{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 忧乐游子 的文章《基于NXP S32V234的ADAS辅助驾驶硬件计算平台》','https://www.xiaopingtou.net/article-63971.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
- 主芯片型号:S32V234
- 计算性能:9200DMIPS(ARM每秒运算92亿条指令集)
- 主要应用场景:视觉处理、激光雷达点云处理、组合定位、决策规划、车辆控制等
- 参数指标(简略版):
4核Arm®Cortex®-M4 120MHz 3D GPU(Vivante GC3000) 存储 ROM 8GB,eMMC RAM 2GB,DDR3L SD卡 支持>8GB 传感器接口 LVDS 4路LVDS,FAKRA接口,支持720P 30fps 的视觉数据 ETH 4路1000BASE-TX,标准RJ45接口,支持1000Mbps 其它接口 CAN 2路CAN USB2.0 1个 USB3.0 1个 参考: 1.[原创] NXP S32V234视频处理器开发方案 2.世平集团联合驰晶科技推出基于 NXP S32V234 的Full-HD 3D 360° 车载全景环视与 ADAS 系统解决方案 3.S32V是NXP推出的汽车视觉微处理器具有强大的运算处理能力 4.河北优控-自动驾驶域控制器
S32V是NXP推出的汽车视觉微处理器具有强大的运算处理能力
360环视系统,是一套利用多个广角摄像头并通过车载显示屏幕显示汽车四周360度全景融合鸟瞰图像的泊车辅助系统,也叫全景倒车影像系统,全景泊车系统等。 它可以帮助汽车驾驶员了解车辆周边视线盲区,从而更为直观、更为安全地停泊车辆。