{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 yyw_0429 的文章《教你在单片机上套公式实现卡尔曼滤波器》','https://www.xiaopingtou.net/article-62981.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}


#ifndef _KALMAN_H_#define _KALMAN_H_
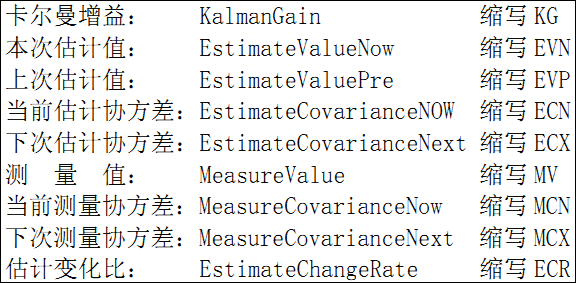
extern KalmanGain;// 卡尔曼增益
extern EstimateCovariance;//估计协方差
extern MeasureCovariance;//测量协方差
extern EstimateValue;//估计值
extern void KalmanFilterInit(void);
extern KalmanFilter( Measure);
#endif
#include "config.h"
#include "math.h"
KalmanGain;// 卡尔曼增益
EstimateCovariance;//估计协方差
MeasureCovariance;//测量协方差
EstimateValue;//估计值
void KalmanFilterInit(void);
extern float KalmanFilter(float Measure);
void KalmanFilterInit(void)
{
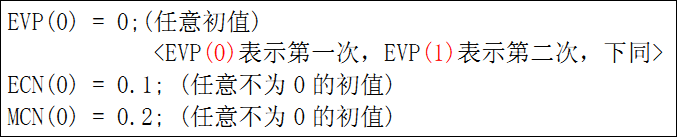
EstimateValue=0;
EstimateCovariance=0.1;
MeasureCovariance=0.02;
}
KalmanFilter( Measure)
{
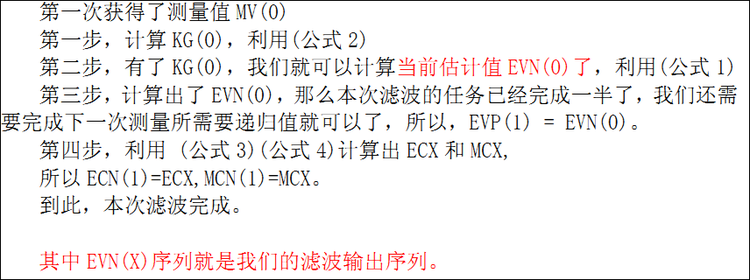
//计算卡尔曼增益
KalmanGain=EstimateCovariance*sqrt(1/(EstimateCovariance*EstimateCovariance+MeasureCovariance*MeasureCovariance));
//计算本次滤波估计值
EstimateValue=EstimateValue+KalmanGain*(Measure-EstimateValue);
//更新估计协方差
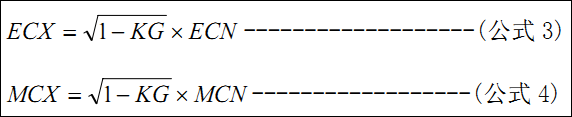
EstimateCovariance=sqrt(1-KalmanGain)*EstimateCovariance;
//更新测量方差
MeasureCovariance=sqrt(1-KalmanGain)*MeasureCovariance;
//返回估计值
return EstimateValue;
}