{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 zhuyonghao123 的文章《PIC单片机之I2C通信(主模式)》','https://www.xiaopingtou.net/article-60167.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
我们今天来讲I2C通信。那I2C通信的特点是什么能。我们一般使用的串口 (半双工异步串行通信)与I2C 有什么区别呢。
串口(半双工异步串行通信):就是好像朋友在对话。我可以主动和你讲话,你也可以主动和我讲话。
I2C:就好像上下级对话。一个领导面对一个或者多个员工。只有领导主动说话的份儿,下面的员工不能主动说话。只有领导问了,员工才能答。
I2C通信
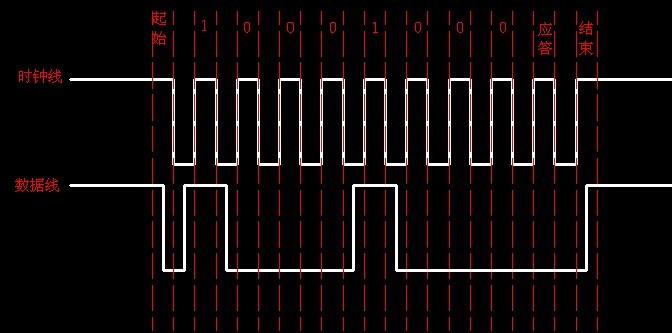
I2C通信只需要两个引脚 一个数据线,一个时钟线。 数据线顾名思义就是用来传递数据的。时钟线是来决定数据传输的速度。当时钟线为高电平时,数据线上的数据才会被认为是有效的。
数据线的 数据有四种状态 : 高电平,低电平,下降沿(高电平变低电平),上升沿(低电平变高电平)。
当时钟线为高电平时候这四种状态分别代表:1,0,起始位,停止位。
如果我们发送的数据为十六进制的0x88即是二进制为10001000的数据是怎么发送的呢?我们就以此为例一步步讲解。
 1,常态
在不发送任何数据的时候数据线和时钟线都为高电平。所以I2C通信在硬件设计,需要在数据线和时钟线上分别加上两个上拉电阻。
2,起始
当开始发送数据的时候 时钟线为高同时数据线从 高电平变低电平,代表开始发送数据。
3,发送数据
发送完起始位后 时钟线变为低电平,在发送每一位的数据之前时钟线有一段低电平,主要的作用是给数据线做电平变化用的。
我们现在要发送的第一个位是 1。
1、时钟线为低,同时数据线从低电平变成高电平。
2、接着时钟线变为高电平,此时接收方得知时钟线为高,便查看数据线为高电平 说明数据为 “1”。
3、我们要发送的下一个位为0。时钟线再变为低,同时数据线从高电平变成低电平。
4、接着时钟线再变为高电平,此时接收方得知时钟线为高,便查看数据线为低电平 说明数据为"0"。
5、再下一个为还为0。时钟线再变为低,同时数据线一直保持低电平不变。
6、接着时钟线再变为高电平,此时接收方得知时钟线为高,便查看数据线为低电平 说明数据为”0“。
以此类推 直到发送完所有的位。
4,应答(ACK)
当接收方接收完一个字节的数据就要告诉对方我收到了。接收方如果接收到数据则控制数据线输出低电平。否则为高电平。
5,停止
没有下一个字节要发送,最后时钟线变为高电平后,数据线从低电平变为高电平。代表数据发送停止。
实例讲解: 使用单片机使用 RSM2257 电子音量控制芯片来控制音量。一个按键按下,声音变大,一个按键按下,声音变小。在加上一个按键,控制一个LED亮灭的程序。而且音量掉电保存。
介绍RSM2257.