整个系统的组成主要包括多个广角摄像头(多为4个),摄像头解码芯片,主处理器,电源管理芯片,液晶屏等。 其基本工作原理是主处理器通过摄像头解码芯片采集4个广角摄像头的原始数据,通过内部的算法将4个摄像头数据无缝融合成一幅鸟瞰图,显示到液晶屏上。 ZLG提供完整的360环视解决方案,包括基于LVDS和基于以太网的方案,两者仅在摄像头的数据传输方式上有所差别。 一.基于LVDS传输的360环视方案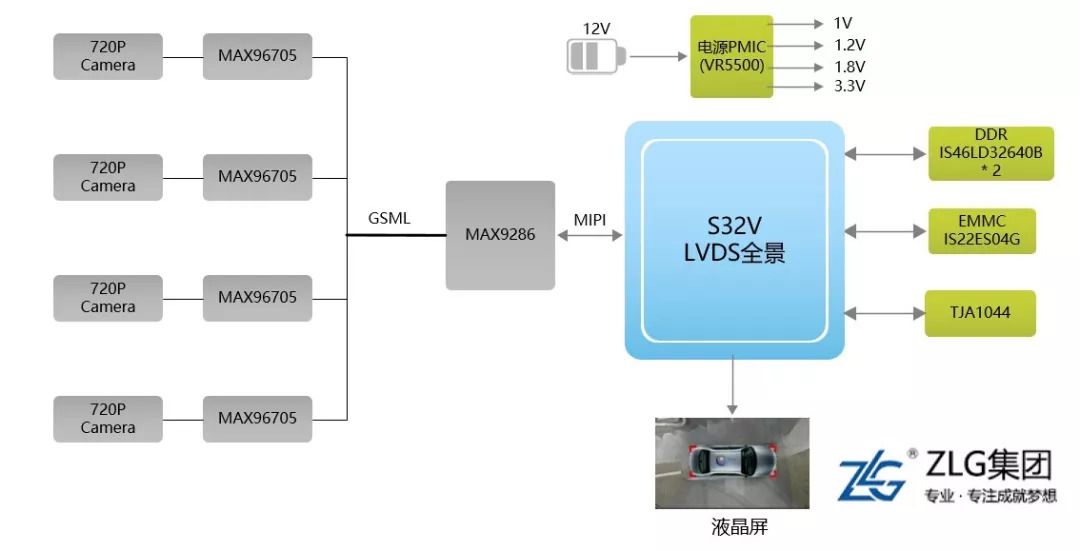 图1 基于LVDS的360环视方案框图
方案简介:摄像头端利用MAX96705将摄像头数据串行发出,而MAX9286解串器可通过长达15米的屏蔽双绞线(STP)或同轴电缆接收并同步来自4个摄像头的视频信号,通过MIPI CSI-2将数据传入S32V,S32V将图像数据进行融合拼接,再显示在液晶屏上。
二.基于以太网传输的360环视方案
图1 基于LVDS的360环视方案框图
方案简介:摄像头端利用MAX96705将摄像头数据串行发出,而MAX9286解串器可通过长达15米的屏蔽双绞线(STP)或同轴电缆接收并同步来自4个摄像头的视频信号,通过MIPI CSI-2将数据传入S32V,S32V将图像数据进行融合拼接,再显示在液晶屏上。
二.基于以太网传输的360环视方案
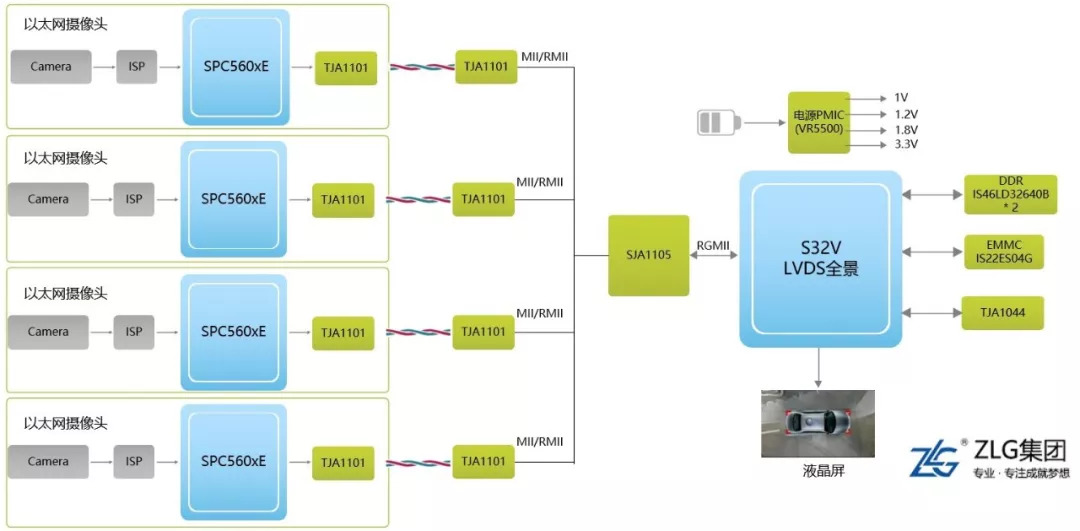 图2 基于以太网的360环视方案框图
方案简介:摄像头端SPC560xE将摄像头数据采集并编码,随后通过以太网将数据发送到网关SJA1105,网关将4路摄像头数据转发至S32V,S32V解析图像数据并对数据进行融合拼接并显示。
三.主处理器平台S32V介绍
S32V芯片框图如下:
图2 基于以太网的360环视方案框图
