{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 simonprince 的文章《I.MX6 Android 平台CAN总线调试(包含测试C语言代码)》','https://www.xiaopingtou.net/article-65406.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
I.MX6 Android 平台CAN总线调试(包含测试C语言代码)
前言:这几天需要调试NXP Android平台CAN总线,以前到工作中都没有接触过can总线,折腾了几天,终于通信成功。至于can总线的原理我就不细说了,网上很多,原理很复杂,也比较难懂,我们主要还是学习如何使用就可以了。这里就记录以下在android平台下如何使用can进行通信。 一、外围电路CAN总线收发驱动电路。 二、在imx6q的的BSP中已经有了CAN总线的驱动,驱动的源代码在drivers
etcanflexcan.c,一般情况下已经打开了CAN功能,如果没打开的话进入kernel代码执行make menuconfig对内核进行配置,如下图,具体的设置就不细说。
二、在imx6q的的BSP中已经有了CAN总线的驱动,驱动的源代码在drivers
etcanflexcan.c,一般情况下已经打开了CAN功能,如果没打开的话进入kernel代码执行make menuconfig对内核进行配置,如下图,具体的设置就不细说。
 三、adb shell进入调试模式,使用iproute2工具到ip命令,查看和设置can参数,这个工具android已经集成有,直接使用。
三、adb shell进入调试模式,使用iproute2工具到ip命令,查看和设置can参数,这个工具android已经集成有,直接使用。ifconfig -a //确认是否有can0 和can1存在
ifconfig can0 down //关闭can0,以便配置
ip link set can0 up type can bitrate 500000 //设置can0波特率
ip link set can0 up // 启动can0
ip link set can0 down // 关闭can0
ip -details -statistics link show can0 //查看统一参数
ip -details link show can0 //查看统一参数

 四、PC端用工具跟ARM开发板进行can通信。
4.1、arm开发板can总线收发can数据测试c语言代码。
四、PC端用工具跟ARM开发板进行can通信。
4.1、arm开发板can总线收发can数据测试c语言代码。
/*
* can_test_send_and_dump.c
*
* Created on: 2018-8-25
* Author: tanghanyue
*/
#include
#include
#include
#include
#include
#include
#include
#include
#include
int main(int argc, char *argv[])
{
int s, nbytes;
unsigned char number=0;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
struct can_frame frame_send;
struct can_filter rfilter[1];
pid_t pid = -1;
int i;
/* handle (optional) flags first */
if(argc != 2) {
fprintf(stderr, "Usage: %s <-r> for receiving
or <-s> for sending
", argv[0]);
exit(1);
}
/* create socket */
if ((s = socket(PF_CAN, SOCK_RAW, CAN_RAW)) < 0)
{
perror("Create socket failed");
exit(-1);
}
/* set up can interface */
strcpy(ifr.ifr_name, argv[1]);
printf("can port is %s
",ifr.ifr_name);
/* assign can device */
ioctl(s, SIOCGIFINDEX, &ifr);
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
/* bind can device */
if(bind(s, (struct sockaddr *)&addr, sizeof(addr)) < 0)
{
perror("Bind can device failed
");
close(s);
exit(-2);
}
pid = fork();
if(pid == -1)
{
perror("
failed to fork!!
");
return -1;
}
else if(pid==0)/* configure receiving can data*/
{
/* set filter for only receiving packet with can id 0x88 */
rfilter[0].can_id = 0x88;
rfilter[0].can_mask = CAN_SFF_MASK;
if(setsockopt(s, SOL_CAN_RAW, CAN_RAW_FILTER, &rfilter, sizeof(rfilter)) < 0)
{
perror("set receiving filter error
");
close(s);
exit(-3);
}
/* keep reading */
while(1){
nbytes = read(s, &frame, sizeof(frame));
if(nbytes > 0)
{
printf("read datas:%s ID=%#x data length=%d
", ifr.ifr_name, frame.can_id, frame.can_dlc);
for ( i=0; i < frame.can_dlc; i++)
printf("%#x ", frame.data[i]);
printf("
");
}
printf("read can data over
");
}
}/* configure sending can data*/
else
{
while(1)
{
/* configure can_id and can data length */
frame_send.can_id = 0x88;
frame_send.can_dlc = 8;
printf("%s ID=%#x data length=%d
", ifr.ifr_name, frame_send.can_id, frame_send.can_dlc);
/* prepare data for sending: 0x11,0x22...0x88 */
for (i=0; i<8; i++)
{
frame_send.data[i] = ((i+1)<<4) | (i+1);
frame_send.data[7] =number;
printf("%#x ", frame_send.data[i]);
}
printf("success to Sent out
");
/* Sending data */
if(write(s, &frame_send, sizeof(frame_send)) < 0)
{
perror("Send failed");
close(s);
exit(-4);
}
sleep(1);
number++;
}
}
close(s);
return 0;
}
4.2、PC通过USB口连接到CAN分析仪,将arm开发板到can端口连接到can分析仪。
 4.3、PC端运行USB_CAN TOOL,安装对应的USB驱动。
4.3、PC端运行USB_CAN TOOL,安装对应的USB驱动。
 4.4、在ubuntu下用ARM交叉编译工具把c语言代码编译成可执行文件,然后adb push到android设备/system/bin/路径下,执行can_test_send_and_dump can0.