子地址
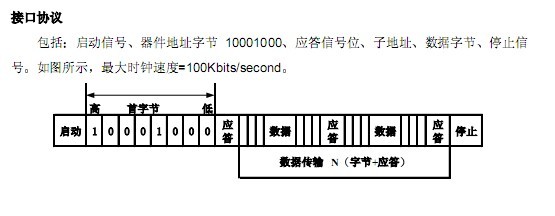
在I2C通信中每一个从设备都有个子地址,因为I2C支持一主多从,也就是说有一个主机可以连接多个从机。每个从机,都有个地址。就好像每个人的名字一样来区分不同的设备。下面是RSM2257接口协议,首先先发送RSM2257 设备地址 10001000.然后再发送数据。
1,常态
在不发送任何数据的时候数据线和时钟线都为高电平。所以I2C通信在硬件设计,需要在数据线和时钟线上分别加上两个上拉电阻。
2,起始
当开始发送数据的时候 时钟线为高同时数据线从 高电平变低电平,代表开始发送数据。
3,发送数据
发送完起始位后 时钟线变为低电平,在发送每一位的数据之前时钟线有一段低电平,主要的作用是给数据线做电平变化用的。
我们现在要发送的第一个位是 1。
1、时钟线为低,同时数据线从低电平变成高电平。
2、接着时钟线变为高电平,此时接收方得知时钟线为高,便查看数据线为高电平 说明数据为 “1”。
3、我们要发送的下一个位为0。时钟线再变为低,同时数据线从高电平变成低电平。
4、接着时钟线再变为高电平,此时接收方得知时钟线为高,便查看数据线为低电平 说明数据为"0"。
5、再下一个为还为0。时钟线再变为低,同时数据线一直保持低电平不变。
6、接着时钟线再变为高电平,此时接收方得知时钟线为高,便查看数据线为低电平 说明数据为”0“。
以此类推 直到发送完所有的位。
4,应答(ACK)
当接收方接收完一个字节的数据就要告诉对方我收到了。接收方如果接收到数据则控制数据线输出低电平。否则为高电平。
5,停止
没有下一个字节要发送,最后时钟线变为高电平后,数据线从低电平变为高电平。代表数据发送停止。
实例讲解: 使用单片机使用 RSM2257 电子音量控制芯片来控制音量。一个按键按下,声音变大,一个按键按下,声音变小。在加上一个按键,控制一个LED亮灭的程序。而且音量掉电保存。
介绍RSM2257.
子地址
在I2C通信中每一个从设备都有个子地址,因为I2C支持一主多从,也就是说有一个主机可以连接多个从机。每个从机,都有个地址。就好像每个人的名字一样来区分不同的设备。下面是RSM2257接口协议,首先先发送RSM2257 设备地址 10001000.然后再发送数据。
 数据
RSM2257的数据是用来表示音量大小的。我们控制两个音频通道,以10dB为单位降低或增加音量。从功能设置位表格中可知数据为 11100B2B1B0.
B2B1B0的数值决定了音量。请详见 衰减设置位。
数据
RSM2257的数据是用来表示音量大小的。我们控制两个音频通道,以10dB为单位降低或增加音量。从功能设置位表格中可知数据为 11100B2B1B0.
B2B1B0的数值决定了音量。请详见 衰减设置位。
 单片机I2C通信初始化设置
1、设置端口为输入
TRISC0 = input;
单片机I2C通信初始化设置
1、设置端口为输入
TRISC0 = input;
TRISC1 = input; 2、设置模式 我们设置ssp1控制寄存器的 SSP1M<3:0>.我们需要的是I2C主模式。设置如下 SSP1CON1bits.SSPM0 = 0;
SSP1CON1bits.SSPM1 = 0;
SSP1CON1bits.SSPM2 = 0;
SSP1CON1bits.SSPM3 = 1;// I2C Master mode ,clock=Fosc/(4*(SSPxADD+1)) 3、设置时钟线频率RSM2257最大为100KHZ,我选择设置为50KHZ. 使用计算公式clock=Fosc/(4*(SSPxADD+1)) 计算出SSP1ADD的值为0x9F; SSP1ADD=0x9F; 4、开启I2C通信 SSP1CON1bits.SSPEN = 1; 单片机I2C发送程序 1、发送起始位 SSP1CON2bits.SEN = 1;//Start condition
while(SSP1CON2bits.SEN == 1);//waiting for Start condition completed.
