{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 qq_38263433 的文章《UART串口通信》','https://www.xiaopingtou.net/article-62650.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
信按照传统的理解就是信息的传输与交换。对于单片机来说,通信则与传感器、存储芯片、外围控制芯片等技术紧密结合,成为整个单片机系统的“神经中枢”。没有通信,单片机所实现的功能仅仅局限于单片机本身,就无法通过其他设备获得有用信息,也无法将自己产生的信息告诉其它设备。如果单片机通信没处理好的话,它和外围器件的合作程度就受到限制,最终整个系统也无法完成强大的功能,由此可见单片机通信技术的重要性。UART(Universal
Asynchronous Receiver/Transmitter,即通用异步收发器)串行通信是单片机最常用的一种通信技术,通常用于单片机和电脑之间以及单片机和单片机之间的通信。
11.1 串行通信的初步认识
通信按照基本类型可以分为并行通信和串行通信。并行通信时数据的各个位同时传送,可以实现字节为单位通信,但是因为通信线多占用资源多,成本高。比如我们前边用到的P0 = 0xfe;一次给P0的8个IO口分别赋值,同时进行信号输出,类似于有8个车道同时可以过去8辆车一样,这种形式就是并行的,我们习惯上还称P0、P1、P2和P3为51单片机的4组并行总线。
而串行通信,就如同一条车道,一次只能一辆车过去,如果一个0xfe这样一个字节的数据要传输过去的话,假如低位在前高位在后,那发送方式就是0-1-1-1-1-1-1-1-1,一位一位的发送出去的,要发送8次才能发送完一个字节。
在我们的STC89C52上,有两个引脚,是专门用来做UART串口通信的,一个是P3.0一个是P3.1,还分别有另外的名字叫做RXD和TXD,这两个引脚是专门用来进行UART通信的,如果我们两个单片机进行UART串口通信的话,那基本的演示图如图11-1所示。
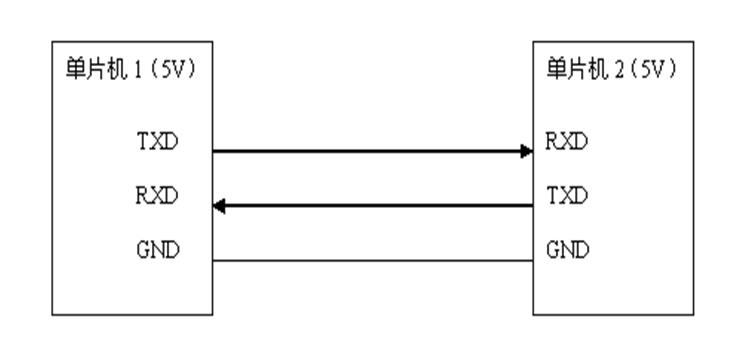 图11-1 单片机之间UART通信示意图
图中,GND表示单片机系统电源的参考地,TXD是串行发送引脚,RXD是串行接收引脚。两个单片机之间要通信,首先电源基准得一样,所以我们要把两个单片机的GND相互连起来,然后单片机1的TXD引脚接到单片机2的RXD引脚上,即此路为单片机1发送而单片机2接收的通道,单片机1的RXD引脚接到单片机2的TXD引脚上,即此路为单片机2发送而单片机2接收的通道。这个示意图就体现了两个单片机各自收发信息的过程。
当单片机1想给单片机2发送数据时,比如发送一个0xE4这个数据,用二进制形式表示就是0b11100100,在UART通信过程中,是低位先发,高位后发的原则,那么就让TXD首先拉低电平,持续一段时间,发送一位0,然后继续拉低,再持续一段时间,又发送了一位0,然后拉高电平,持续一段时间,发了一位1......一直到把8位二进制数字0b11100100全部发送完毕。这里就牵扯到了一个问题,就是持续的这“一段时间”到底是多久?从这里引入我们通信中的另外重要概念——波特率,也叫做比特率。
波特率就是发送一位二进制数据的速率,习惯上用baud表示,即我们发送一位数据的持续时间=1/baud。在通信之前,单片机1和单片机2首先都要明确的约定好他们之间的通信波特率,必须保持一致,收发双方才能正常实现通信,这一点大家一定要记清楚。
约定好速度后,我们还要考虑第二个问题,数据什么时候是起始,什么时候是结束呢?不管是提前接收还是延迟接收,数据都会接收错误。在UART串行通信的时候,一个字节是8位,规定当没有通信信号发生时,通信线路保持高电平,当要发送数据之前,先发一位0表示起始位,然后发送8位数据位,数据位是先低后高的顺序,数据位发完后再发一位1表示停止位。这样本来要发送一个字节8位数据,而实际上我们一共发送了10位,多出来的两位其中一位起始位,一位停止位。而接收方呢,原本一直保持的高电平,一旦检测到来了一位低电平,那就知道了要开始准备接收数据了,接收到8位数据位后,然后检测到停止位,再准备下一个数据的接收了。我们图示看一下,如图11-2所示。
图11-1 单片机之间UART通信示意图
图中,GND表示单片机系统电源的参考地,TXD是串行发送引脚,RXD是串行接收引脚。两个单片机之间要通信,首先电源基准得一样,所以我们要把两个单片机的GND相互连起来,然后单片机1的TXD引脚接到单片机2的RXD引脚上,即此路为单片机1发送而单片机2接收的通道,单片机1的RXD引脚接到单片机2的TXD引脚上,即此路为单片机2发送而单片机2接收的通道。这个示意图就体现了两个单片机各自收发信息的过程。
当单片机1想给单片机2发送数据时,比如发送一个0xE4这个数据,用二进制形式表示就是0b11100100,在UART通信过程中,是低位先发,高位后发的原则,那么就让TXD首先拉低电平,持续一段时间,发送一位0,然后继续拉低,再持续一段时间,又发送了一位0,然后拉高电平,持续一段时间,发了一位1......一直到把8位二进制数字0b11100100全部发送完毕。这里就牵扯到了一个问题,就是持续的这“一段时间”到底是多久?从这里引入我们通信中的另外重要概念——波特率,也叫做比特率。
波特率就是发送一位二进制数据的速率,习惯上用baud表示,即我们发送一位数据的持续时间=1/baud。在通信之前,单片机1和单片机2首先都要明确的约定好他们之间的通信波特率,必须保持一致,收发双方才能正常实现通信,这一点大家一定要记清楚。
