{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 zhaoshuzhaoshu 的文章《TPMS方案 传感器 freescale篇》','https://www.xiaopingtou.net/article-64988.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
TPMS方案 传感器 freescale篇
硬件原理图

使用f87xx11系列芯片参考,此原理图为433.92m fsk调制 软件说明:
协议
调制方式:FSK
频率: 433.920 MHz
频偏: 20.0 kHz
编码: Manchester
曼彻斯特类型: 10=One, 01=Zero
传输速率: 9.6 kbps
负载字节位起始: msb
前导码长度: 12(可根据需求调整长度,减少功耗)
前导码数据:0x00
同步码长度:1-byte
同步码: 0x01
数据长度:8 调制脉冲:
 状态机转换图:
状态机转换图:
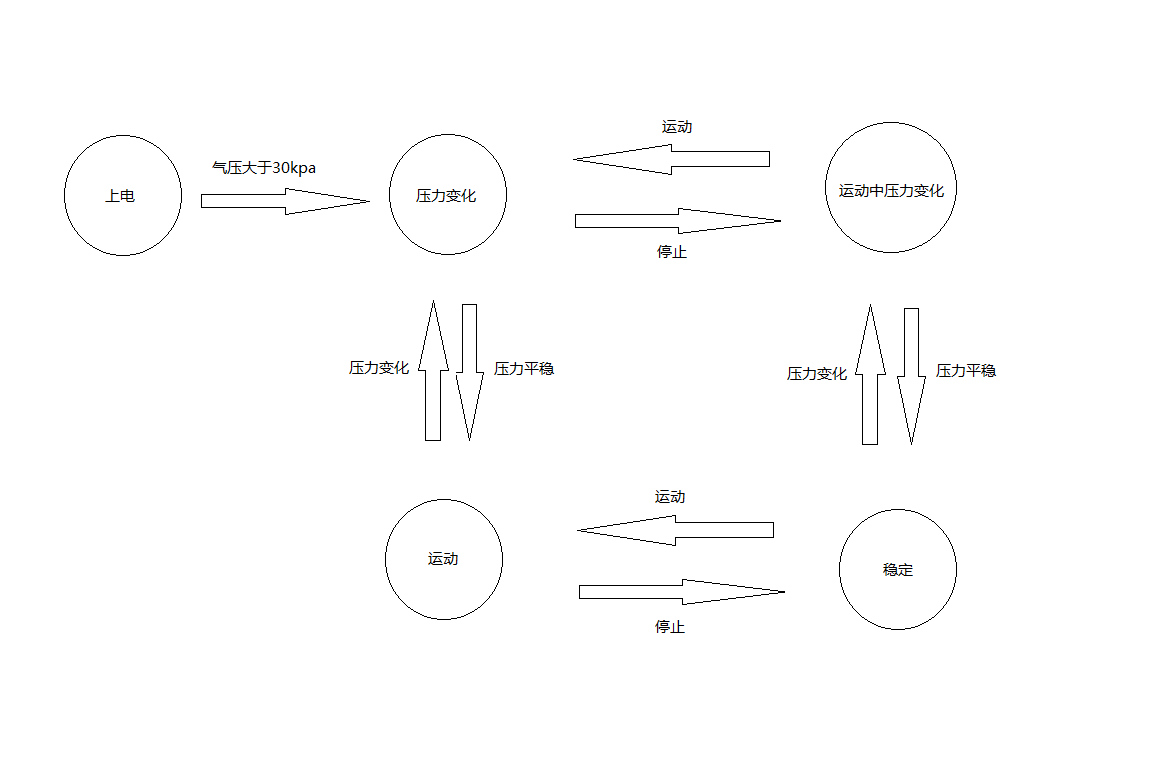 状态机转换代码
状态机转换代码
数据包含前导码,同步码,和数据部分
前导码功能唤醒接收端接收数据:此部分可根据客户需求调整长度
同步码可自定义
数据部分用于将胎压信息传输给接收端用来显示报警 调制方式:
采用的fsk调制方式发送数据,频率为433.92M.