2、发送地址
PIR1bits.SSP1IF = 0;
SSP1BUF = 0x88;//Device Address
while(PIR1bits.SSP1IF == 0);
PIR1bits.SSP1IF = 0;
// ~ACK 我们不理会接收方有没有应答。
3、发送 10db音量控制的数据
SSP1BUF = tx_data;//Data 10db level
while(PIR1bits.SSP1IF == 0);
PIR1bits.SSP1IF = 0;
4、发送1db音量控制的数据
// ~ACK
SSP1BUF = 0xD0;//Data 1db level
while(PIR1bits.SSP1IF == 0);
PIR1bits.SSP1IF = 0; 5,发送停止位
// ~ACK
SSP1CON2bits.PEN = 1;//Stop condition 关于I2C通信协议,RSM2257,PIC MSSP 模块设置成I2C,更详细的内容就必须去看数据手册了。 实例程序:程序分为main.c 和 define.h两个文件 芯片PIC16LF1823,开发环境MPLAB X IDE. define.h文件 /**********RA*********/
//B'1111,1000'H F8
#define LED_SW RA5//IN
#define UP_SW RA4//IN
#define DOWN_SW RA3//IN
#define LED RA2//OUT
//RA1
//RA0
/**********RC***********/
//H FF
//RC0 SCL
//RC1 SDA
#define input 1
#define LED_VALUE 1
#define UP_VALUE 2
#define DOWN_VALUE 3
#define key_delay 300
main.c文件 #include
#include"define.h"
__CONFIG(FOSC_INTOSC&WDTE_OFF&PWRTE_ON&MCLRE_OFF&CP_ON&CPD_OFF&BOREN_ON &CLKOUTEN_OFF&IESO_ON&FCMEN_ON);
__CONFIG(PLLEN_OFF&LVP_OFF) ;
void tx_pro(unsigned char tx_db);
unsigned char DB_VALUE;
void init_fosc(void)
{
OSCCON = 0xF0;//32MHZ
}
void init_gpio(void)
{
PORTA=0;
LATA =0;
ANSELA=0x00;
TRISA =0xF8;
PORTC=0;
LATC=0;
ANSELC = 0x00;
TRISC =0xFF;
}
void init_i2c_master()
{
TRISC0 = input;
TRISC1 = input;
SSP1CON1bits.SSPM0 = 0;
SSP1CON1bits.SSPM1 = 0;
SSP1CON1bits.SSPM2 = 0;
SSP1CON1bits.SSPM3 = 1;// I2C Master mode ,clock=Fosc/(4*(SSPxADD+1))
SSP1STATbits.SMP = 1;
SSP1ADD = 0x9F;//SCL CLOCK Frequency 50KHZ
SSP1CON1bits.SSPEN = 1;
}
void i2c_master_tx(unsigned char tx_data)
{
SSP1CON2bits.SEN = 1;//Start condition
while(SSP1CON2bits.SEN == 1);//waiting for Start condition completed.
PIR1bits.SSP1IF = 0;
SSP1BUF = 0x88;//Device Address
while(PIR1bits.SSP1IF == 0);
PIR1bits.SSP1IF = 0;
// ~ACK
SSP1BUF = tx_data;//Data 10db level
while(PIR1bits.SSP1IF == 0);
PIR1bits.SSP1IF = 0;
// ~ACK
SSP1BUF = 0xD0;//Data 1db level
while(PIR1bits.SSP1IF == 0);
PIR1bits.SSP1IF = 0;
// ~ACK
SSP1CON2bits.PEN = 1;//Stop condition
}
void delay(unsigned int n)
{
while(n--);
}
unsigned char key_board(void)
{
if(LED_SW==1)
{
delay(key_delay);
if(LED_SW==1)
{
while(LED_SW==1);
return LED_VALUE;
}
}
if(UP_SW==1)
{
delay(key_delay);
if(UP_SW==1)
{
while(UP_SW==1);
return UP_VALUE;
}
}
if(DOWN_SW==1)
{
delay(key_delay);
if(DOWN_SW==1)