约定好速度后,我们还要考虑第二个问题,数据什么时候是起始,什么时候是结束呢?不管是提前接收还是延迟接收,数据都会接收错误。在UART串行通信的时候,一个字节是8位,规定当没有通信信号发生时,通信线路保持高电平,当要发送数据之前,先发一位0表示起始位,然后发送8位数据位,数据位是先低后高的顺序,数据位发完后再发一位1表示停止位。这样本来要发送一个字节8位数据,而实际上我们一共发送了10位,多出来的两位其中一位起始位,一位停止位。而接收方呢,原本一直保持的高电平,一旦检测到来了一位低电平,那就知道了要开始准备接收数据了,接收到8位数据位后,然后检测到停止位,再准备下一个数据的接收了。我们图示看一下,如图11-2所示。
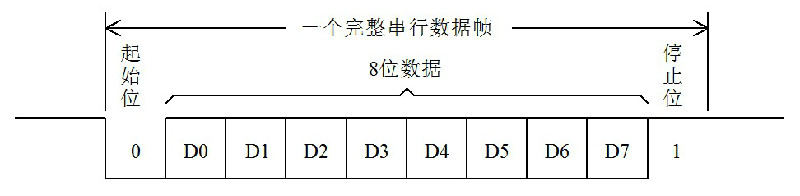 图11-2 串口数据发送示意图
像我们的图11-2串口数据发送示意图,实际上是一个时域示意图,就是信号随着时间变化的对应关系。比如在单片机的发送引脚上,左边的是先发生的,右边的是后发生的,数据位的切换时间就是波特率分之一秒,如果能够理解时域的概念,后边很多通信的时序图就很容易理解了。
11.2 串行RS232通信接口
在我们的台式电脑上,有一个9针的串行接口,这个串行接口叫做RS232接口,它和UART通信有关联,但是由于现在笔记本电脑都不带这种9针串口了,所以和单片机通信越来越趋向于使用USB虚拟的串口和单片机通信,因此这一节的内容作为了解内容,大家知道有这么回事就行。
我们先来认识一下这个标准串口,串口分为9针的和9孔的,习惯上我们也称之为公头和母头,如图11-3所示。
图11-2 串口数据发送示意图
像我们的图11-2串口数据发送示意图,实际上是一个时域示意图,就是信号随着时间变化的对应关系。比如在单片机的发送引脚上,左边的是先发生的,右边的是后发生的,数据位的切换时间就是波特率分之一秒,如果能够理解时域的概念,后边很多通信的时序图就很容易理解了。
11.2 串行RS232通信接口
在我们的台式电脑上,有一个9针的串行接口,这个串行接口叫做RS232接口,它和UART通信有关联,但是由于现在笔记本电脑都不带这种9针串口了,所以和单片机通信越来越趋向于使用USB虚拟的串口和单片机通信,因此这一节的内容作为了解内容,大家知道有这么回事就行。
我们先来认识一下这个标准串口,串口分为9针的和9孔的,习惯上我们也称之为公头和母头,如图11-3所示。
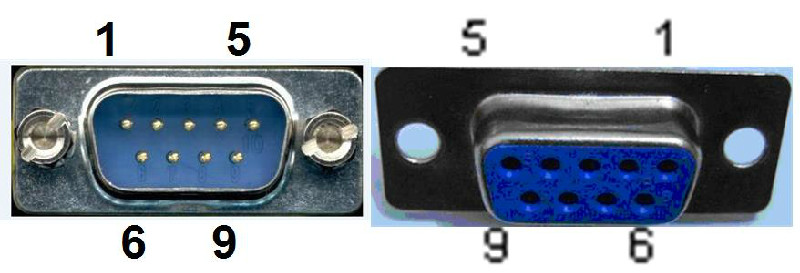 图11-3 RS232通信接口
RS232接口一共有9个引脚,分别定义是:1、载波检测(DCD);2、接收数据(RXD);3、发送数据(TXD);4、数据终端准备好(DTR);5、信号地线(SG);6、数据准备好(DSR);7、请求发送(RTS);8、清除发送(CTS);9、振铃提示(RI)。我们要让这个串口和我们单片机进行通信,我们只需要关心其中的2脚(RXD),3脚(TXD)和5脚(GND)。
虽然这三个脚的名字和我们单片机上的串口名字一样,但是却不能直接和单片机对连直接通信,这是为什么呢?随着我们了解的内容越来越多,我们得慢慢知道,不是所有的电路都是5V代表高电平而0V代表低电平的。对于RS232标准来说,它是个反逻辑,也叫做负逻辑。为何叫负逻辑?它的TXD和RXD的电压,-3V到-15V代表是1,3-15V之间的电压代表是0。低电平代表的是1,而高电平代表的是0,所以称之为负逻辑。因此电脑的9针232串口是不能和单片机直接连接的,需要用一个转换芯片MAX232来完成,如图11-4所示。
图11-3 RS232通信接口
RS232接口一共有9个引脚,分别定义是:1、载波检测(DCD);2、接收数据(RXD);3、发送数据(TXD);4、数据终端准备好(DTR);5、信号地线(SG);6、数据准备好(DSR);7、请求发送(RTS);8、清除发送(CTS);9、振铃提示(RI)。我们要让这个串口和我们单片机进行通信,我们只需要关心其中的2脚(RXD),3脚(TXD)和5脚(GND)。
虽然这三个脚的名字和我们单片机上的串口名字一样,但是却不能直接和单片机对连直接通信,这是为什么呢?随着我们了解的内容越来越多,我们得慢慢知道,不是所有的电路都是5V代表高电平而0V代表低电平的。对于RS232标准来说,它是个反逻辑,也叫做负逻辑。为何叫负逻辑?它的TXD和RXD的电压,-3V到-15V代表是1,3-15V之间的电压代表是0。低电平代表的是1,而高电平代表的是0,所以称之为负逻辑。因此电脑的9针232串口是不能和单片机直接连接的,需要用一个转换芯片MAX232来完成,如图11-4所示。
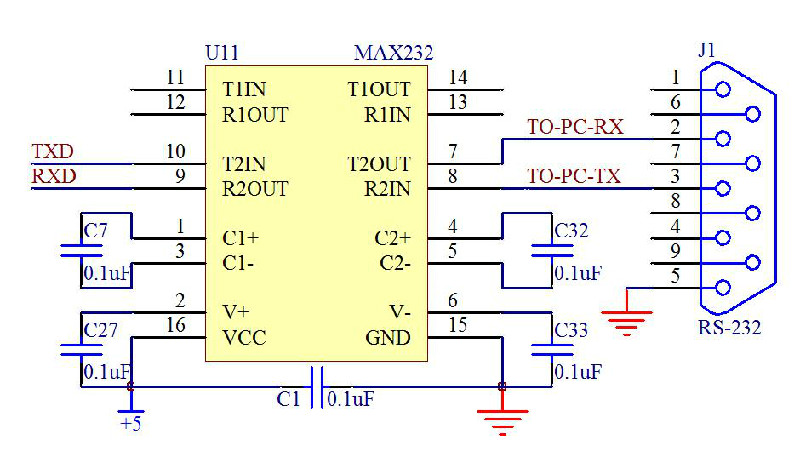 图11-4 MAX232转接图
这个芯片就可以实现把标准RS232串口电平转换成我们单片机能够识别和承受的UART 0V/5V电平标准。从这里大家似乎慢慢有点明白了,其实RS232串口和UART串口,他们的协议类型是一样,只是电平不同而已,而MAX232这个芯片起到的就是中间人的作用,他把UART电平转换成RS232电平,也把RS232电平转换成UART电平,从而实现标准RS232接口和单片机UART之间的通信连接。
11.3 USB转串口通信
随着技术的发展,工业上还有RS232串口通信的大量使用,但是商业技术的应用上,已经慢慢的使用USB转UART技术取代了RS232串口,绝大多数笔记本电脑已经没有串口这个东西了,那我们要实现单片机和电脑之间的通信该如何办呢?
