{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 想做李白 的文章《单片机实验报告-串口实验》','https://www.xiaopingtou.net/article-63421.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
一.实验目的
1. 掌握 51 单片机串口工作原理。
2. 掌握 51 单片机串口初始化编程。
3. 掌握 51 单片机串口的软硬件编程。
二.实验设备和器件
1.KEIL软件
2.PROTEUS仿真软件
3.伟福实验箱
三.实验内容
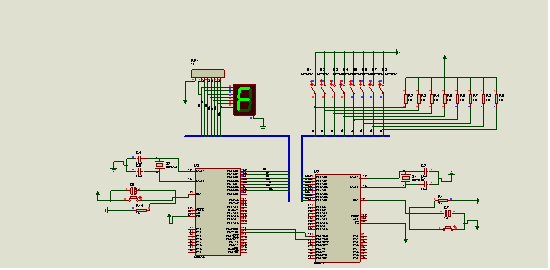
(1)编程实现:编程实现:甲、乙双机串行通信,双机的 RXD
和 TXD 相互交叉相连,甲机的 P0 口接 8 个开关,乙机的 P0口接 8 个发光二极管。甲机设置为只发不收的单工方式。要求甲机读入 P0口的 8 个开关的状态后,通过串行口发送到乙机,乙机将接收到的甲机的 8 个开关的状态数据送入 P0 口

#define uchar unsigned char
#define uint unsigned int
void main()
{uchar temp=0;
TMOD=0x20; /*设置定时器T1为方式2*/
TH1=0xfd; /*波特率9600*/
TL1=0xfd;
SCON=0x40; /*方式1只发送,不接收*/
PCON=0x00; /*波特率为9600,SMOD=0*/
TR1=1; /*启动T1*/
P0=0xff; /* P1口为输入*/
while(1)
{temp=P0; /*读入P0口开关的状态数据*/
SBUF=temp; /*数据送串行口发送*/
while(TI==0); /*如果TI=0,未发送完,循环等待*/
TI=0;}}/*已发送完,再把TI清0*/
/*乙机(接灯)代码*/
#include
#define uchar unsigned char
#define uint unsigned int
void main()
{uchar temp=0;
TMOD=0x20; /*设置定时器T1为方式2*/
TH1=0xfd; /*波特率9600*/
TL1=0xfd;
SCON=0x50; /*方式1接收REN=1*/
PCON=0x00; /*波特率为9600,SMOD=0*/
TR1=1; /*启动T1*/
P0=0xff; /* P0口为输入*/
while(1)
{while(RI==0); /* 若RI为0,未接收到数据*/
RI=0; /* 接收到数据,则把RI清0*/
temp=SBUF; /* 读取数据存入temp中*/
P0=temp; /* 接收的数据送P0口控制8个LED的亮与灭*/
}}
#define uchar unsigned char
#define uint unsigned int
void main()
{uchar temp=0;
TMOD=0x20; /*设置定时器T1为方式2*/
TH1=0xfd; /*波特率9600*/
TL1=0xfd;
SCON=0x40; /*方式1只发送,不接收*/
PCON=0x00; /*串行口初始化为方式0*/
TR1=1; /*启动T1*/
P0=0x0f; /* P0口为输入*/
while(1)
{temp=P0; /*读入P0口开关的状态数据*/
SBUF=temp; /*数据送串行口发送*/
while(TI==0); /*如果TI=0,未发送完,循环等待*/
TI=0;/*已发送完,再把TI清0*/
}}
/*乙机(接数码管)代码*/
#include
#include
#define uchar unsigned char
#define uint unsigned int
void delay(unsigned int time)
{int j = 150;
for(;time>0;time--)
for(;j>0;j--);}
void main( )
{Code uchar codevalue[16]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
uchar temp=0;
TMOD=0x20;
TH1=0xfd;
TL1=0xfd;
SCON = 0x50;
PCON = 0x00;
TR1=1;
while(1)
{while(RI==0);
RI=0;
temp=SBUF;
P0=codevalue[temp];
}}

#define uchar unsigned char
sbit RS=P1^7;/*数据命令选择端*/
sbit RW=P1^6;/*读/写选择端*/
sbit E=P1^5;/*使能端*/
void init(void);
void wc51r(uchar i);
void wc51ddr(uchar i);
void fbusy(void);
void main()
{SP=0x50;init();
wc51r(0x80);wc51ddr('1');wc51ddr('5');wc51ddr('0');wc51ddr('4');wc51ddr('0');
wc51ddr('1');wc51ddr('0');wc51ddr('1');wc51ddr('0');wc51ddr('7');
wc51r(0xc0);wc51ddr('j');wc51ddr('i');wc51ddr('a');wc51ddr('n');
wc51ddr('g');wc51ddr(' ');wc51ddr('z');wc51ddr('h');wc51ddr('e');wc51ddr('n');
while(1);}
/*初始化函数*/
void init()
{wc51r(0x01);//清屏命令
wc51r(0x38);//设置16*2,5*7点阵,8位数据接口
wc51r(0x0c);//显示控制开关命令:D=1,显示;c=0,光标不显示;B=0,字符不闪烁
wc51r(0x06);}//输入方式设置命令:字符不动,光标自动向右移动
/*检查忙函数*/
void fbusy()
{P2=0xff;RS=0;RW=1;//忙标志和地址计数器读出
E=0;E=1;
while (P2&0x80)
{E=0;E=1;}//忙,等待
}
/*写命令函数*/
void wc51r(uchar j)
{fbusy();
E=0;RS=0;RW=0;//指令寄存器写入
E=1;P2=j;E=0;}
/*写数据函数*/
void wc51ddr(uchar j)
{
fbusy();
E=0;RS=1;RW=0;//数据寄存器写入
E=1;P2=j;E=0;}
- 电路图:
- 代码:
- 分析:
- 串口工作于方式1或方式3已知波特率,计算初值的公式:
- REN为允许接收控制位,REN=1,则允许接收,REN=0,则禁止接收,允许发送,在该题中,最开始将乙机的SCON也设置为40H,及REN=0,此时不管开关怎么变换,灯都不会亮,原因是乙机现在无法接收串口数据
- 当开关闭合是,串口传送的数据为低电平数据,protuse仿真中,灯即为低电平亮,则不需要取反,eg:当第一个开关闭合时,传送的数据为01111111,则乙机收到数据后,第D0位为低电平,则第一盏灯亮
- 电路图:
- 代码:
- 分析:
- 数码管共阴极,发光二极管的正级接地,要接一个排阻,才可以正常使用;共阳极单片机可以直接驱动,发光二极管的正级接电源
- 在该题中数码管只能显示到F,乙机P0显示的值是codevalue[16]数组中的数,所以只需要4个开关控制,则甲机P0的初始值为0x0f,,初始值不能大于0f,如果大于,则超过了数组的范围,则数码管无法显示。
- (3)编写程序控制 LCD1602 输出显示数字和英文字符,显示内容为 2 行:第一行:学号;第二行:英文姓名(拼音)
- 电路图:
- 代码:
- 分析:
- sp其实是一个寄存器,其中只能保存一个指针,而这个指针就指向了栈空间中的最高层,即栈顶
- LCD第一行第一个字符地址为80H,第二行第一个字符地址为C0H
- E,使能端,为高电平时,读取液晶模块信息,当E端由高电平跳变成低电平时,液晶模块执行写操作