方案简介:摄像头端SPC560xE将摄像头数据采集并编码,随后通过以太网将数据发送到网关SJA1105,网关将4路摄像头数据转发至S32V,S32V解析图像数据并对数据进行融合拼接并显示。
三.主处理器平台S32V介绍
S32V芯片框图如下:
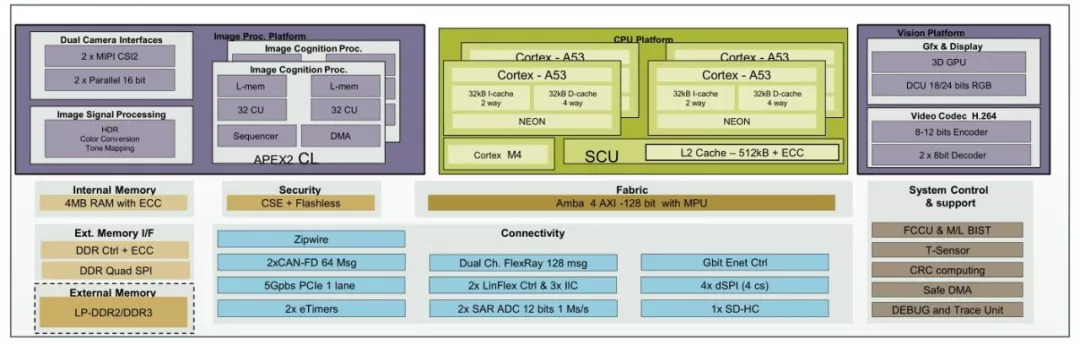 图3 S32V芯片框图
S32V是NXP推出的一款汽车视觉微处理器,多达4 x A53@1GHz和1 x M4@133MHz内核,具有强大的运算处理能力。S32V包含2个APEX核,可以轻松实现图像视频的检测,识别,分类等应用。S32V内部具有ISP,用户可以根据自己的应用在ISP跑相应的算法,从而可以使得摄像头数据更清晰,融合效果与显示效果更好。此外,S32V还包含一颗强大的3D GPU——GC3000,可轻松的将多路图像数据进行融合拼接,完美实现360环视效果。
下图给出了Vivante公司的一些主流GPU的性能参数:
图3 S32V芯片框图
S32V是NXP推出的一款汽车视觉微处理器,多达4 x A53@1GHz和1 x M4@133MHz内核,具有强大的运算处理能力。S32V包含2个APEX核,可以轻松实现图像视频的检测,识别,分类等应用。S32V内部具有ISP,用户可以根据自己的应用在ISP跑相应的算法,从而可以使得摄像头数据更清晰,融合效果与显示效果更好。此外,S32V还包含一颗强大的3D GPU——GC3000,可轻松的将多路图像数据进行融合拼接,完美实现360环视效果。
下图给出了Vivante公司的一些主流GPU的性能参数:
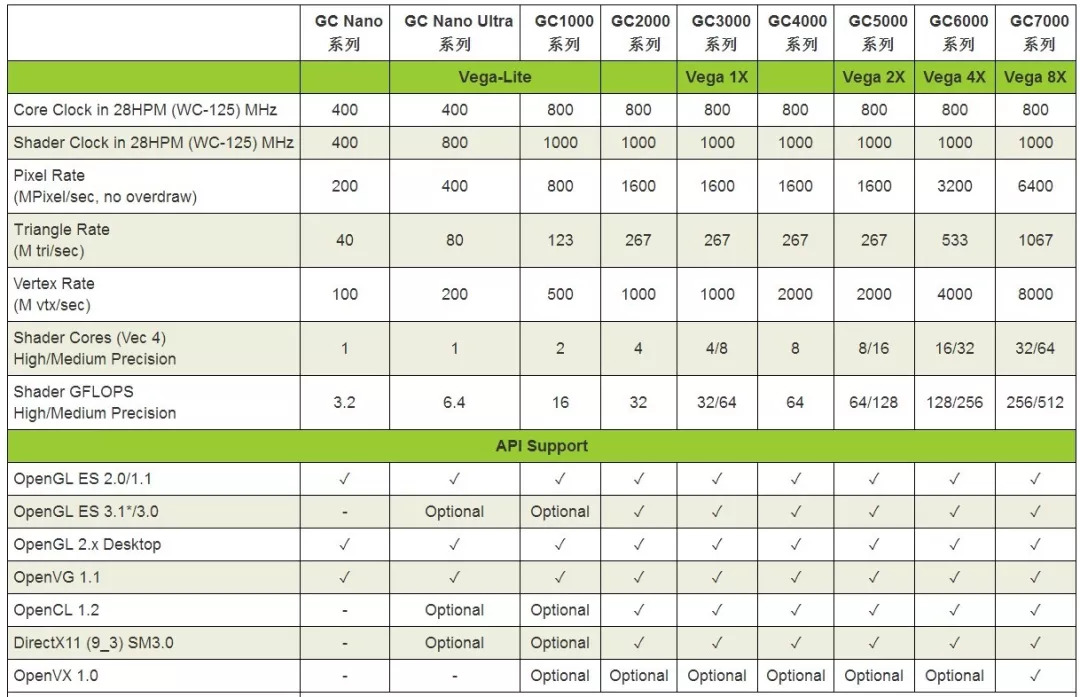 图4 Vivante主流GPU参数
四、丰富的开发资源
我们可提供S32V的核心板以及底板供您调试开发,同时也提供丰富的硬件设计资料,软件例程资料。让您在最短时间上手S32V平台!
