来讲讲TX是如何发送出数据的,数据格式具体是什么样的。
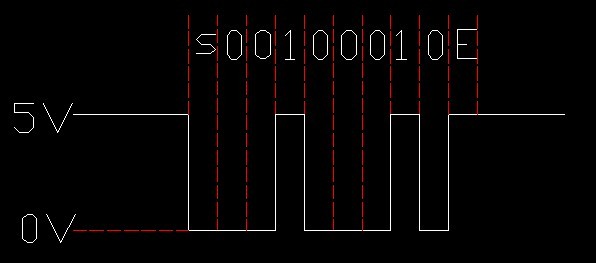
 如果我们要向其他设备发送个大写字母A。将是什么样的呢。"A"这个字母对应的ASCII码是65,对应的八位二进制数则是 01000100。TX就将对应的二进制码发送出去。
发送时用高电平来代表1,用低电平代表0. 那不发送数据的时候管脚就一直为高电平。
启动位和停止位
怎么区分现在是在发送数据还是在常态呢?所以在每次发送一个字节的数据之前TX脚都会先输出一小段的低电平。来告诉对方,我要发送数据了这一小段低电平便是启动位(起始位)。
如果我们发送的不仅仅只有一个字节,而是好几个字节,两个数据之间总要有个间隔吧!要不然分不清谁跟谁。所以每发送完一个字节的数据,TX脚就会输出一小段的高电平这便是停止位。
波特率
在数据发送中每个位的时间都要事先定好,而且发送和接收的双方都必须事先知道并设置好。那这个时间是怎么确定的呢?这就牵扯的一个东西波特率。在这里波特率=比特率。比特率也就是 一秒钟发送多少位的数据。如果要一秒钟发送为9600个位,我们将波特率设置为9600。1/9600约等于0.0001s 也就是每个位的发送时间。
小端发送
如果 发送大写字母“ A ”也就是发送二进制数 “01000100”,串行通信是从低位开始发送。
下图为字母”A”数据发送的时序图.
如果我们要向其他设备发送个大写字母A。将是什么样的呢。"A"这个字母对应的ASCII码是65,对应的八位二进制数则是 01000100。TX就将对应的二进制码发送出去。
发送时用高电平来代表1,用低电平代表0. 那不发送数据的时候管脚就一直为高电平。
启动位和停止位
怎么区分现在是在发送数据还是在常态呢?所以在每次发送一个字节的数据之前TX脚都会先输出一小段的低电平。来告诉对方,我要发送数据了这一小段低电平便是启动位(起始位)。
如果我们发送的不仅仅只有一个字节,而是好几个字节,两个数据之间总要有个间隔吧!要不然分不清谁跟谁。所以每发送完一个字节的数据,TX脚就会输出一小段的高电平这便是停止位。
波特率
在数据发送中每个位的时间都要事先定好,而且发送和接收的双方都必须事先知道并设置好。那这个时间是怎么确定的呢?这就牵扯的一个东西波特率。在这里波特率=比特率。比特率也就是 一秒钟发送多少位的数据。如果要一秒钟发送为9600个位,我们将波特率设置为9600。1/9600约等于0.0001s 也就是每个位的发送时间。
小端发送
如果 发送大写字母“ A ”也就是发送二进制数 “01000100”,串行通信是从低位开始发送。
下图为字母”A”数据发送的时序图.