{
while(DOWN_SW==1);
return DOWN_VALUE;
}
}
return 0;
}
void DB_INC(void)
{
if(DB_VALUE < 7)
{
DB_VALUE++;
eeprom_write(0x00, DB_VALUE);//将音量值保存到EEPROM这样掉电后数据也不会丢失。
tx_pro(DB_VALUE);
}
}
void DB_DEC(void)
{
if(DB_VALUE > 0)
{
DB_VALUE --;
eeprom_write(0x00, DB_VALUE);
tx_pro(DB_VALUE);
}
}
void tx_pro(unsigned char tx_db)
{
tx_db |= 0xE0; //将高三位设置为1。表示两个音频通道,以10dB为单位降低或增加音量
i2c_master_tx(tx_db);//I2C发送数据程序
}
/*
*
*/
int main(int argc, char** argv) {
unsigned char keyvalue;
init_fosc();
init_gpio();
init_i2c_master();
LED=0;
DB_VALUE= eeprom_read(0x00);//读eeprom 中保存的音量值
if(DB_VALUE > 7)//如果之前没有设置过则音量不衰减
{
DB_VALUE = 0;
}
tx_pro(DB_VALUE);//用I2C通信设置RSM2257的音量
while(1)
{
keyvalue=key_board();//判断按键程序,
switch(keyvalue)
{
case LED_VALUE://LED按键按下
{
LED = ~LED;
};break;
case UP_VALUE://音量加
{
DB_INC();
};break;
case DOWN_VALUE://音量减
{
DB_DEC();
};break;
}
}
}
1,常态
在不发送任何数据的时候数据线和时钟线都为高电平。所以I2C通信在硬件设计,需要在数据线和时钟线上分别加上两个上拉电阻。
2,起始
当开始发送数据的时候 时钟线为高同时数据线从 高电平变低电平,代表开始发送数据。
3,发送数据
发送完起始位后 时钟线变为低电平,在发送每一位的数据之前时钟线有一段低电平,主要的作用是给数据线做电平变化用的。
我们现在要发送的第一个位是 1。
1、时钟线为低,同时数据线从低电平变成高电平。
2、接着时钟线变为高电平,此时接收方得知时钟线为高,便查看数据线为高电平 说明数据为 “1”。
3、我们要发送的下一个位为0。时钟线再变为低,同时数据线从高电平变成低电平。
4、接着时钟线再变为高电平,此时接收方得知时钟线为高,便查看数据线为低电平 说明数据为"0"。
5、再下一个为还为0。时钟线再变为低,同时数据线一直保持低电平不变。
6、接着时钟线再变为高电平,此时接收方得知时钟线为高,便查看数据线为低电平 说明数据为”0“。
以此类推 直到发送完所有的位。
4,应答(ACK)
当接收方接收完一个字节的数据就要告诉对方我收到了。接收方如果接收到数据则控制数据线输出低电平。否则为高电平。
5,停止
没有下一个字节要发送,最后时钟线变为高电平后,数据线从低电平变为高电平。代表数据发送停止。
实例讲解: 使用单片机使用 RSM2257 电子音量控制芯片来控制音量。一个按键按下,声音变大,一个按键按下,声音变小。在加上一个按键,控制一个LED亮灭的程序。而且音量掉电保存。
介绍RSM2257.
子地址
在I2C通信中每一个从设备都有个子地址,因为I2C支持一主多从,也就是说有一个主机可以连接多个从机。每个从机,都有个地址。就好像每个人的名字一样来区分不同的设备。下面是RSM2257接口协议,首先先发送RSM2257 设备地址 10001000.然后再发送数据。
数据
RSM2257的数据是用来表示音量大小的。我们控制两个音频通道,以10dB为单位降低或增加音量。从功能设置位表格中可知数据为 11100B2B1B0.
B2B1B0的数值决定了音量。请详见 衰减设置位。
单片机I2C通信初始化设置
1、设置端口为输入
TRISC0 = input;TRISC1 = input; 2、设置模式 我们设置ssp1控制寄存器的 SSP1M<3:0>.我们需要的是I2C主模式。设置如下 SSP1CON1bits.SSPM0 = 0;
SSP1CON1bits.SSPM1 = 0;
SSP1CON1bits.SSPM2 = 0;
SSP1CON1bits.SSPM3 = 1;// I2C Master mode ,clock=Fosc/(4*(SSPxADD+1)) 3、设置时钟线频率RSM2257最大为100KHZ,我选择设置为50KHZ. 使用计算公式clock=Fosc/(4*(SSPxADD+1)) 计算出SSP1ADD的值为0x9F; SSP1ADD=0x9F; 4、开启I2C通信 SSP1CON1bits.SSPEN = 1; 单片机I2C发送程序 1、发送起始位 SSP1CON2bits.SEN = 1;//Start condition
while(SSP1CON2bits.SEN == 1);//waiting for Start condition completed.
