{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 ilikemcu 的文章《【连载】从单片机到操作系统③——走进FreeRTOS》','https://www.xiaopingtou.net/article-60264.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
从前面的文章,我们知道,(单核)单片机某一时刻只能干一件事,会造成单片机资源的浪费,而且还有可能响应不够及时,所以,在比较庞大的程序或者是要求实时性比较高的情况下,我们可以移植操作系统。因为这种情况下操作系统比裸机方便很多,效率也高。下面,杰杰将带你们走进FreeRTOS的世界随便看看。首先说明一下:① 鉴于作者水平有限,学习并不深入,只是学习了皮毛而已,出错在所难免,欢迎指正。② 以下文章说的操作系统均为FreeRTOS③ 文章参考了野火的书籍:【 野火®】 《从 0 到 1 教你写 uCOS-III 》 ——刘火良④ 参考了网络开源作者的笔记下面正式开始本文内容。在没有用到操作系统之前,单片机的运行是顺序执行,就是说,很多时候,单片机在执行这件事的时候,无法切换到另一件事。这就造成了资源的浪费,以及错过了突发的信号。那么,用上了操作系统的时候,很容易避免了这样的问题。很简单,从感觉上,单片机像是同时在干多件事,为什么说像呢,因为单片机的执行速度很快,快到我们根本没办法感觉出来,但是同时做两件事是不可能的,在(单核)单片机中,因为它的硬件结构决定了CPU只能在一个时间段做一件事如: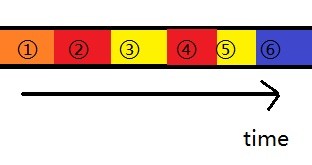 如这张图,都是按照顺序来执行这些事的,假设每个任务(事件)的time无限小,小到我们根本没法分辨出来,那么我们也会感觉单片机在同时做这六件事。真相就是:所有任务都好像在执行,但实际上在任何一个时刻都只有一个任务在执行 如是加上了中断系统的话,就可以将上图理解为下图:
如这张图,都是按照顺序来执行这些事的,假设每个任务(事件)的time无限小,小到我们根本没法分辨出来,那么我们也会感觉单片机在同时做这六件事。真相就是:所有任务都好像在执行,但实际上在任何一个时刻都只有一个任务在执行 如是加上了中断系统的话,就可以将上图理解为下图: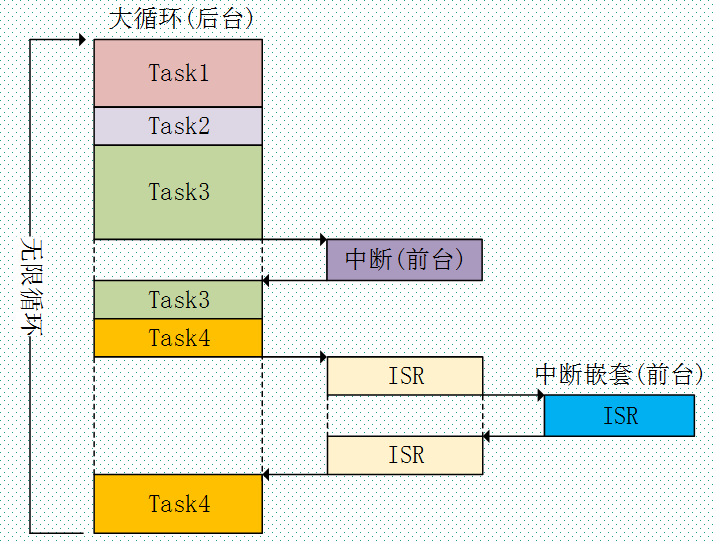 (图片来源网络)通常把程序分为两部分:前台系统和后台系统。 简单的小系统通常是前后台系统,这样的程序包括一个死循环和若干个中断服务程序:应用程序是一个无限循环,循环中调用API函数完成所需的操作,这个大循环就叫做后台系统。中断服务程序用于处理系统的异步事件,也就是前台系统。前台是中断级,后台是任务级。简单来说就是程序一直按顺序执行,有中断来了就做中断(前台)的事情。处理完中断(前台)的事情,就回到大循环(后台)继续按顺序执行。那么问题来了,这样子的系统肯定不是好的系统,我在做第一个任务的时候想做第四个任务,根本做不到啊,其实也能做到,让程序执行的指针cp指向第四个任务就行了。但是任务一旦复杂,那么整个工程的代码的结构,可移植性,及可读性,肯定会差啦。 FreeRTOS 那么操作系统的移植就是不可或缺的了。什么叫RTOS?:Real Time OS,实时操作系统,强调的是实时性,就是要规定什么时间该做什么任务。那么假如同一个时刻,需要执行两个或者多个任务怎么办。那么我们可以人为地把任务划分优先级,哪个任务重要,就先做,因为前面一直强调,单片机无法同时做两件事,在某一个时刻只能做一件事。那么FreeRTOS是怎么操作的呢?先看看FreeRTOS的内核吧:FreeRTOS是一个可裁剪、可剥夺型的多任务内核,而且没有任务数限制。FreeRTOS提供了实时操作系统所需的所有功能,包括资源管理、同步、任务通信等。 FreeRTOS是用C和汇编来写的,其中绝大部分都是用C语言编写的,只有极少数的与处理器密切相关的部分代码才是用汇编写的,FreeRTOS结构简洁,可读性很强!RTOS的内核负责管理所有的任务,内核决定了运行哪个任务,何时停止当前任务切换到其他任务,这个是内核的多任务管理能力。可剥夺内核顾名思义就是可以剥夺其他任务的CPU使用权,它总是运行就绪任务中的优先级最高的那个任务。
