{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 爱上傻傻 的文章《FreeRTOS在PIC32MX系列微处理器上的调试心得》','https://www.xiaopingtou.net/article-60677.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
1. 引言
最近在调试程序时发现程序会在运行一段时间后崩溃。在仔细阅读FreeRTOS和PIC32MX的相关资料后,修改了FreeRTOS配置,调整了优先级设置,优化了关键区域的代码,显著降低了崩溃的概率。在这里分享一些心得。 想学习FreeRTOS的基础知识请阅读专栏:1. FreeRTOS基础篇
2. FreeRTOS高级篇
2. 配置FreeRTOSConfig.h
这里主要提几个与PIC32MX微处理器的特性有关的配置项,其他通用的配置请参考 FreeRTOS系列第6篇—FreeRTOS内核配置说明/* Interrupt nesting behaviour configuration. */
/* The priority at which the tick interrupt runs. This should probably be kept at 1. */
#define configKERNEL_INTERRUPT_PRIORITY 1
/* The maximum interrupt priority from which FreeRTOS.org API functions can be called.
Only API functions that end in ...FromISR() can be used within interrupts. */
#define configMAX_SYSCALL_INTERRUPT_PRIORITY 6
PIC32MX的中断优先级为1-7,其中1最低,7最高。低优先级的中断触发的中断服务程序可以被高优先级的中断打断,从而执行更紧急的中断服务程序。
系统定时器中断使用最低优先级1,其可以被中断优先级为2-7的中断嵌套。
优先级为2-6的中断触发的中断服务程序里,可以使用FreeRTOS提供的后缀为FromISR()的API函数。
优先级为7的中断触发的中断服务程序不受FreeRTOS的影响,且不可以使用后缀为FromISR()的API函数。
设置configMAX_SYSCALL_INTERRUPT_PRIORITY的意义在于,使一些中断服务函数可以使用自己的栈空间。不高于configMAX_SYSCALL_INTERRUPT_PRIORITY的中断服务程序都使用相同的中断栈空间。
/* Records the interrupt nesting depth. This is initialised to one as it is
decremented to 0 when the first task starts. */
volatile UBaseType_t uxInterruptNesting = 0x01;
/* Stores the task stack pointer when a switch is made to use the system stack. */
UBaseType_t uxSavedTaskStackPointer = 0;
/* The stack used by interrupt service routines that cause a context switch. */
StackType_t xISRStack[ configISR_STACK_SIZE ] = { 0 };
/* The top of stack value ensures there is enough space to store 6 registers on
the callers stack, as some functions seem to want to do this. */
const StackType_t * const xISRStackTop = &( xISRStack[ configISR_STACK_SIZE - 7 ] );
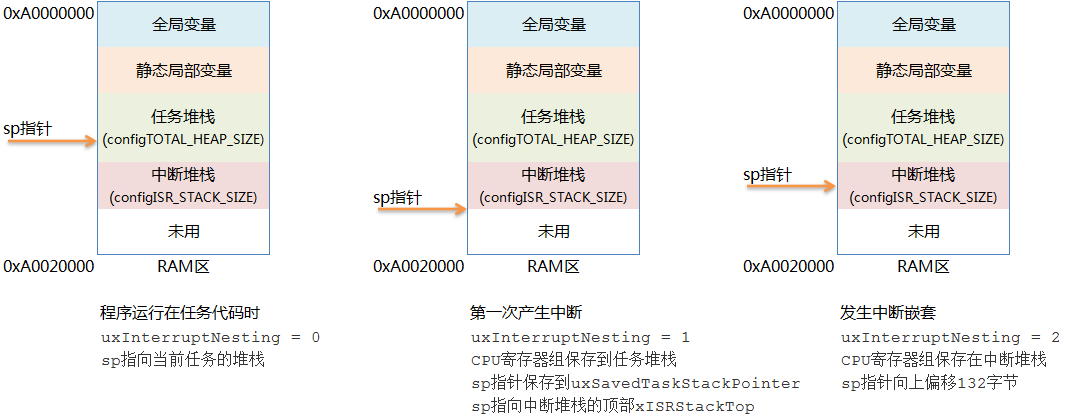
uxInterruptNesting用来标示中断嵌套层数。每进入一次中断,uxInterruptNesting值自加;每退出一次中断,uxInterruptNesting自减。嵌套次数越多,这个数越大。程序在保存现场时使用这个值来判断是将CPU寄存器组压入任务栈还是中断栈。