我们只需要在我们电路上添加一个USB转串口芯片,就可以成功实现USB通信协议和标准UART串行通信协议的转换,在我们的开发板上,我们使用的是CH340T这个芯片,如图11-5所示。
图11-4 MAX232转接图
这个芯片就可以实现把标准RS232串口电平转换成我们单片机能够识别和承受的UART 0V/5V电平标准。从这里大家似乎慢慢有点明白了,其实RS232串口和UART串口,他们的协议类型是一样,只是电平不同而已,而MAX232这个芯片起到的就是中间人的作用,他把UART电平转换成RS232电平,也把RS232电平转换成UART电平,从而实现标准RS232接口和单片机UART之间的通信连接。
11.3 USB转串口通信
随着技术的发展,工业上还有RS232串口通信的大量使用,但是商业技术的应用上,已经慢慢的使用USB转UART技术取代了RS232串口,绝大多数笔记本电脑已经没有串口这个东西了,那我们要实现单片机和电脑之间的通信该如何办呢?
我们只需要在我们电路上添加一个USB转串口芯片,就可以成功实现USB通信协议和标准UART串行通信协议的转换,在我们的开发板上,我们使用的是CH340T这个芯片,如图11-5所示。
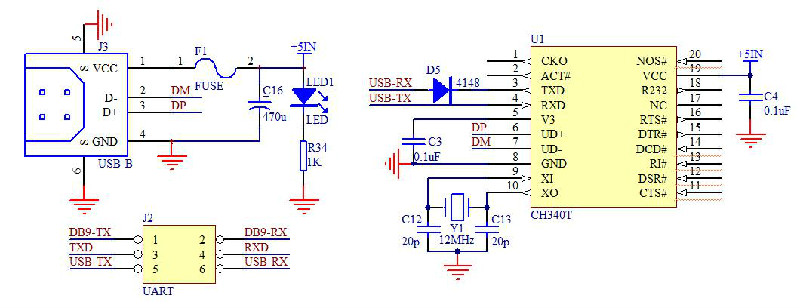 图11-5 USB转串口电路
左侧J2是一组跳线的组合,大家可以在我们板子左下角的跳线位置找到,我们是把3脚和5脚、4脚和6脚通过跳线帽短接到一起。右侧的CH340T这个电路很简单,把电源电路,晶振电路接好后,6脚和7脚的DP和DM分别接USB口的2个数据引脚上去,3脚和4脚通过跳线接到了我们单片机的TXD和RXD上去。
CH340T的电路里3脚位置加了个4148的二极管,是一个小技巧。因为我们的STC89C52RC这个单片机下载程序需要冷启动,就是先点下载后上电,上电瞬间单片机会先检测需要不需要下载程序。虽然单片机的VCC是由开关来控制,但是由于CH340T的3脚是输出引脚,如果没有此二极管,开关后级单片机在断电的情况下,CH340T的3脚和单片机的P3.0(即RXD)引脚连在一起,有电流会通过这个引脚流入后级电路并且给后级的电容充电,造成后级有一定幅度的电压,这个电压值虽然只有两三伏左右,但是可能会影响到我们的冷启动。加了二极管后,一方面不影响通信,另外一个方面还可以消除这种问题。这个地方可以暂时作为了解,大家如果自己做这块电路,可以参考一下。
11.4 IO口模拟UART串口通信
为了让大家充分理解UART串口通信的原理,我们先用P3.0和P3.1这两个当做IO口来进行模拟实际串口通信的过程,原理搞懂后,我们再使用寄存器配置实现串口通信过程。
对于UART串口波特率,常用的值是300、600、1200、2400、4800、9600、14400、19200、28800、38400、57600、115200、128000、256000等速率。IO口模拟UART串行通信程序是一个简单的演示程序,我们使用串口调试助手下发一个数据,数据加1后,再自动返回。串口调试助手,在我们进行全板子测试视频的时候,大家已经见过,这里我们直接使用STC-ISP软件自带的串口调试助手,可到www.51hei.com去下载此程序,先把串口调试助手使用给大家说一下,如图11-6所示。第一步要选择串口助手菜单,第二步选择十六进制显示,第三步选择十六进制发送,第四步选择COM口,这个COM口要和自己电脑设备管理器里的那个COM口一致,波特率是我们程序设定好的选择,我们程序中让一个数据位持续时间是1/9600秒,那这个地方选择波特率就是选9600,校验位选N,数据位8,停止位1。
图11-5 USB转串口电路
左侧J2是一组跳线的组合,大家可以在我们板子左下角的跳线位置找到,我们是把3脚和5脚、4脚和6脚通过跳线帽短接到一起。右侧的CH340T这个电路很简单,把电源电路,晶振电路接好后,6脚和7脚的DP和DM分别接USB口的2个数据引脚上去,3脚和4脚通过跳线接到了我们单片机的TXD和RXD上去。
CH340T的电路里3脚位置加了个4148的二极管,是一个小技巧。因为我们的STC89C52RC这个单片机下载程序需要冷启动,就是先点下载后上电,上电瞬间单片机会先检测需要不需要下载程序。虽然单片机的VCC是由开关来控制,但是由于CH340T的3脚是输出引脚,如果没有此二极管,开关后级单片机在断电的情况下,CH340T的3脚和单片机的P3.0(即RXD)引脚连在一起,有电流会通过这个引脚流入后级电路并且给后级的电容充电,造成后级有一定幅度的电压,这个电压值虽然只有两三伏左右,但是可能会影响到我们的冷启动。加了二极管后,一方面不影响通信,另外一个方面还可以消除这种问题。这个地方可以暂时作为了解,大家如果自己做这块电路,可以参考一下。
11.4 IO口模拟UART串口通信
为了让大家充分理解UART串口通信的原理,我们先用P3.0和P3.1这两个当做IO口来进行模拟实际串口通信的过程,原理搞懂后,我们再使用寄存器配置实现串口通信过程。