(图片来源网络)通常把程序分为两部分:前台系统和后台系统。 简单的小系统通常是前后台系统,这样的程序包括一个死循环和若干个中断服务程序:应用程序是一个无限循环,循环中调用API函数完成所需的操作,这个大循环就叫做后台系统。中断服务程序用于处理系统的异步事件,也就是前台系统。前台是中断级,后台是任务级。简单来说就是程序一直按顺序执行,有中断来了就做中断(前台)的事情。处理完中断(前台)的事情,就回到大循环(后台)继续按顺序执行。那么问题来了,这样子的系统肯定不是好的系统,我在做第一个任务的时候想做第四个任务,根本做不到啊,其实也能做到,让程序执行的指针cp指向第四个任务就行了。但是任务一旦复杂,那么整个工程的代码的结构,可移植性,及可读性,肯定会差啦。 FreeRTOS 那么操作系统的移植就是不可或缺的了。什么叫RTOS?:Real Time OS,实时操作系统,强调的是实时性,就是要规定什么时间该做什么任务。那么假如同一个时刻,需要执行两个或者多个任务怎么办。那么我们可以人为地把任务划分优先级,哪个任务重要,就先做,因为前面一直强调,单片机无法同时做两件事,在某一个时刻只能做一件事。那么FreeRTOS是怎么操作的呢?先看看FreeRTOS的内核吧:FreeRTOS是一个可裁剪、可剥夺型的多任务内核,而且没有任务数限制。FreeRTOS提供了实时操作系统所需的所有功能,包括资源管理、同步、任务通信等。 FreeRTOS是用C和汇编来写的,其中绝大部分都是用C语言编写的,只有极少数的与处理器密切相关的部分代码才是用汇编写的,FreeRTOS结构简洁,可读性很强!RTOS的内核负责管理所有的任务,内核决定了运行哪个任务,何时停止当前任务切换到其他任务,这个是内核的多任务管理能力。可剥夺内核顾名思义就是可以剥夺其他任务的CPU使用权,它总是运行就绪任务中的优先级最高的那个任务。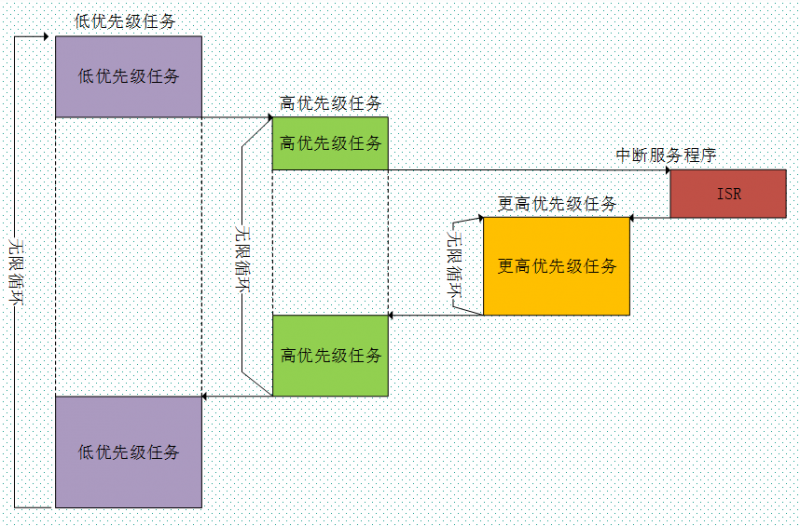 (图片来源网络)在FreeRTOS中,每个任务都是无限循环的,一般来说任务是不会结束运行的,也不允许有返回值,任务的结构一般都是
(图片来源网络)在FreeRTOS中,每个任务都是无限循环的,一般来说任务是不会结束运行的,也不允许有返回值,任务的结构一般都是
文章来自“创客飞梦空间”这是一个专门分享开源方案&心得的公众号,目的是为了记录自己的开发之旅&分享各位大神的创意,把方案,资料,正能量传递给各位开发者,可能,很多人没啥时间在论坛看方案,但是,微信公众号却可以在睡前了解一下新的方案,涉及的有开源的方案,思想,算法,经验,教程等。在未来的日子里,创客飞梦空间与你们同在,共同进步,放飞我们的梦想。

欢迎关注,创客与您一起进步
如这张图,都是按照顺序来执行这些事的,假设每个任务(事件)的time无限小,小到我们根本没法分辨出来,那么我们也会感觉单片机在同时做这六件事。真相就是:所有任务都好像在执行,但实际上在任何一个时刻都只有一个任务在执行 如是加上了中断系统的话,就可以将上图理解为下图:(图片来源网络)通常把程序分为两部分:前台系统和后台系统。 简单的小系统通常是前后台系统,这样的程序包括一个死循环和若干个中断服务程序:应用程序是一个无限循环,循环中调用API函数完成所需的操作,这个大循环就叫做后台系统。中断服务程序用于处理系统的异步事件,也就是前台系统。前台是中断级,后台是任务级。简单来说就是程序一直按顺序执行,有中断来了就做中断(前台)的事情。处理完中断(前台)的事情,就回到大循环(后台)继续按顺序执行。那么问题来了,这样子的系统肯定不是好的系统,我在做第一个任务的时候想做第四个任务,根本做不到啊,其实也能做到,让程序执行的指针cp指向第四个任务就行了。但是任务一旦复杂,那么整个工程的代码的结构,可移植性,及可读性,肯定会差啦。 FreeRTOS 那么操作系统的移植就是不可或缺的了。什么叫RTOS?:Real Time OS,实时操作系统,强调的是实时性,就是要规定什么时间该做什么任务。