uxSavedTaskStackPointer用来在进入中断服务程序前保存任务栈,在退出中断服务程序时将sp指针指向任务栈。
xISRStack是中断服务程序用到的栈。进入中断服务程序时,sp指针被指向这个中断栈的顶部xISRStackTop;退出中断服务程序时,sp指针恢复到任务的栈指针uxSavedTaskStackPointer。
 明确了这几个变量的用途后,程序编写时需要注意如下几点:
明确了这几个变量的用途后,程序编写时需要注意如下几点:
- uxInterruptNesting最大不应该超过硬件中断源的总数,否则可以判定程序运行异常;
- xISRStack的大小由configISR_STACK_SIZE设置,单位是字节。所有中断服务程序中创建的局部变量都会使用这个栈。需要确保中断嵌套层数达到最大时xISRStack也够用,否则会产生栈的溢出,后果很可能是程序崩溃;
- 不要在中断服务程序中随意移动sp指针,否则中断嵌套发生时,被中断的服务程序的栈有可能被破坏。
3. 优化任务优先级
在创建FreeRTOS任务时需要为任务指定一个优先级。优先级高的任务更容易获得CPU的使用权。 产品代码创建了17个任务,其中有一个任务专门用于访问串口硬件以发送串口log,优先级设成最高。将这个任务的优先级设成最低后,系统崩溃的概率降低了。4. 优化中断处理
中断服务程序会打断任务代码的执行,且进入和退出中断时需要频繁调用入栈和出栈函数,加重CPU的运行负担。 中断处理的优化方法一般有如下几种:- 降低中断嵌套次数
- 减少中断产生频率
- 缩短中断处理时间
4.1. 降低中断嵌套次数
产品程序崩溃一般发生在硬件中断频繁产生的时候。为了降低中断嵌套次数,根据中断触发的频率,调整了硬件的中断优先级:- 2个I2C中断(优先级4)
- 2个SPI中断(优先级6)
- 3个UART中断(优先级3)
- 2个定时器中断(优先级2)
- 1个输入电平捕捉中断(优先级5)
4.2. 减少中断产生频率
减少中断产生频率的方法可以有:- 尽量用FreeRTOS提供的时间函数
- 硬件驱动方式从中断式改成轮询式
4.3. 缩短中断处理时间
在中断服务程序中,只接收和发送数据,而不作数据的解析。接收到的数据通过队列发送给中断延时服务任务:uint8_t recvBuf[100];
void func_ISR(void)
{
receiveData(recvBuf);
queueSend(&recvBuf);
clearISRFlag();
}
void func_task(void)
{
while(1)
{
if (TRUE == queueRecv(&recvBuf))
{
parse(recvBuf);
}
}
}
5. 分析系统崩溃原因
PIC32MX的CPU提供了一种程序异常处理的机制。当程序运行异常时,程序会跳转到_general_exception_handler函数:void _general_exception_handler ( void )
{
/* Mask off Mask of the ExcCode Field from the Cause Register
Refer to the MIPs Software User's manual */
_excep_code = (_CP0_GET_CAUSE() & 0x0000007C) >> 2;
_excep_addr = _CP0_GET_EPC();
_cause_str = cause[_excep_code];
}
_excep_code 给出产生exception的原因: 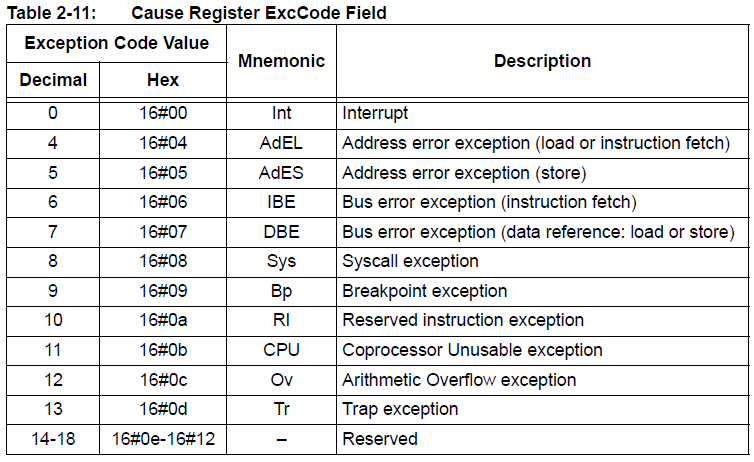 _excep_addr给出直接导致exception的地址。
_excep_addr给出直接导致exception的地址。
6. 优化底层移植汇编代码
调试时程序经常崩溃在如下汇编代码: ehb指令的作用主要是解决流水线执行异常,但不能解决流水线指令异常。
ehb指令的作用主要是解决流水线执行异常,但不能解决流水线指令异常。
 浏览官方技术支持论坛后,发现有人遇到类似的问题:
浏览官方技术支持论坛后,发现有人遇到类似的问题: http://www.microchip.com/forums/m797764.aspx
他的解决办法是在ehb之前加上ssnop指令。 我试着在vPortYieldISR和portRESTORE_CONTEXT里的ehb之前添加了ssnop指令,与ehb相关的程序崩溃解决了。