调整RF发射时首先确定中心频率在误差范围之内。
设定合理的频偏能让产品更稳定。
频偏设置越大信号带宽越大,对于晶振的要求不需要那么严格,反之设置越小带宽越小,带内干扰减少,信噪比提高,可以提高接收灵敏度。设置合理的频宽能够兼顾稳定和灵敏。
波特率:
波特率就是调制信号的频率,比如波特率是10000,实际上调制信号的频率就是5KHz,这里我们假设载波是100MHz。载波的周期是10ns,调制信号的周期是0.2ms。假如我们要发一个01信号,那么在0电平的时候信号频率就是100.005MHz,在0电平期间有0.2ms/10ns=2万个频率为100.005MHz 的周期信号,1电平的时候信号频率是99.995MHz,在1电平期间有0.2ms/10ns=2万个频率为99.995MHz 的周期信号。如果波特率是1000,那么在0电平的时候信号频率就是100.0005MHz,在0电平期间有0.2ms/10ns=20万个频率为100.005MHz 的周期信号,1电平的时候信号频率是99.9995MHz,在1电平期间有0.2ms/10ns=20万个频率为99.9995MHz 的周期信号。所以波特率越低,信号传输的时间越长。
传输过程中主要的误码率是在频谱切换的时候产生,波特率越低,频谱切换的越慢,单位时间的数据量越小,分辨率越高;而且波特率越低,信号带宽越窄,抗干扰杜越好。这些都可以提高接收灵敏度。 已实际应用于生产,完整方案文档正在整理持续更新。
对于此项目有兴趣可以邮件联系,可以提供调试源码寄整套方案探讨
技术沟通邮件:tpms_for_open@outlook.com
硬件原理图
使用f87xx11系列芯片参考,此原理图为433.92m fsk调制 软件说明:
协议
调制方式:FSK
频率: 433.920 MHz
频偏: 20.0 kHz
编码: Manchester
曼彻斯特类型: 10=One, 01=Zero
传输速率: 9.6 kbps
负载字节位起始: msb
前导码长度: 12(可根据需求调整长度,减少功耗)
前导码数据:0x00
同步码长度:1-byte
同步码: 0x01
数据长度:8 调制脉冲:
状态机转换图:
状态机转换代码
switch(guTPMSStatus)
{
case OFF:
vfnSetPWUSec(15);
if(gu16CompPressure>10) //激活
{
gu16PressureMax = gu16CompPressure;
gu16PressureMin = gu16CompPressure;
guTPMSStatus = PRESSURE_CHANGE; //压力改变
vfnSetPWUSec(1);
}
break;
case STANDBY: //稳定静止状态
vfnSetPWUSec(6);
Translate_State();
break;
case RUN: //运动状态
vfnSetPWUSec(5);
Translate_State();
guRunCnt++;
if(guRunCnt>5)
{
Measure_Voltage();
Get_Voltage_State();
Measure_Temperature();
vfnRfSendFrame(2);
guRunCnt = 0;
}
break;
case PRESSURE_CHANGE: //压力变化
vfnSetPWUSec(1);
Translate_State();
Measure_Voltage();
Get_Voltage_State();
Measure_Temperature();
vfnRfSendFrame();
break;
case RUN_AND_CHANGE:
vfnSetPWUSec(1);
Translate_State();
Measure_Voltage();
Get_Voltage_State();
Measure_Temperature();
vfnRfSendFrame();
break;
}
数据发送:数据包含前导码,同步码,和数据部分
前导码功能唤醒接收端接收数据:此部分可根据客户需求调整长度
同步码可自定义
数据部分用于将胎压信息传输给接收端用来显示报警 调制方式:
采用的fsk调制方式发送数据,频率为433.92M.
调整RF发射时首先确定中心频率在误差范围之内。
设定合理的频偏能让产品更稳定。
频偏设置越大信号带宽越大,对于晶振的要求不需要那么严格,反之设置越小带宽越小,带内干扰减少,信噪比提高,可以提高接收灵敏度。设置合理的频宽能够兼顾稳定和灵敏。
波特率:
波特率就是调制信号的频率,比如波特率是10000,实际上调制信号的频率就是5KHz,这里我们假设载波是100MHz。载波的周期是10ns,调制信号的周期是0.2ms。假如我们要发一个01信号,那么在0电平的时候信号频率就是100.005MHz,在0电平期间有0.2ms/10ns=2万个频率为100.005MHz 的周期信号,1电平的时候信号频率是99.995MHz,在1电平期间有0.2ms/10ns=2万个频率为99.995MHz 的周期信号。如果波特率是1000,那么在0电平的时候信号频率就是100.0005MHz,在0电平期间有0.2ms/10ns=20万个频率为100.005MHz 的周期信号,1电平的时候信号频率是99.9995MHz,在1电平期间有0.2ms/10ns=20万个频率为99.9995MHz 的周期信号。所以波特率越低,信号传输的时间越长。
传输过程中主要的误码率是在频谱切换的时候产生,波特率越低,频谱切换的越慢,单位时间的数据量越小,分辨率越高;而且波特率越低,信号带宽越窄,抗干扰杜越好。这些都可以提高接收灵敏度。 已实际应用于生产,完整方案文档正在整理持续更新。
对于此项目有兴趣可以邮件联系,可以提供调试源码寄整套方案探讨
技术沟通邮件:tpms_for_open@outlook.com