那么假如同一个时刻,需要执行两个或者多个任务怎么办。那么我们可以人为地把任务划分优先级,哪个任务重要,就先做,因为前面一直强调,单片机无法同时做两件事,在某一个时刻只能做一件事。那么FreeRTOS是怎么操作的呢?先看看FreeRTOS的内核吧:FreeRTOS是一个可裁剪、可剥夺型的多任务内核,而且没有任务数限制。FreeRTOS提供了实时操作系统所需的所有功能,包括资源管理、同步、任务通信等。 FreeRTOS是用C和汇编来写的,其中绝大部分都是用C语言编写的,只有极少数的与处理器密切相关的部分代码才是用汇编写的,FreeRTOS结构简洁,可读性很强!RTOS的内核负责管理所有的任务,内核决定了运行哪个任务,何时停止当前任务切换到其他任务,这个是内核的多任务管理能力。可剥夺内核顾名思义就是可以剥夺其他任务的CPU使用权,它总是运行就绪任务中的优先级最高的那个任务。(图片来源网络)在FreeRTOS中,每个任务都是无限循环的,一般来说任务是不会结束运行的,也不允许有返回值,任务的结构一般都是- While(1)
- {
- /****一直在循环执行*****/
- }
- // task. h task.c
- BaseType_t xTaskCreate( TaskFunction_t pvTaskCode,
- const char * const pcName,
- uint16_t usStackDepth,
- void *pvParameters,
- UBaseType_t uxPriority,
- TaskHandle_t *pvCreatedTask
- );
- TaskFunction_t pvTaskCode //传递进来的是任务函数
- const char * const pcName //传递进来的是任务Name
- uint16_t usStackDepth //传入的是堆栈的大小
- void *pvParameters //传递给任务函数的参数
- UBaseType_t uxPriority //任务优先级
- TaskHandle_t *pvCreatedTask //任务句柄
- //任务优先级
- #define LED_TASK_PRIO 2
- //任务堆栈大小
- #define LED_STK_SIZE 50
- //任务句柄
- TaskHandle_t LED_Task_Handler;
- //任务函数
- void LED_Task(void *pvParameters);
- xTaskCreate((TaskFunction_t )LED_Task, //任务函数
- (const char* )"led_task", //任务名称
- (uint16_t )LED_STK_SIZE, //任务堆栈大小
- (void* )NULL, //传递给任务函数的参数
- (UBaseType_t )START_TASK_PRIO, //任务优先级
- (TaskHandle_t* )&LED_Task_Handler);//任务句柄
- vTaskStartScheduler(); //开启任务调度
- // @return pdPASS if the task was successfully created and added to a readylist, otherwise an error code defined in the file projdefs.h
- //LED任务函数
- void LED_Task(void *pvParameters)
- {
- while(1)
- {
- LED0 = !LED0;
- vTaskDelay(1000);
- }
- }
文章来自“创客飞梦空间”这是一个专门分享开源方案&心得的公众号,目的是为了记录自己的开发之旅&分享各位大神的创意,把方案,资料,正能量传递给各位开发者,可能,很多人没啥时间在论坛看方案,但是,微信公众号却可以在睡前了解一下新的方案,涉及的有开源的方案,思想,算法,经验,教程等。在未来的日子里,创客飞梦空间与你们同在,共同进步,放飞我们的梦想。
欢迎关注,创客与您一起进步