对于UART串口波特率,常用的值是300、600、1200、2400、4800、9600、14400、19200、28800、38400、57600、115200、128000、256000等速率。IO口模拟UART串行通信程序是一个简单的演示程序,我们使用串口调试助手下发一个数据,数据加1后,再自动返回。串口调试助手,在我们进行全板子测试视频的时候,大家已经见过,这里我们直接使用STC-ISP软件自带的串口调试助手,可到www.51hei.com去下载此程序,先把串口调试助手使用给大家说一下,如图11-6所示。第一步要选择串口助手菜单,第二步选择十六进制显示,第三步选择十六进制发送,第四步选择COM口,这个COM口要和自己电脑设备管理器里的那个COM口一致,波特率是我们程序设定好的选择,我们程序中让一个数据位持续时间是1/9600秒,那这个地方选择波特率就是选9600,校验位选N,数据位8,停止位1。
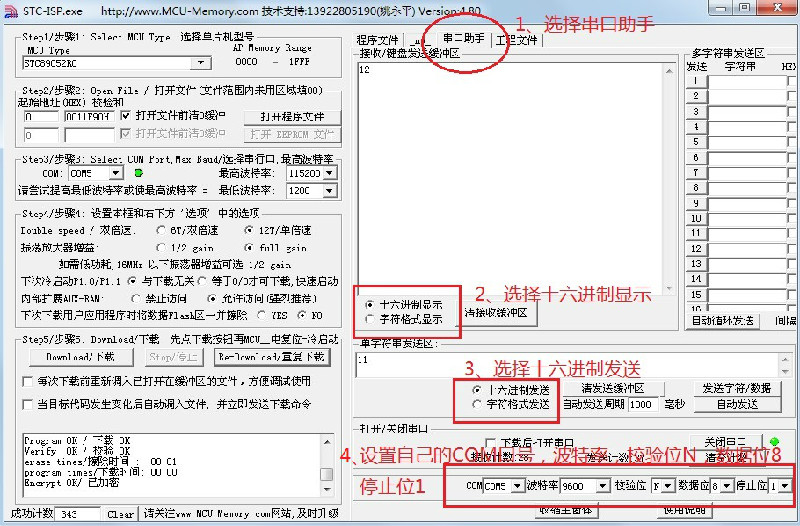 图11-6 串口调试助手示意图
串口调试助手的实质就是我们利用电脑上的UART通信接口,通过这个UART接口发送数据给我们的单片机,也可以把我们的单片机发送的数据接收到这个调试助手界面上。
因为初次接触通信方面的技术,所以我对这个程序进行一下解释,大家可以边看我的解释边看程序,把底层原理先彻底弄懂。
变量定义部分就不用说了,直接看main主函数。首先是对通信的波特率的设定,在这里我们配置的波特率是9600,那么串口调试助手也得是9600。配置波特率的时候,我们用的是定时器0的模式2。模式2中,不再是TH0代表高8位,TL0代表低8位了,而只有TL0在进行计数了。当TL0溢出后,不仅仅会让TF0变1,而且还会将TH0中的内容重新自动装到TL0中。这样有一个好处,我们可以把我们想要的定时器初值提前存在TH0中,当TL0溢出后,TH0自动把初值就重新送入TL0了,全自动的,不需要程序上再给TL0重新赋值了,配置方式很简单,大家可以自己看下程序并且计算一下初值。
波特率设置好以后,打开中断,然后等待接收串口调试助手下发的数据。接收数据的时候,首先要进行低电平检测 while (PIN_RXD),若没有低电平则说明没有数据,一旦检测到低电平,就进入启动接收函数StartRXD()。接收函数最开始启动半个波特率周期,初学可能这里不是很明白。大家回头看一下我们的图11-2里边的串口数据示意图,信号在数据位电平变化的时候去读,因为时序上的误差以及信号稳定性的问题很容易读错数据,所以我们希望在信号最稳定的时候去读数据。除了信号变化的那个沿的位置外,其他位置都很稳定,那么我们现在就约定在信号中间位置去读取电平状态,这样能够保证我们信号读的是对的。
一旦读到了起始信号,我们就把当前状态设定成接受状态,并且打开定时器中断,第一次是半个周期进入中断后,对起始位进行二次判断一下,确认一下起始位是低电平,而不是一个干扰信号。以后每经过9600分之一秒进入一次中断,并且把这个引脚的状态读到RxdBuf里边。等待接收完毕之后,我们再把这个RxdBuf加1,再通过TXD引脚发送出去,同样需要先发一位起始位,然后发8个数据位,再发结束位,发送完毕后,程序运行到while
(PIN_RXD),等待第二轮信号接收的开始。
#include
图11-6 串口调试助手示意图
串口调试助手的实质就是我们利用电脑上的UART通信接口,通过这个UART接口发送数据给我们的单片机,也可以把我们的单片机发送的数据接收到这个调试助手界面上。
因为初次接触通信方面的技术,所以我对这个程序进行一下解释,大家可以边看我的解释边看程序,把底层原理先彻底弄懂。
变量定义部分就不用说了,直接看main主函数。首先是对通信的波特率的设定,在这里我们配置的波特率是9600,那么串口调试助手也得是9600。配置波特率的时候,我们用的是定时器0的模式2。模式2中,不再是TH0代表高8位,TL0代表低8位了,而只有TL0在进行计数了。当TL0溢出后,不仅仅会让TF0变1,而且还会将TH0中的内容重新自动装到TL0中。这样有一个好处,我们可以把我们想要的定时器初值提前存在TH0中,当TL0溢出后,TH0自动把初值就重新送入TL0了,全自动的,不需要程序上再给TL0重新赋值了,配置方式很简单,大家可以自己看下程序并且计算一下初值。
波特率设置好以后,打开中断,然后等待接收串口调试助手下发的数据。接收数据的时候,首先要进行低电平检测 while (PIN_RXD),若没有低电平则说明没有数据,一旦检测到低电平,就进入启动接收函数StartRXD()。接收函数最开始启动半个波特率周期,初学可能这里不是很明白。大家回头看一下我们的图11-2里边的串口数据示意图,信号在数据位电平变化的时候去读,因为时序上的误差以及信号稳定性的问题很容易读错数据,所以我们希望在信号最稳定的时候去读数据。除了信号变化的那个沿的位置外,其他位置都很稳定,那么我们现在就约定在信号中间位置去读取电平状态,这样能够保证我们信号读的是对的。
一旦读到了起始信号,我们就把当前状态设定成接受状态,并且打开定时器中断,第一次是半个周期进入中断后,对起始位进行二次判断一下,确认一下起始位是低电平,而不是一个干扰信号。以后每经过9600分之一秒进入一次中断,并且把这个引脚的状态读到RxdBuf里边。等待接收完毕之后,我们再把这个RxdBuf加1,再通过TXD引脚发送出去,同样需要先发一位起始位,然后发8个数据位,再发结束位,发送完毕后,程序运行到while
(PIN_RXD),等待第二轮信号接收的开始。
#include
sbit PIN_RXD = P3^0; //接收引脚定义
sbit PIN_TXD = P3^1; //发送引脚定义
bit RxdOrTxd = 0; //指示当前状态为接收还是发送
bit RxdEnd = 0; //接收结束标志
bit TxdEnd = 0; //发送结束标志
unsigned char RxdBuf = 0; //接收缓冲器