4.4、在ubuntu下用ARM交叉编译工具把c语言代码编译成可执行文件,然后adb push到android设备/system/bin/路径下,执行can_test_send_and_dump can0.
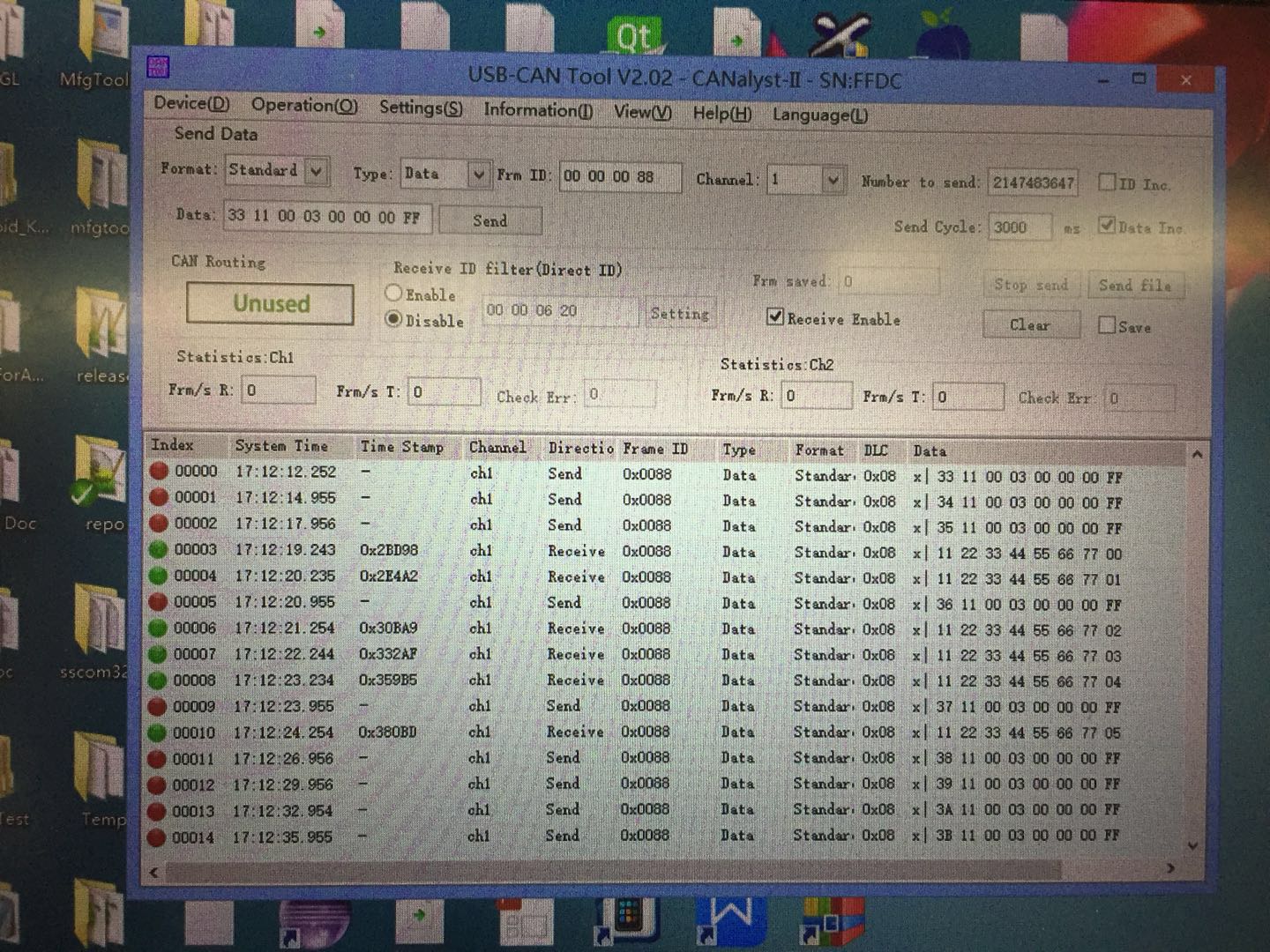
 4.5、USB_CAN TOOL打开can连接,可以看到收发can数据。
4.5、USB_CAN TOOL打开can连接,可以看到收发can数据。
 4.6、注意的一点是,测试程序只接收ID为0x88的CAN设备发送过来到can数据,在USB_CAN TOOL要设置ID为0x88,不然ARM板端接收不到数据。
4.6、注意的一点是,测试程序只接收ID为0x88的CAN设备发送过来到can数据,在USB_CAN TOOL要设置ID为0x88,不然ARM板端接收不到数据。
 4.7、PC机和arm板的can通信成功。
4.7、PC机和arm板的can通信成功。