 实例:我们可以利用PC机的串口和单片机进行异步串行通信,单片机接收到什么样的数据,就在给PC机发送数据,波特率为115200。不过单片机输出的TTL信号,需TTL转232.PC机才能接收。有关这方面的硬件设计网上很多故不赘述。
在官方的数据手册有对应配置步骤,不过我将根据我的实例来讲解其实也是大同小异。
1,配置端口
1.1配置备用功能
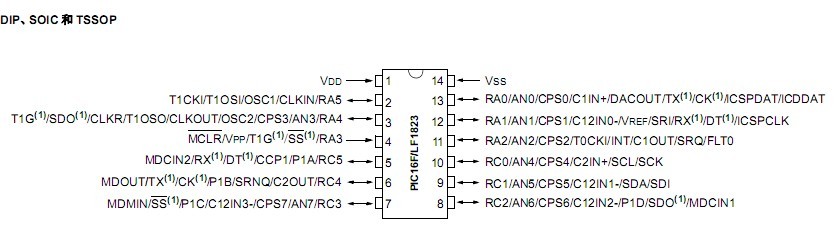
我们可以看单片机的引脚图,第13和第6脚都标有TX说明这两个引脚是可以作为EUSART数据输出。第12和第5脚都标有RX说明这两个引脚是都可以作为EUSART数据输入的。但是同时只有一个引脚作为RX或者TX。不可以同时有两个RX或TX。RX与TX的选择是通过APFCON。我们这里选择13脚作为TX,选择12脚作为RX.配置如下:
APFCONbits.TXCKSEL = 1;//RA0
APFCONbits.RXDTSEL = 1;//RA1
实例:我们可以利用PC机的串口和单片机进行异步串行通信,单片机接收到什么样的数据,就在给PC机发送数据,波特率为115200。不过单片机输出的TTL信号,需TTL转232.PC机才能接收。有关这方面的硬件设计网上很多故不赘述。
在官方的数据手册有对应配置步骤,不过我将根据我的实例来讲解其实也是大同小异。
1,配置端口
1.1配置备用功能
我们可以看单片机的引脚图,第13和第6脚都标有TX说明这两个引脚是可以作为EUSART数据输出。第12和第5脚都标有RX说明这两个引脚是都可以作为EUSART数据输入的。但是同时只有一个引脚作为RX或者TX。不可以同时有两个RX或TX。RX与TX的选择是通过APFCON。我们这里选择13脚作为TX,选择12脚作为RX.配置如下:
APFCONbits.TXCKSEL = 1;//RA0
APFCONbits.RXDTSEL = 1;//RA1
 1.2将RX脚配置位数字输入。
我们可以看第12脚上标有AN1,说明该引脚还带有模拟输入的功能。所以我们必须将其设置为数字输入。配置如下:
TRISA1 = 1;//RA1 RX input
ANSELAbits.ANSA1=0;
2 配置波特率
如何设置波特率为115200呢,这里我们必须先要知道计算公式。在官方的数据手册中有给我们提供表格。到底选择那个公式由SYNC,BRG16,BRGH这三个位的配置决定。
我们选在异步通信模式故SYNC为0;
波特率发生器位,可以选择8位或者16位。不过选择16位。波特率的精度会更高。所以选择16位。BRG16为1.
我们这里选择高速的波特率BRGH为1;
配置如下:
TXSTAbits.BRGH =1; //high speed
BAUDCONbits.BRG16 =1; //16bit Baud rate Generator is used
TXSTAbits.SYNC =0; //Asynchronous mode
1.2将RX脚配置位数字输入。
我们可以看第12脚上标有AN1,说明该引脚还带有模拟输入的功能。所以我们必须将其设置为数字输入。配置如下:
TRISA1 = 1;//RA1 RX input
ANSELAbits.ANSA1=0;
2 配置波特率
如何设置波特率为115200呢,这里我们必须先要知道计算公式。在官方的数据手册中有给我们提供表格。到底选择那个公式由SYNC,BRG16,BRGH这三个位的配置决定。
我们选在异步通信模式故SYNC为0;
波特率发生器位,可以选择8位或者16位。不过选择16位。波特率的精度会更高。所以选择16位。BRG16为1.
