在单片机入门学习三 51单片机学习二 中已经说了串口通讯的基本原理,本篇主要记录stm32中的串口通讯。
通讯标准
引脚说明
通信方式
通信方向
UART
(通用一步收发器) TXD:发送端
RXD接收端
GND公共地 异步通讯 全双工 单总线
(1-wire) DQ:发送/接收端 异步通讯 半双工 SPI SCK:同步时钟
MISO:主机输入,从机输出
MOSI:主机输出,从机输入 同步通讯 全双工 I²C SCL:同步时钟
SDA:数据输入/输出端 同步通讯 半双工 stm32的串口通信接口(stm32f10x系列芯片,包含3个USART、2个UART)

② 单片机连接PC

PC机使用的是RS232电平标准,而单片机采用的是 TTL电平,所以需要 连接一个RS232转换器 将TTL电平转换成 PC可以识别的RS232电平
外部设备将数据发送到 串行输入移位寄存器,串行输入移位寄存器在将数据传送到输入数据缓冲器,MCU在从输入数据缓冲器中读出数据

② 数据发送过程
MCU将要发送的数据写入输出数据缓冲器,输出数据缓冲器在将数据写入串行输出移位寄存器,串行移位寄存器在将数据输出到外部设备

它支持同步单向通信和半双工单线通信,也支持LIN(局部互连网),智能卡协议和IrDA(红外数据组织)SIR ENDEC规范,以及调制解调器(CTS/RTS)操作。它还允许多处理器通信。
使用多缓冲器配置的DMA方式,可以实现高速数据通信。 任何USART双向通信至少需要两个脚:接收数据输入(RX)和发送数据输出(TX)。
RX:接收数据串行输。通过过采样技术来区别数据和噪音,从而恢复数据。
TX:发送数据输出。当发送器被禁止时,输出引脚恢复到它的I/O端口配置。当发送器被激活,并且不发送数据时,TX引脚处于高电平。在单线和智能卡模式里,此I/O口被同时用于数据的发送和接收。
● 总线在发送或接收前应处于空闲状态
● 一个起始位
● 一个数据字(8或9位),最低有效位在前
● 0.5,1.5,2个的停止位,由此表明数据帧的结束
● 使用分数波特率发生器 —— 12位整数和4位小数的表示方法。
● 一个状态寄存器(USART_SR)
● 数据寄存器(USART_DR)
● 一个波特率寄存器(USART_BRR),12位的整数和4位小数
● 一个智能卡模式下的保护时间寄存器(USART_GTPR) 下图是USART通讯的示意图
 下图是STM32串口异步通信需要定义的参数
下图是STM32串口异步通信需要定义的参数
STM32异步通信参数:
①起始位
②数据位(8位或者9位)
③奇偶校验位(第9位)
④停止位(1,15,2位)
⑤波特率设置
 上图中红 {MOD}的线表示 芯片读取 PC端发送的信息,绿 {MOD}的线表示 发送数据到PC,枚红 {MOD}的线表示 时钟线。
上图中红 {MOD}的线表示 芯片读取 PC端发送的信息,绿 {MOD}的线表示 发送数据到PC,枚红 {MOD}的线表示 时钟线。
USART_DR数据寄存器