2、发送地址
PIR1bits.SSP1IF = 0;
SSP1BUF = 0x88;//Device Address
while(PIR1bits.SSP1IF == 0);
PIR1bits.SSP1IF = 0;
// ~ACK 我们不理会接收方有没有应答。
3、发送 10db音量控制的数据
SSP1BUF = tx_data;//Data 10db level
while(PIR1bits.SSP1IF == 0);
PIR1bits.SSP1IF = 0;
4、发送1db音量控制的数据
// ~ACK
SSP1BUF = 0xD0;//Data 1db level
while(PIR1bits.SSP1IF == 0);
PIR1bits.SSP1IF = 0; 5,发送停止位
// ~ACK
SSP1CON2bits.PEN = 1;//Stop condition 关于I2C通信协议,RSM2257,PIC MSSP 模块设置成I2C,更详细的内容就必须去看数据手册了。 实例程序:程序分为main.c 和 define.h两个文件 芯片PIC16LF1823,开发环境MPLAB X IDE. define.h文件 /**********RA*********/
//B'1111,1000'H F8
#define LED_SW RA5//IN
#define UP_SW RA4//IN
#define DOWN_SW RA3//IN
#define LED RA2//OUT
//RA1
//RA0
/**********RC***********/
//H FF
//RC0 SCL
//RC1 SDA
#define input 1
#define LED_VALUE 1
#define UP_VALUE 2
#define DOWN_VALUE 3
#define key_delay 300
main.c文件 #include
#include"define.h"
__CONFIG(FOSC_INTOSC&WDTE_OFF&PWRTE_ON&MCLRE_OFF&CP_ON&CPD_OFF&BOREN_ON &CLKOUTEN_OFF&IESO_ON&FCMEN_ON);
__CONFIG(PLLEN_OFF&LVP_OFF) ;
void tx_pro(unsigned char tx_db);
unsigned char DB_VALUE;
void init_fosc(void)
{
OSCCON = 0xF0;//32MHZ
}
void init_gpio(void)
{
PORTA=0;
LATA =0;
ANSELA=0x00;
TRISA =0xF8;
PORTC=0;
LATC=0;
ANSELC = 0x00;
TRISC =0xFF;
}
void init_i2c_master()
{
TRISC0 = input;
TRISC1 = input;
SSP1CON1bits.SSPM0 = 0;
SSP1CON1bits.SSPM1 = 0;
SSP1CON1bits.SSPM2 = 0;
SSP1CON1bits.SSPM3 = 1;// I2C Master mode ,clock=Fosc/(4*(SSPxADD+1))
SSP1STATbits.SMP = 1;
SSP1ADD = 0x9F;//SCL CLOCK Frequency 50KHZ
SSP1CON1bits.SSPEN = 1;
}
void i2c_master_tx(unsigned char tx_data)
{
SSP1CON2bits.SEN = 1;//Start condition
while(SSP1CON2bits.SEN == 1);//waiting for Start condition completed.
PIR1bits.SSP1IF = 0;
SSP1BUF = 0x88;//Device Address
while(PIR1bits.SSP1IF == 0);
PIR1bits.SSP1IF = 0;
// ~ACK
SSP1BUF = tx_data;//Data 10db level
while(PIR1bits.SSP1IF == 0);
PIR1bits.SSP1IF = 0;
// ~ACK
SSP1BUF = 0xD0;//Data 1db level
while(PIR1bits.SSP1IF == 0);
PIR1bits.SSP1IF = 0;
// ~ACK
SSP1CON2bits.PEN = 1;//Stop condition
}
void delay(unsigned int n)
{
while(n--);
}
unsigned char key_board(void)
{
if(LED_SW==1)
{
delay(key_delay);
if(LED_SW==1)
{
while(LED_SW==1);
return LED_VALUE;
}
}
if(UP_SW==1)
{
delay(key_delay);
if(UP_SW==1)
{
while(UP_SW==1);
return UP_VALUE;
}
}
if(DOWN_SW==1)
{
delay(key_delay);
if(DOWN_SW==1)
{
while(DOWN_SW==1);
return DOWN_VALUE;
}
}
return 0;
}
void DB_INC(void)
{
if(DB_VALUE < 7)
{
DB_VALUE++;
eeprom_write(0x00, DB_VALUE);//将音量值保存到EEPROM这样掉电后数据也不会丢失。
tx_pro(DB_VALUE);
}
}
void DB_DEC(void)
{
if(DB_VALUE > 0)
{
DB_VALUE --;
eeprom_write(0x00, DB_VALUE);
tx_pro(DB_VALUE);
}
}
void tx_pro(unsigned char tx_db)
{
tx_db |= 0xE0; //将高三位设置为1。表示两个音频通道,以10dB为单位降低或增加音量
i2c_master_tx(tx_db);//I2C发送数据程序
}
/*
*
*/
int main(int argc, char** argv) {
unsigned char keyvalue;
init_fosc();
init_gpio();
init_i2c_master();
LED=0;
DB_VALUE= eeprom_read(0x00);//读eeprom 中保存的音量值
if(DB_VALUE > 7)//如果之前没有设置过则音量不衰减
{
DB_VALUE = 0;
}
tx_pro(DB_VALUE);//用I2C通信设置RSM2257的音量
while(1)
{
keyvalue=key_board();//判断按键程序,
switch(keyvalue)
{
case LED_VALUE://LED按键按下
{
LED = ~LED;
};break;
case UP_VALUE://音量加
{
DB_INC();
};break;
case DOWN_VALUE://音量减
{
DB_DEC();
};break;
}
}
}