unsigned char TxdBuf = 0; //发送缓冲器
void ConfigUART(unsigned int baud);
void StartTXD(unsigned char dat);
void StartRXD();
void main ()
{
ConfigUART(9600); //配置波特率为9600
EA = 1; //开总中断
while(1) { while (PIN_RXD); //等待接收引脚出现低电平,即起始位 StartRXD(); //启动接收 while (!RxdEnd); //等待接收完成 StartTXD(RxdBuf+1); //接收到的数据+1后,发送回去 while (!TxdEnd); //等待发送完成 } } void ConfigUART(unsigned int baud) //串口配置函数,baud为波特率 { TMOD &= 0xF0; //清零T0的控制位 TMOD |= 0x02; //配置T0为模式2 TH0 = 256 - (11059200/12) / baud; //计算T0重载值 } void StartRXD() //启动串行接收 { TL0 = 256 - ((256-TH0) >> 1); //接收启动时的T0定时为半个波特率周期 ET0 = 1; //使能T0中断 TR0 = 1; //启动T0 RxdEnd = 0; //清零接收结束标志 RxdOrTxd = 0; //设置当前状态为接收 } void StartTXD(unsigned char dat) //启动串行发送,dat为待发送字节数据 { TxdBuf = dat; //待发送数据保存到发送缓冲器 TL0 = TH0; //T0计数初值为重载值 ET0 = 1; //使能T0中断 TR0 = 1; //启动T0 PIN_TXD = 0; //发送起始位 TxdEnd = 0; //清零发送结束标志 RxdOrTxd = 1; //设置当前状态为发送 } void InterruptTimer0() interrupt 1 //T0中断服务函数,处理串行发送和接收 { static unsigned char cnt = 0; //bit计数器,记录当前正在处理的位 if (RxdOrTxd) //串行发送处理 { cnt++; if (cnt <= 8) //低位在先依次发送8bit数据位 { PIN_TXD = TxdBuf & 0x01; TxdBuf >>= 1; } else if (cnt == 9) //发送停止位 { PIN_TXD = 1; } else //发送结束 { cnt = 0; //复位bit计数器 TR0 = 0; //关闭T0 TxdEnd = 1; //置发送结束标志 } } else //串行接收处理 { if (cnt == 0) //处理起始位 { if (!PIN_RXD) //起始位为0时,清零接收缓冲器,准备接收数据位 { RxdBuf = 0; cnt++; } else //起始位不为0时,中止接收 { TR0 = 0; //关闭T0 } } else if (cnt <= 8) //处理8位数据位 { RxdBuf >>= 1; //低位在先,所以将之前接收的位向右移 if (PIN_RXD) //接收脚为1时,缓冲器最高位置1;为0时不处理即仍保持移位后的0 { RxdBuf |= 0x80; } cnt++; } else //停止位处理 { cnt = 0; //复位bit计数器 TR0 = 0; //关闭T0 if (PIN_RXD) //停止位为1时,方能认为数据有效 { RxdEnd = 1; //置接收结束标志 } } } } 同学们通过学习我们的程序,也慢慢感受到了,程序的延时部分已经不再使用简单的delay来完成了,我们要通过我们的程序编写积累,慢慢提高自己灵活运用定时器的能力。一个小小的定时器,可以帮我们完成很多很多工作。 11.5 UART串口通信的基本应用11.5.1 通信的三种基本类型 我们常用的通信通常可以分为单工、半双工、全双工通信。 单工就是指只允许一方向另外一方传送信息,而另一方不能回传信息。比如我们的电视遥控器,我们的收音机广播等,都是单工通信技术。 半双工是指数据可以在双方之间相互传播,但是同一时刻只能其中一方发给另外一方,比如我们的对讲机就是典型的半双工。 全双工通信就发送数据的同时也能够接受数据,两者同步进行,就如同我们的电话一样,我们说话的同时也可以听到对方的声音。 11.5.2 UART模块介绍 IO口模拟串口通信,大家了解了串口通信的实质,但是我们的单片机程序却需要不停的检测扫描单片机IO口收到的数据,大量占用了CPU资源。这时候就会有聪明人想了,其实我们不是很关心通信的过程,我们只需要一个通信的结果,最终得到接收到的数据就行了。这样我们可以在单片机内部做一个硬件模块,让他自动接收数据,接收完了,通知我们一下就可以了,我们的51单片机内部就存在这样一个UART模块,要正确使用它,当然还得先把对应的特殊功能寄存器配置好。 51单片机的UART串行口的结构由串行口控制寄存器SCON、发送和接收电路三部分构成,先来了解一下串口控制寄存器SCON。 表11-1 SCON--串行控制寄存器的位分配(地址:98H) 可位寻址;复位值:0x00;复位源:任何复位 位 7 6 5 4 3 2 1 0 符号 SM0 SM1 SM2 REN TB8 RB8 TI RI 表11-2 SCON--串行控制寄存器的位描述 位 符号 描述 7 SM0 这两位共同决定了串口通信的模式0到模式3共4种模式。我们最常用的就是模式1,也就是SM0=0,SM1=1,下边我们重点就讲模式1,其他模式从略。 6 SM1 5 SM2 多机通信控制位(很少用),模式1直接清零。 4 REN 使能串行接收。由软件置位使能接收,软件清零则禁止接收 3 TB8 模式2和3中将要发送的第9位数据(很少用) 2 RB8 模式2和3中接收第9位数据(很少用),模式1用来接收停止位 1 TI 发送中断标志位,模式1下,在数据位最后一位发送结束,开始发送停止位时由硬件自动置1,必须通过软件清零。也就是说,再发送前我们清零TI,发送数据,数据发送到停止位时,TI硬件置1,方便我们CPU查询发送完毕状态。 0 RI 接收中断标志位,当接收电路接收到停止位的中间位置时,RI
