{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 plzousn 的文章《PIC 脉冲调控PWM模块》','https://www.xiaopingtou.net/article-60385.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}

 PWM的输出引脚通过PWMxCON寄存器的第7位 PWM 模块使能位(PWMxEN)配置为PWM输出
其中输出脚分别为 RC5-----PWM1 RC3-----PWM2 RA2-----PWM3 RC1-----PWM4
PWM的输出引脚通过PWMxCON寄存器的第7位 PWM 模块使能位(PWMxEN)配置为PWM输出
其中输出脚分别为 RC5-----PWM1 RC3-----PWM2 RA2-----PWM3 RC1-----PWM4

 个人总结关于PIC的PWM模块配置的一般步骤,感觉数据手册推荐的配置方法略微麻烦。
①配置系统时钟
②配置PWM引脚为输出
③配置TIM2的预分频数
④配置计数器PR2和TMR2
⑤配置输出极性并且PWM引脚输出使能
⑥设置占空比
⑦使能PWM波输出
void main()
个人总结关于PIC的PWM模块配置的一般步骤,感觉数据手册推荐的配置方法略微麻烦。
①配置系统时钟
②配置PWM引脚为输出
③配置TIM2的预分频数
④配置计数器PR2和TMR2
⑤配置输出极性并且PWM引脚输出使能
⑥设置占空比
⑦使能PWM波输出
void main(){
OSCCON = 0x78;//16M
__delay_ms(20);
TRISCbits.TRISC5 = 0;//RC5配置为输出
ANSELCbits.ANSC3 = 0;
TRISCbits.TRISC3 = 0;//RC3配置为输出
ANSELCbits.ANSC1 = 0;
TRISCbits.TRISC1 = 0;//RC1配置为输出
ANSELAbits.ANSA2 = 0;
TRISAbits.TRISA2 = 0;//RA2配置为输出
T2CONbits.TMR2ON = 1;//Timer2 使能
T2CONbits.T2CKPS0 = 0;
T2CONbits.T2CKPS1 = 0;//1:1分频
PR2 = 199;
TMR2 = 0;
PWM1CONbits.PWM1POL = 0;//PWM 输出为高电平有效
PWM2CONbits.PWM2POL = 0;//PWM 输出为高电平有效
PWM3CONbits.PWM3POL = 0;//PWM 输出为高电平有效
PWM4CONbits.PWM4POL = 0;//PWM 输出为高电平有效
PWM1CONbits.PWM1EN = 1;//使能 PWM 模块
PWM2CONbits.PWM2EN = 1;//使能 PWM 模块
PWM3CONbits.PWM3EN = 1;//使能 PWM 模块
PWM4CONbits.PWM4EN = 1;//使能 PWM 模块
PWM1DCH = 0x19;
PWM1DCL = 0x00;//12.5%
PWM2DCH = 0x3c;
PWM2DCL = 0x00;//30%
PWM3DCH = 0x64;
PWM3DCL = 0x00;//50%
PWM4DCH = 0xa0;
PWM4DCL = 0x00;//80%
PWM1CONbits.PWM1OE = 1;//使能到 PWM引脚的输出
PWM2CONbits.PWM2OE = 1;//使能到 PWM引脚的输出
PWM3CONbits.PWM3OE = 1;//使能到 PWM引脚的输出
PWM4CONbits.PWM4OE = 1;//使能到 PWM引脚的输出
while(1)
{
}
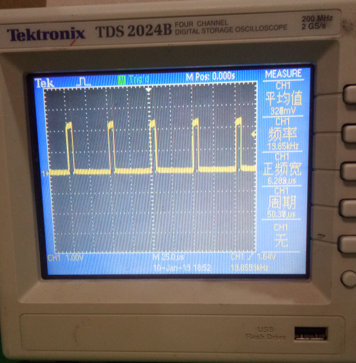
} 理论上周期为 f=FOSC/4/PS/(PR2+1)=16M/4/1/(199+1)=20K 占空比为 D1=100/800=12.5% D2=240/800=30% D3=500/800=50% D4=640/800=80% 实际示波器测量得到波形如下图所示



 实际与理论基本相符
实际与理论基本相符