{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 mwc838222462 的文章《SPI协议》','https://www.xiaopingtou.net/article-64914.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
参考:https://en.wikipedia.org/wiki/Serial_Peripheral_Interface_Bus
SPI(Serial Peripheral Interface)是一种用于短距离的同步串行通信协议,由Motorola开发。
SPI通常需要4根总线,即SCK、MOSI、MISO、SS。
SCK是时钟信号,由主机输出,MOSI即Master Output Slave Input、MISO即Master Input Slave Output,用于数据的传输,而SS是Slave Select,是设备的片选信号,低有效,也为一个主机接多个从设备成为可能。
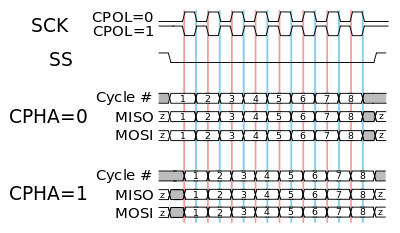
Clock的极性和相位。
1. 极性(CPOL)
CPOL=0,表示Clock空闲时电平是低电平,高电平时Clock有效。
CPOL=1,表示Clock空闲时电平是高电平,低电平时Clock有效。
2. 相位(CPHA)
SPI数据采样都是边沿采样,即上升沿或下降沿,所以这里的CPHA表示是第一个边沿采样还是第二个边沿采样。
CPOL=0、CPHA=0表示第一个边沿上升沿采样。
CPOL=0、CPHA=1表示第二个边沿下降沿采样。
CPOL=1、CPHA=0表示第一个边沿下降沿采样。
CPOL=1、CPHA=1表示第二个边沿上升沿采样。
SPI极性、相位时序图如下:
根据极性和相位共有4中组合,也就是SPI的工作模式。
Mode 0 CPOL=0 CPHA=0
Mode 1 CPOL=0 CPHA=1
Mode 2 CPOL=1 CPHA=0
Mode 3 CPOL=1 CPHA=1
例程:
// 2017-09-04 add
通常SPI的接口的屏会说到3线SPI、4线SPI,那么有什么区别呢?
这个要根据IC的数据手册来看了,通常3线SPI包括SCLK、SDIN、CS,如果是4线SPI的话,多一个DC引脚,这个引脚用来控制发送的是数据还是命令。
SPI(Serial Peripheral Interface)是一种用于短距离的同步串行通信协议,由Motorola开发。
SPI通常需要4根总线,即SCK、MOSI、MISO、SS。
SCK是时钟信号,由主机输出,MOSI即Master Output Slave Input、MISO即Master Input Slave Output,用于数据的传输,而SS是Slave Select,是设备的片选信号,低有效,也为一个主机接多个从设备成为可能。
Clock的极性和相位。
1. 极性(CPOL)
CPOL=0,表示Clock空闲时电平是低电平,高电平时Clock有效。
CPOL=1,表示Clock空闲时电平是高电平,低电平时Clock有效。
2. 相位(CPHA)
SPI数据采样都是边沿采样,即上升沿或下降沿,所以这里的CPHA表示是第一个边沿采样还是第二个边沿采样。
CPOL=0、CPHA=0表示第一个边沿上升沿采样。
CPOL=0、CPHA=1表示第二个边沿下降沿采样。
CPOL=1、CPHA=0表示第一个边沿下降沿采样。
CPOL=1、CPHA=1表示第二个边沿上升沿采样。
SPI极性、相位时序图如下:
根据极性和相位共有4中组合,也就是SPI的工作模式。
Mode 0 CPOL=0 CPHA=0
Mode 1 CPOL=0 CPHA=1
Mode 2 CPOL=1 CPHA=0
Mode 3 CPOL=1 CPHA=1
例程:
/*
* Simultaneously transmit and receive a byte on the SPI.
*
* Polarity and phase are assumed to be both 0, i.e.:
* - input data is captured on rising edge of SCLK.
* - output data is propagated on falling edge of SCLK.
*
* Returns the received byte.
*/
uint8_t SPI_transfer_byte(uint8_t byte_out)
{
uint8_t byte_in = 0;
uint8_t bit;
for (bit = 0x80; bit; bit >>= 1) {
/* Shift-out a bit to the MOSI line */
write_MOSI((byte_out & bit) ? HIGH : LOW);
/* Delay for at least the peer's setup time */
delay(SPI_SCLK_LOW_TIME);
/* Pull the clock line high */
write_SCLK(HIGH);
/* Shift-in a bit from the MISO line */
if (read_MISO() == HIGH)
byte_in |= bit;
/* Delay for at least the peer's hold time */
delay(SPI_SCLK_HIGH_TIME);
/* Pull the clock line low */
write_SCLK(LOW);
}
return byte_in;
}
// 2017-09-04 add
通常SPI的接口的屏会说到3线SPI、4线SPI,那么有什么区别呢?
这个要根据IC的数据手册来看了,通常3线SPI包括SCLK、SDIN、CS,如果是4线SPI的话,多一个DC引脚,这个引脚用来控制发送的是数据还是命令。