图11-1 单片机之间UART通信示意图
图中,GND表示单片机系统电源的参考地,TXD是串行发送引脚,RXD是串行接收引脚。两个单片机之间要通信,首先电源基准得一样,所以我们要把两个单片机的GND相互连起来,然后单片机1的TXD引脚接到单片机2的RXD引脚上,即此路为单片机1发送而单片机2接收的通道,单片机1的RXD引脚接到单片机2的TXD引脚上,即此路为单片机2发送而单片机2接收的通道。这个示意图就体现了两个单片机各自收发信息的过程。
当单片机1想给单片机2发送数据时,比如发送一个0xE4这个数据,用二进制形式表示就是0b11100100,在UART通信过程中,是低位先发,高位后发的原则,那么就让TXD首先拉低电平,持续一段时间,发送一位0,然后继续拉低,再持续一段时间,又发送了一位0,然后拉高电平,持续一段时间,发了一位1......一直到把8位二进制数字0b11100100全部发送完毕。这里就牵扯到了一个问题,就是持续的这“一段时间”到底是多久?从这里引入我们通信中的另外重要概念——波特率,也叫做比特率。
波特率就是发送一位二进制数据的速率,习惯上用baud表示,即我们发送一位数据的持续时间=1/baud。在通信之前,单片机1和单片机2首先都要明确的约定好他们之间的通信波特率,必须保持一致,收发双方才能正常实现通信,这一点大家一定要记清楚。
约定好速度后,我们还要考虑第二个问题,数据什么时候是起始,什么时候是结束呢?不管是提前接收还是延迟接收,数据都会接收错误。在UART串行通信的时候,一个字节是8位,规定当没有通信信号发生时,通信线路保持高电平,当要发送数据之前,先发一位0表示起始位,然后发送8位数据位,数据位是先低后高的顺序,数据位发完后再发一位1表示停止位。这样本来要发送一个字节8位数据,而实际上我们一共发送了10位,多出来的两位其中一位起始位,一位停止位。而接收方呢,原本一直保持的高电平,一旦检测到来了一位低电平,那就知道了要开始准备接收数据了,接收到8位数据位后,然后检测到停止位,再准备下一个数据的接收了。我们图示看一下,如图11-2所示。
图11-2 串口数据发送示意图
像我们的图11-2串口数据发送示意图,实际上是一个时域示意图,就是信号随着时间变化的对应关系。比如在单片机的发送引脚上,左边的是先发生的,右边的是后发生的,数据位的切换时间就是波特率分之一秒,如果能够理解时域的概念,后边很多通信的时序图就很容易理解了。
11.2 串行RS232通信接口
在我们的台式电脑上,有一个9针的串行接口,这个串行接口叫做RS232接口,它和UART通信有关联,但是由于现在笔记本电脑都不带这种9针串口了,所以和单片机通信越来越趋向于使用USB虚拟的串口和单片机通信,因此这一节的内容作为了解内容,大家知道有这么回事就行。
我们先来认识一下这个标准串口,串口分为9针的和9孔的,习惯上我们也称之为公头和母头,如图11-3所示。
图11-3 RS232通信接口
RS232接口一共有9个引脚,分别定义是:1、载波检测(DCD);2、接收数据(RXD);3、发送数据(TXD);4、数据终端准备好(DTR);5、信号地线(SG);6、数据准备好(DSR);7、请求发送(RTS);8、清除发送(CTS);9、振铃提示(RI)。我们要让这个串口和我们单片机进行通信,我们只需要关心其中的2脚(RXD),3脚(TXD)和5脚(GND)。
虽然这三个脚的名字和我们单片机上的串口名字一样,但是却不能直接和单片机对连直接通信,这是为什么呢?随着我们了解的内容越来越多,我们得慢慢知道,不是所有的电路都是5V代表高电平而0V代表低电平的。对于RS232标准来说,它是个反逻辑,也叫做负逻辑。为何叫负逻辑?它的TXD和RXD的电压,-3V到-15V代表是1,3-15V之间的电压代表是0。低电平代表的是1,而高电平代表的是0,所以称之为负逻辑。因此电脑的9针232串口是不能和单片机直接连接的,需要用一个转换芯片MAX232来完成,如图11-4所示。
图11-4 MAX232转接图
这个芯片就可以实现把标准RS232串口电平转换成我们单片机能够识别和承受的UART 0V/5V电平标准。从这里大家似乎慢慢有点明白了,其实RS232串口和UART串口,他们的协议类型是一样,只是电平不同而已,而MAX232这个芯片起到的就是中间人的作用,他把UART电平转换成RS232电平,也把RS232电平转换成UART电平,从而实现标准RS232接口和单片机UART之间的通信连接。
11.3 USB转串口通信
随着技术的发展,工业上还有RS232串口通信的大量使用,但是商业技术的应用上,已经慢慢的使用USB转UART技术取代了RS232串口,绝大多数笔记本电脑已经没有串口这个东西了,那我们要实现单片机和电脑之间的通信该如何办呢?