USART_BRR波特率寄存器

波特率计算方法:
void USART_Cmd();//使能串口
void USART_ITConfig();//使能相关中断 void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);//发送数据到串口,DR
uint16_t uint16_t USART_ReceiveData(USART_TypeDef* USARTx);//接受数据,从DR读取接受到的数据 FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);//获取状态标志位 读取的是USART_SR寄存器
void USART_ClearFlag();//清除状态标志位
ITStatus USART_GetITStatus();//获取中断状态标志位
void USART_ClearITPendingBit();//清除中断状态标志位
②串口复位:USART_DeInit(); 这一步不是必须的
③GPIO端口模式设置:GPIO_Init(); 模式设置为GPIO_Mode_AF_PP(RX),GPIO_Mode_AF_Float(TX)
④串口参数初始化:USART_Init();
⑤开启中断并且初始化NVIC(如果需要开启中断才需要这个步骤)
NVIC_Init();
USART_ITConfig();
⑥使能串口:USART_Cmd();
⑦编写中断处理函数:USARTx_IRQHandler();
⑧串口数据收发:
void USART_SendData();//发送数据到串口,DR
uint16_t USART_ReceiveData();//接受数据,从DR读取接受到的数据
⑨串口传输状态获取:
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
1、串口通讯基础简单回顾
1)串口通讯通讯方式
- 同步通信:带时钟同步信号传输。SPI,I²C通信接口
- 异步通信:不带时钟同步信号。UART(通用异步收发器),单总线
2)串行通讯接口
(通用一步收发器) TXD:发送端
RXD接收端
GND公共地 异步通讯 全双工 单总线
(1-wire) DQ:发送/接收端 异步通讯 半双工 SPI SCK:同步时钟
MISO:主机输入,从机输出
MOSI:主机输出,从机输入 同步通讯 全双工 I²C SCL:同步时钟
SDA:数据输入/输出端 同步通讯 半双工 stm32的串口通信接口(stm32f10x系列芯片,包含3个USART、2个UART)
- UART:通用异步收发器
- USART:通用同步异步收发器
3)UART引脚连接方法
① 单片机连接单片机 ② 单片机连接PC
PC机使用的是RS232电平标准,而单片机采用的是 TTL电平,所以需要 连接一个RS232转换器 将TTL电平转换成 PC可以识别的RS232电平
4)UART异步通信特点
- 全双工异步通信。
- 分数波特率发生器系统,提供精确的波特率。发送和接受共用的可编程波特率,最高可达4.5Mbits/s
- 可编程的数据字长度(8位或者9位);
- 可配置的停止位(支持1或者2位停止位);
- 可配置的使用DMA多缓冲器通信。
- 单独的发送器和接收器使能位。
- 检测标志:① 接受缓冲器 ②发送缓冲器空 ③传输结束标志
- 多个带标志的中断源。触发中断。
5)串口通信过程
① 数据接收过程外部设备将数据发送到 串行输入移位寄存器,串行输入移位寄存器在将数据传送到输入数据缓冲器,MCU在从输入数据缓冲器中读出数据
② 数据发送过程
MCU将要发送的数据写入输出数据缓冲器,输出数据缓冲器在将数据写入串行输出移位寄存器,串行移位寄存器在将数据输出到外部设备
6)USART概述
通用同步异步收发器(USART)提供了一种灵活的方法与使用工业标准NRZ异步串行数据格式的外部设备之间进行全双工数据交换。USART利用分数波特率发生器提供宽范围的波特率选择。它支持同步单向通信和半双工单线通信,也支持LIN(局部互连网),智能卡协议和IrDA(红外数据组织)SIR ENDEC规范,以及调制解调器(CTS/RTS)操作。它还允许多处理器通信。
使用多缓冲器配置的DMA方式,可以实现高速数据通信。 任何USART双向通信至少需要两个脚:接收数据输入(RX)和发送数据输出(TX)。
RX:接收数据串行输。通过过采样技术来区别数据和噪音,从而恢复数据。
TX:发送数据输出。当发送器被禁止时,输出引脚恢复到它的I/O端口配置。当发送器被激活,并且不发送数据时,TX引脚处于高电平。在单线和智能卡模式里,此I/O口被同时用于数据的发送和接收。
● 总线在发送或接收前应处于空闲状态
● 一个起始位
● 一个数据字(8或9位),最低有效位在前
● 0.5,1.5,2个的停止位,由此表明数据帧的结束
● 使用分数波特率发生器 —— 12位整数和4位小数的表示方法。
● 一个状态寄存器(USART_SR)
● 数据寄存器(USART_DR)
● 一个波特率寄存器(USART_BRR),12位的整数和4位小数
● 一个智能卡模式下的保护时间寄存器(USART_GTPR) 下图是USART通讯的示意图
下图是STM32串口异步通信需要定义的参数 STM32异步通信参数:
①起始位
②数据位(8位或者9位)
③奇偶校验位(第9位)
④停止位(1,15,2位)
⑤波特率设置
上图中红 {MOD}的线表示 芯片读取 PC端发送的信息,绿 {MOD}的线表示 发送数据到PC,枚红 {MOD}的线表示 时钟线。
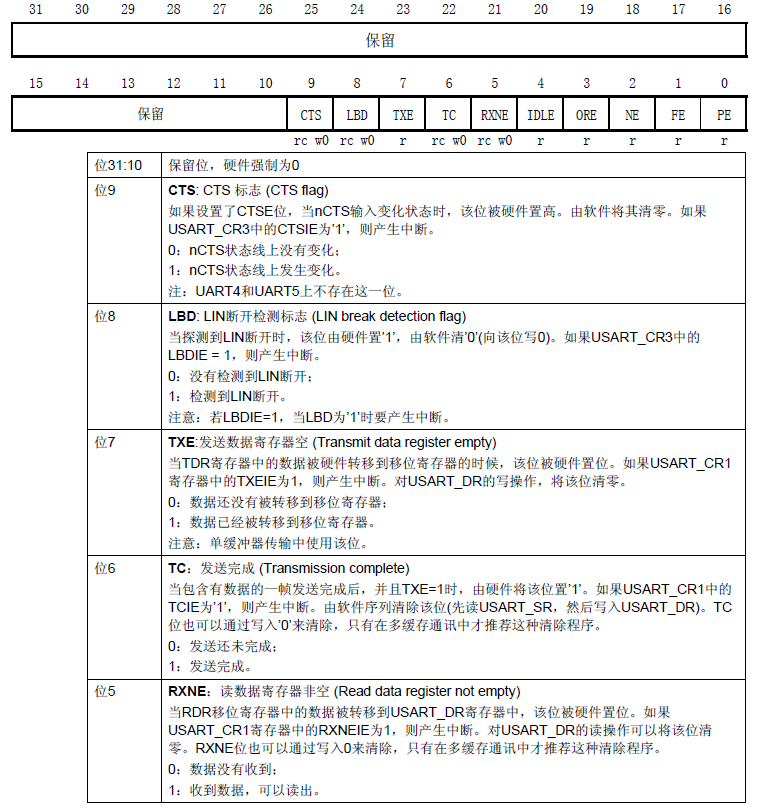
7)USART常用数据寄存器
USART_SR状态寄存器 USART_DR数据寄存器
USART_BRR波特率寄存器
波特率计算方法:

{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 weixin_40313361 的文章《单片机入门学习十 STM32单片机学习七 串口通讯》','https://www.xiaopingtou.net/article-63279.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
8)串口操作相关库函数
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);//串口初始化:波特率,数据字长,奇偶校验,硬件流控以及收发使能void USART_Cmd();//使能串口
void USART_ITConfig();//使能相关中断 void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);//发送数据到串口,DR
uint16_t uint16_t USART_ReceiveData(USART_TypeDef* USARTx);//接受数据,从DR读取接受到的数据 FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);//获取状态标志位 读取的是USART_SR寄存器
void USART_ClearFlag();//清除状态标志位
ITStatus USART_GetITStatus();//获取中断状态标志位
void USART_ClearITPendingBit();//清除中断状态标志位
9)串口配置一般步骤
①串口时钟使能,GPIO时钟使能:RCC_APB2PeriphClockCmd();②串口复位:USART_DeInit(); 这一步不是必须的
③GPIO端口模式设置:GPIO_Init(); 模式设置为GPIO_Mode_AF_PP(RX),GPIO_Mode_AF_Float(TX)
④串口参数初始化:USART_Init();
⑤开启中断并且初始化NVIC(如果需要开启中断才需要这个步骤)
NVIC_Init();
USART_ITConfig();
⑥使能串口:USART_Cmd();
⑦编写中断处理函数:USARTx_IRQHandler();
⑧串口数据收发:
void USART_SendData();//发送数据到串口,DR
uint16_t USART_ReceiveData();//接受数据,从DR读取接受到的数据
⑨串口传输状态获取:
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
2、串口编程
下面是所学的串口实现课程的源码usart.c
//串口1中断服务程序
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
void uart_init(u32 bound)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE); //使能USART1,GPIOA时钟
//USART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA.9
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.9
//USART1_RX GPIOA.10初始化
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//PA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.10
//Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3 ;//抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
//USART 初始化设置
USART_InitStructure.USART_BaudRate = bound;//串口波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//开启串口接受中断
USART_Cmd(USART1, ENABLE); //使能串口1
}
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
Res =USART_ReceiveData(USART1); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
main.c
int main(void)
{
u16 t;
u16 len;
u16 times=0;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(115200); //串口初始化为115200
while(1)
{
if(USART_RX_STA&0x8000)
{
len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度
printf("
您发送的消息为:
");
for(t=0;t//向串口1发送数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
}
printf("
");//插入换行
USART_RX_STA=0;
}
else
{
times++;
if(times%5000==0)
{
printf("
战舰STM32开发板 串口实验
");
printf("正点原子@ALIENTEK
");
}
if(times%200==0)printf("请输入数据,以回车键结束
");
if(times%30==0)LED0=!LED0;//闪烁LED,提示系统正在运行.
delay_ms(10);
}
}
}