我们这里选择高速的波特率BRGH为1;
配置如下:
TXSTAbits.BRGH =1; //high speed
BAUDCONbits.BRG16 =1; //16bit Baud rate Generator is used
TXSTAbits.SYNC =0; //Asynchronous mode
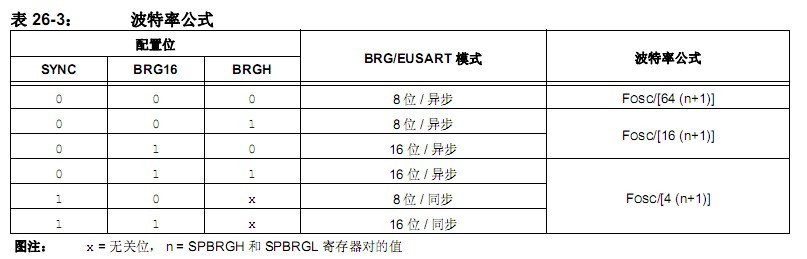 我们可以得出我们的计算公式为 波特率=FOSC/[4(n+1)];
我们的波特率为115200,时钟定为32MHz。计算出n的值。
115200=32MHz/[4(n+1)];可以得到n=68.444 即n=0x44;
将0x44存入到SPBRGH和SPBRGL中,配置如下
SPBRGH = 0x00;//
SPBRGL = 0x44;// Baud rate 115200
3,配置接收中断
实际可以根据自己的需求配置是否用中断接收。不过这里设置为中断接收,配置如下。
PIE1bits.RCIE = 1; //enables the USART Receive interrupt
INTCONbits.PEIE = 1;
INTCONbits.GIE = 1;
4,开启串口的功能
开启接收,开启发送,开启串口功能,配置如下:
RCSTAbits.CREN = 1;//Enables receiver
TXSTAbits.TXEN = 1;//Transmit enabled
RCSTAbits.SPEN =1; //serial port enable
实例代码:单片机型PIC16LF1823,开发环境MPLAB X IDE.
#include
我们可以得出我们的计算公式为 波特率=FOSC/[4(n+1)];
我们的波特率为115200,时钟定为32MHz。计算出n的值。
115200=32MHz/[4(n+1)];可以得到n=68.444 即n=0x44;
将0x44存入到SPBRGH和SPBRGL中,配置如下
SPBRGH = 0x00;//
SPBRGL = 0x44;// Baud rate 115200
3,配置接收中断
实际可以根据自己的需求配置是否用中断接收。不过这里设置为中断接收,配置如下。
PIE1bits.RCIE = 1; //enables the USART Receive interrupt
INTCONbits.PEIE = 1;
INTCONbits.GIE = 1;
4,开启串口的功能
开启接收,开启发送,开启串口功能,配置如下:
RCSTAbits.CREN = 1;//Enables receiver
TXSTAbits.TXEN = 1;//Transmit enabled
RCSTAbits.SPEN =1; //serial port enable
实例代码:单片机型PIC16LF1823,开发环境MPLAB X IDE.
#include
__CONFIG(FOSC_INTOSC&WDTE_OFF&PWRTE_ON&MCLRE_OFF&CP_ON&CPD_OFF&BOREN_ON
&CLKOUTEN_OFF&IESO_ON&FCMEN_ON);//这个要放到上一行去
__CONFIG(PLLEN_OFF&LVP_OFF) ;
unsigned char RC_DATA;
unsigned char RC_FLAG;
void init_fosc(void)
{
OSCCON = 0xF0;//32MHz
}
void init_eusart()
{
APFCONbits.TXCKSEL = 1;//RA0
APFCONbits.RXDTSEL = 1;//RA1
TRISA1 = 1;//RA1 RX input
ANSELAbits.ANSA1=0;
SPBRGH = 0x00;//
SPBRGL = 0x44;// Baud rate 115200
TXSTAbits.BRGH =1; //high speed
BAUDCONbits.BRG16 =1; //16bit Baud rate Generator is used
TXSTAbits.SYNC =0; //Asynchronous mode
PIE1bits.RCIE = 1; //enables the USART Receive interrupt
INTCONbits.PEIE = 1;
INTCONbits.GIE = 1;
RCSTAbits.CREN = 1;//Enables receiver
TXSTAbits.TXEN = 1;//Transmit enabled
RCSTAbits.SPEN =1; //serial port enable
}
void tx_eusart(unsigned char tx_data)
{
TXREG = tx_data;
while(TRMT==0);// loop
}
void interrupt isr(void)
{