我们只需要在我们电路上添加一个USB转串口芯片,就可以成功实现USB通信协议和标准UART串行通信协议的转换,在我们的开发板上,我们使用的是CH340T这个芯片,如图11-5所示。
图11-5 USB转串口电路
左侧J2是一组跳线的组合,大家可以在我们板子左下角的跳线位置找到,我们是把3脚和5脚、4脚和6脚通过跳线帽短接到一起。右侧的CH340T这个电路很简单,把电源电路,晶振电路接好后,6脚和7脚的DP和DM分别接USB口的2个数据引脚上去,3脚和4脚通过跳线接到了我们单片机的TXD和RXD上去。
CH340T的电路里3脚位置加了个4148的二极管,是一个小技巧。因为我们的STC89C52RC这个单片机下载程序需要冷启动,就是先点下载后上电,上电瞬间单片机会先检测需要不需要下载程序。虽然单片机的VCC是由开关来控制,但是由于CH340T的3脚是输出引脚,如果没有此二极管,开关后级单片机在断电的情况下,CH340T的3脚和单片机的P3.0(即RXD)引脚连在一起,有电流会通过这个引脚流入后级电路并且给后级的电容充电,造成后级有一定幅度的电压,这个电压值虽然只有两三伏左右,但是可能会影响到我们的冷启动。加了二极管后,一方面不影响通信,另外一个方面还可以消除这种问题。这个地方可以暂时作为了解,大家如果自己做这块电路,可以参考一下。
11.4 IO口模拟UART串口通信
为了让大家充分理解UART串口通信的原理,我们先用P3.0和P3.1这两个当做IO口来进行模拟实际串口通信的过程,原理搞懂后,我们再使用寄存器配置实现串口通信过程。
对于UART串口波特率,常用的值是300、600、1200、2400、4800、9600、14400、19200、28800、38400、57600、115200、128000、256000等速率。IO口模拟UART串行通信程序是一个简单的演示程序,我们使用串口调试助手下发一个数据,数据加1后,再自动返回。串口调试助手,在我们进行全板子测试视频的时候,大家已经见过,这里我们直接使用STC-ISP软件自带的串口调试助手,可到www.51hei.com去下载此程序,先把串口调试助手使用给大家说一下,如图11-6所示。第一步要选择串口助手菜单,第二步选择十六进制显示,第三步选择十六进制发送,第四步选择COM口,这个COM口要和自己电脑设备管理器里的那个COM口一致,波特率是我们程序设定好的选择,我们程序中让一个数据位持续时间是1/9600秒,那这个地方选择波特率就是选9600,校验位选N,数据位8,停止位1。
图11-6 串口调试助手示意图
串口调试助手的实质就是我们利用电脑上的UART通信接口,通过这个UART接口发送数据给我们的单片机,也可以把我们的单片机发送的数据接收到这个调试助手界面上。
因为初次接触通信方面的技术,所以我对这个程序进行一下解释,大家可以边看我的解释边看程序,把底层原理先彻底弄懂。
变量定义部分就不用说了,直接看main主函数。首先是对通信的波特率的设定,在这里我们配置的波特率是9600,那么串口调试助手也得是9600。配置波特率的时候,我们用的是定时器0的模式2。模式2中,不再是TH0代表高8位,TL0代表低8位了,而只有TL0在进行计数了。当TL0溢出后,不仅仅会让TF0变1,而且还会将TH0中的内容重新自动装到TL0中。这样有一个好处,我们可以把我们想要的定时器初值提前存在TH0中,当TL0溢出后,TH0自动把初值就重新送入TL0了,全自动的,不需要程序上再给TL0重新赋值了,配置方式很简单,大家可以自己看下程序并且计算一下初值。
波特率设置好以后,打开中断,然后等待接收串口调试助手下发的数据。接收数据的时候,首先要进行低电平检测 while (PIN_RXD),若没有低电平则说明没有数据,一旦检测到低电平,就进入启动接收函数StartRXD()。接收函数最开始启动半个波特率周期,初学可能这里不是很明白。大家回头看一下我们的图11-2里边的串口数据示意图,信号在数据位电平变化的时候去读,因为时序上的误差以及信号稳定性的问题很容易读错数据,所以我们希望在信号最稳定的时候去读数据。除了信号变化的那个沿的位置外,其他位置都很稳定,那么我们现在就约定在信号中间位置去读取电平状态,这样能够保证我们信号读的是对的。
一旦读到了起始信号,我们就把当前状态设定成接受状态,并且打开定时器中断,第一次是半个周期进入中断后,对起始位进行二次判断一下,确认一下起始位是低电平,而不是一个干扰信号。以后每经过9600分之一秒进入一次中断,并且把这个引脚的状态读到RxdBuf里边。等待接收完毕之后,我们再把这个RxdBuf加1,再通过TXD引脚发送出去,同样需要先发一位起始位,然后发8个数据位,再发结束位,发送完毕后,程序运行到while
(PIN_RXD),等待第二轮信号接收的开始。
