{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 北漂的二极管 的文章《【单片机实验】按键实验(一,二,三)》','https://www.xiaopingtou.net/article-63689.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
按键实验:
目的:通过按键控制其他元器件
实验一
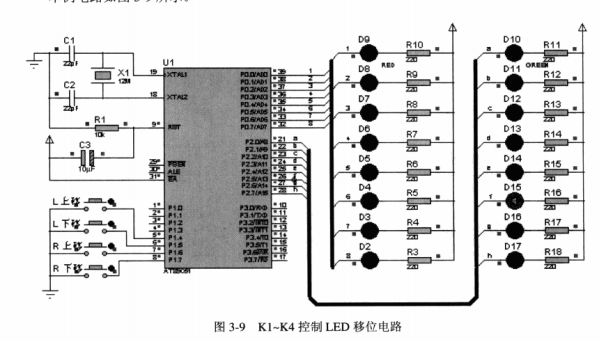
K1~K4控制LED移位
K1~K4按键状态显示:
LED1,2和3,4,控制灯的亮灭不同。
按下K1或K2时,LED1或2亮,松开熄灭。按下K3或K4后释放时,LED3或4 亮,再次按下并释放时熄灭。

—while(1)和while(1);(有分号)—
按键的高低电平
实验内容:在得出键号后分别对LED执行4种不同的操作。
移位:>> 右移;<<左移
认真做了按键实验,感觉单片机并不简单,需要自己好好努力,认真对待才行,各位大朋友,小朋友加油!(PS:markdown用的还有点无力,下次加油吧)
目的:通过按键控制其他元器件
实验一
K1~K4控制LED移位
目的:按下独立按键K1~K4,可分别上下控制连接在P0,P2端口的LED移位显示。
#include//使用芯片的库函数
#include/*intrins.h,函数,C51单片机编程中,使用到空指令_nop_();字符循环移位指令_crol_等时使用。*/
#define uint unsigned int//define宏定义
#define uchar unsigned char
void DelayMS(uint x)//延时函数,不同的芯片由于频率不同而不同
{
uchar i;
while (x--)
for (i = 0;i < 120;i++);
}
void Move_LED()//LED灯移动功能
//P1,按键引脚;P0:左流水灯;P2:右流水灯;
{
if ((P1 & 0x10) == 0) P0 = _crol_(P0, 1);
//左边流水灯向上移动
else if ((P1 & 0x20) == 0) P0 = _cror_(P0, 1);
//左边流水灯向下移动
else if ((P1 & 0x40) == 0) P2 = _crol_(P2, 1);
//右边流水灯向上移动
else if ((P1 & 0x80) == 0) P2 = _cror_(P2, 1);
//右边流水灯向下移动
}
实验二 K1~K4按键状态显示:
LED1,2和3,4,控制灯的亮灭不同。
按下K1或K2时,LED1或2亮,松开熄灭。按下K3或K4后释放时,LED3或4 亮,再次按下并释放时熄灭。
#include
重点 —while(1)和while(1);(有分号)—
while(1){……}:是让单片机一直执行{……}中内容,**防止程序跑飞**,通常用于主程序主体,确保程序持续执行
while(1); :是一条指令,它让单片机停在这个位置,一般用来检测中断,只有cpu收到中断指令,才会跳出while(1),进入中断服务子程序;
whlie(1)本质是死循环,while(1)中的指令会不断重复执行,除非有中断,while(1);可以看作while(1){//空指令},它执行的是空指令,
*于是单片机就停在这行代码处*
—按键的高低电平— 按键的高低电平
很明显:我们是高电平有效,未按下时,是高电平,为1;当K1=1时,灯是灭的;从P0,P1的引脚初始化也可以看出。
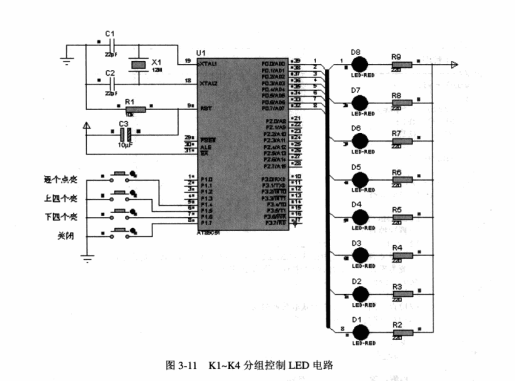
实验三
K1~K4分组控制LED 实验内容:在得出键号后分别对LED执行4种不同的操作。
#include
重点
—引脚和值的对应关系(反序)—
P0口的8个引脚被赋值成1111,1110,就是说只有P0^0口是低电平,其余都是高电平!8个引脚与0xfe的2进制分别对应!
即是1111,1110的值对应P0的7,6,5,4,3,2,1,0号引脚,不同于我们数数时01234567从左到右的逻辑,这种现象在汇编语言和单片机里很常见
—循环移位和移位(CF的作用有无)—
循环移位:单片机中的移位运算不同于C语言中的移位之后补零,而是分情况进行大循环和小循环(即是微机原理中的不带进位CF的CRL和带进位CF的ROR 循环移位)常使用_crol_()和_cror_()函数完成。
“` 移位:>> 右移;<<左移
本实验则是【未使用】循环移位。故在switch语句中进行
case 1:if (P0 == 0x00) P0 = 0xFF;
//若灯亮全灭
P0 <<= 1;
//(原来是ff 1111 1111 变 1111 1110,亮一个-》亮两个,3个,四个……八个,循环,全灭,也是逐个,从下到上移动。
—共阳极和共阴极(灯该怎么亮?)—
灯亮取决于高电平还是低电平,由共阳极和共阴极决定。
共阳极:低电平0亮,(和电源形成电平差,点亮LED灯)
共阴极:高电平1亮。
后语 认真做了按键实验,感觉单片机并不简单,需要自己好好努力,认真对待才行,各位大朋友,小朋友加油!(PS:markdown用的还有点无力,下次加油吧)