if (RCIE && RCIF) {
RC_DATA=RCREG;
RC_FLAG=1;
LATA2 = 1;
}
}
/*
*
*/
int main(int argc, char** argv) {
init_fosc();
init_eusart();
RC_FLAG=0;
TRISA2 = 0;
LATA2 = 0;
while(1)
{
if(RC_FLAG > 0)
{
tx_eusart(RC_DATA);
RC_FLAG=0;
LATA2=0;
}
}
}
如果我们要向其他设备发送个大写字母A。将是什么样的呢。"A"这个字母对应的ASCII码是65,对应的八位二进制数则是 01000100。TX就将对应的二进制码发送出去。
发送时用高电平来代表1,用低电平代表0. 那不发送数据的时候管脚就一直为高电平。
启动位和停止位
怎么区分现在是在发送数据还是在常态呢?所以在每次发送一个字节的数据之前TX脚都会先输出一小段的低电平。来告诉对方,我要发送数据了这一小段低电平便是启动位(起始位)。
如果我们发送的不仅仅只有一个字节,而是好几个字节,两个数据之间总要有个间隔吧!要不然分不清谁跟谁。所以每发送完一个字节的数据,TX脚就会输出一小段的高电平这便是停止位。
波特率
在数据发送中每个位的时间都要事先定好,而且发送和接收的双方都必须事先知道并设置好。那这个时间是怎么确定的呢?这就牵扯的一个东西波特率。在这里波特率=比特率。比特率也就是 一秒钟发送多少位的数据。如果要一秒钟发送为9600个位,我们将波特率设置为9600。1/9600约等于0.0001s 也就是每个位的发送时间。
小端发送
如果 发送大写字母“ A ”也就是发送二进制数 “01000100”,串行通信是从低位开始发送。
下图为字母”A”数据发送的时序图.
实例:我们可以利用PC机的串口和单片机进行异步串行通信,单片机接收到什么样的数据,就在给PC机发送数据,波特率为115200。不过单片机输出的TTL信号,需TTL转232.PC机才能接收。有关这方面的硬件设计网上很多故不赘述。
在官方的数据手册有对应配置步骤,不过我将根据我的实例来讲解其实也是大同小异。
1,配置端口
1.1配置备用功能
我们可以看单片机的引脚图,第13和第6脚都标有TX说明这两个引脚是可以作为EUSART数据输出。第12和第5脚都标有RX说明这两个引脚是都可以作为EUSART数据输入的。但是同时只有一个引脚作为RX或者TX。不可以同时有两个RX或TX。RX与TX的选择是通过APFCON。我们这里选择13脚作为TX,选择12脚作为RX.配置如下:
APFCONbits.TXCKSEL = 1;//RA0
APFCONbits.RXDTSEL = 1;//RA1
1.2将RX脚配置位数字输入。
我们可以看第12脚上标有AN1,说明该引脚还带有模拟输入的功能。所以我们必须将其设置为数字输入。配置如下:
TRISA1 = 1;//RA1 RX input
ANSELAbits.ANSA1=0;
2 配置波特率
如何设置波特率为115200呢,这里我们必须先要知道计算公式。在官方的数据手册中有给我们提供表格。到底选择那个公式由SYNC,BRG16,BRGH这三个位的配置决定。
我们选在异步通信模式故SYNC为0;
波特率发生器位,可以选择8位或者16位。不过选择16位。波特率的精度会更高。所以选择16位。BRG16为1.
我们这里选择高速的波特率BRGH为1;
配置如下:
TXSTAbits.BRGH =1; //high speed
BAUDCONbits.BRG16 =1; //16bit Baud rate Generator is used
TXSTAbits.SYNC =0; //Asynchronous mode
我们可以得出我们的计算公式为 波特率=FOSC/[4(n+1)];
我们的波特率为115200,时钟定为32MHz。计算出n的值。
115200=32MHz/[4(n+1)];可以得到n=68.444 即n=0x44;
将0x44存入到SPBRGH和SPBRGL中,配置如下
SPBRGH = 0x00;//
SPBRGL = 0x44;// Baud rate 115200
3,配置接收中断
实际可以根据自己的需求配置是否用中断接收。不过这里设置为中断接收,配置如下。
PIE1bits.RCIE = 1; //enables the USART Receive interrupt
INTCONbits.PEIE = 1;
INTCONbits.GIE = 1;
4,开启串口的功能
开启接收,开启发送,开启串口功能,配置如下:
RCSTAbits.CREN = 1;//Enables receiver
TXSTAbits.TXEN = 1;//Transmit enabled
RCSTAbits.SPEN =1; //serial port enable
实例代码:单片机型PIC16LF1823,开发环境MPLAB X IDE.
#include