图4 Vivante主流GPU参数
四、丰富的开发资源
我们可提供S32V的核心板以及底板供您调试开发,同时也提供丰富的硬件设计资料,软件例程资料。让您在最短时间上手S32V平台!
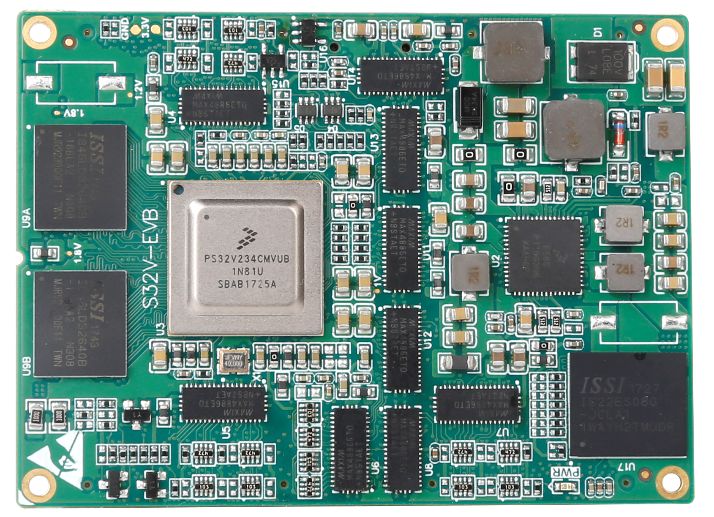 图5 S32V核心板图片
图5 S32V核心板图片
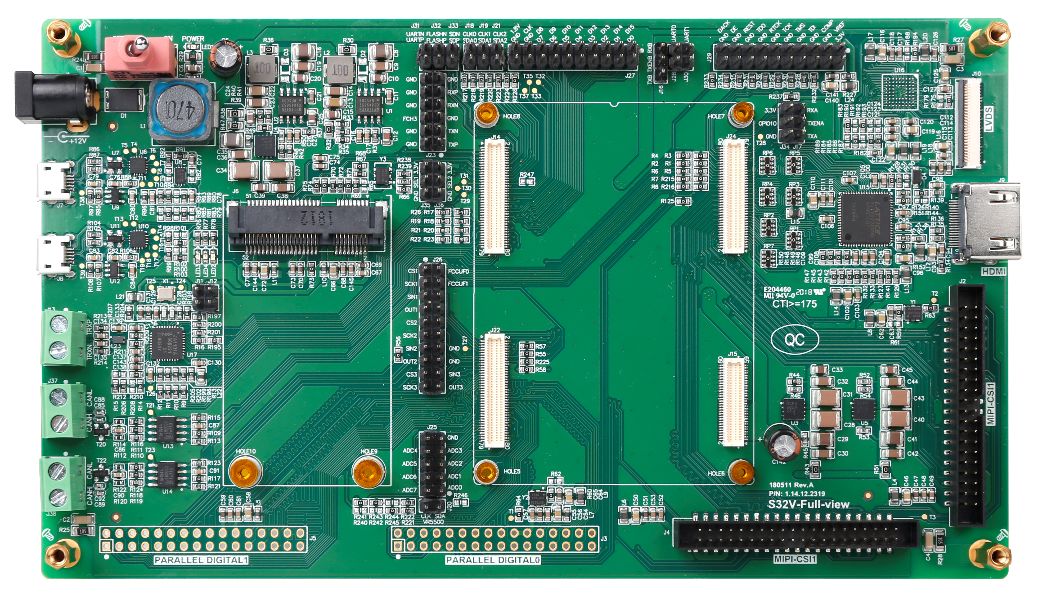 图6 S32V底板图片
目前360环视产品已经普及,下一代的360环视系统将会做的更清晰,效果也将逐渐由2D发展成3D,同时功能上可能会增加一些图像识别功能。
转自:http://www.elecfans.com/d/777452.html
图6 S32V底板图片
目前360环视产品已经普及,下一代的360环视系统将会做的更清晰,效果也将逐渐由2D发展成3D,同时功能上可能会增加一些图像识别功能。
转自:http://www.elecfans.com/d/777452.html