#include while(1) { while (PIN_RXD); //等待接收引脚出现低电平,即起始位 StartRXD(); //启动接收 while (!RxdEnd); //等待接收完成 StartTXD(RxdBuf+1); //接收到的数据+1后,发送回去 while (!TxdEnd); //等待发送完成 } } void ConfigUART(unsigned int baud) //串口配置函数,baud为波特率 { TMOD &= 0xF0; //清零T0的控制位 TMOD |= 0x02; //配置T0为模式2 TH0 = 256 - (11059200/12) / baud; //计算T0重载值 } void StartRXD() //启动串行接收 { TL0 = 256 - ((256-TH0) >> 1); //接收启动时的T0定时为半个波特率周期 ET0 = 1; //使能T0中断 TR0 = 1; //启动T0 RxdEnd = 0; //清零接收结束标志 RxdOrTxd = 0; //设置当前状态为接收 } void StartTXD(unsigned char dat) //启动串行发送,dat为待发送字节数据 { TxdBuf = dat; //待发送数据保存到发送缓冲器 TL0 = TH0; //T0计数初值为重载值 ET0 = 1; //使能T0中断 TR0 = 1; //启动T0 PIN_TXD = 0; //发送起始位 TxdEnd = 0; //清零发送结束标志 RxdOrTxd = 1; //设置当前状态为发送 } void InterruptTimer0() interrupt 1 //T0中断服务函数,处理串行发送和接收 { static unsigned char cnt = 0; //bit计数器,记录当前正在处理的位 if (RxdOrTxd) //串行发送处理 { cnt++; if (cnt <= 8) //低位在先依次发送8bit数据位 { PIN_TXD = TxdBuf & 0x01; TxdBuf >>= 1; } else if (cnt == 9) //发送停止位 { PIN_TXD = 1; } else //发送结束 { cnt = 0; //复位bit计数器 TR0 = 0; //关闭T0 TxdEnd = 1; //置发送结束标志 } } else //串行接收处理 { if (cnt == 0) //处理起始位 { if (!PIN_RXD) //起始位为0时,清零接收缓冲器,准备接收数据位 { RxdBuf = 0; cnt++; } else //起始位不为0时,中止接收 { TR0 = 0; //关闭T0 } } else if (cnt <= 8) //处理8位数据位 { RxdBuf >>= 1; //低位在先,所以将之前接收的位向右移 if (PIN_RXD) //接收脚为1时,缓冲器最高位置1;为0时不处理即仍保持移位后的0 { RxdBuf |= 0x80; } cnt++; } else //停止位处理 { cnt = 0; //复位bit计数器 TR0 = 0; //关闭T0 if (PIN_RXD) //停止位为1时,方能认为数据有效 { RxdEnd = 1; //置接收结束标志 } } } } 同学们通过学习我们的程序,也慢慢感受到了,程序的延时部分已经不再使用简单的delay来完成了,我们要通过我们的程序编写积累,慢慢提高自己灵活运用定时器的能力。一个小小的定时器,可以帮我们完成很多很多工作。 11.5 UART串口通信的基本应用11.5.1 通信的三种基本类型 我们常用的通信通常可以分为单工、半双工、全双工通信。 单工就是指只允许一方向另外一方传送信息,而另一方不能回传信息。比如我们的电视遥控器,我们的收音机广播等,都是单工通信技术。 半双工是指数据可以在双方之间相互传播,但是同一时刻只能其中一方发给另外一方,比如我们的对讲机就是典型的半双工。 全双工通信就发送数据的同时也能够接受数据,两者同步进行,就如同我们的电话一样,我们说话的同时也可以听到对方的声音。 11.5.2 UART模块介绍 IO口模拟串口通信,大家了解了串口通信的实质,但是我们的单片机程序却需要不停的检测扫描单片机IO口收到的数据,大量占用了CPU资源。这时候就会有聪明人想了,其实我们不是很关心通信的过程,我们只需要一个通信的结果,最终得到接收到的数据就行了。这样我们可以在单片机内部做一个硬件模块,让他自动接收数据,接收完了,通知我们一下就可以了,我们的51单片机内部就存在这样一个UART模块,要正确使用它,当然还得先把对应的特殊功能寄存器配置好。 51单片机的UART串行口的结构由串行口控制寄存器SCON、发送和接收电路三部分构成,先来了解一下串口控制寄存器SCON。 表11-1 SCON--串行控制寄存器的位分配(地址:98H) 可位寻址;复位值:0x00;复位源:任何复位 位 7 6 5 4 3 2 1 0 符号 SM0 SM1 SM2 REN TB8 RB8 TI RI 表11-2 SCON--串行控制寄存器的位描述 位 符号 描述 7 SM0 这两位共同决定了串口通信的模式0到模式3共4种模式。我们最常用的就是模式1,也就是SM0=0,SM1=1,下边我们重点就讲模式1,其他模式从略。 6 SM1 5 SM2 多机通信控制位(很少用),模式1直接清零。 4 REN 使能串行接收。由软件置位使能接收,软件清零则禁止接收 3 TB8 模式2和3中将要发送的第9位数据(很少用) 2 RB8 模式2和3中接收第9位数据(很少用),模式1用来接收停止位 1 TI 发送中断标志位,模式1下,在数据位最后一位发送结束,开始发送停止位时由硬件自动置1,必须通过软件清零。也就是说,再发送前我们清零TI,发送数据,数据发送到停止位时,TI硬件置1,方便我们CPU查询发送完毕状态。 0 RI 接收中断标志位,当接收电路接收到停止位的中间位置时,RI