{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 ppxxjh 的文章《[ZedBoard移植嵌入式Linux教程(6)]编译uboot(Second Stage Boot》','https://www.xiaopingtou.net/article-66828.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
我们使用Digilent公司提供的uboot作为Second Stage Boot Loader(SSBL)。SSBL用于加载压缩的linux内核镜像,设备树文件,根文件系统到内存中,并解压linux镜像,初始化并将CPU控制权交给linux内核。在前面提供的地址https://github.com/Digilent/u-boot-digilent下载uboot。如果是在windows中下载,请在下载完成之后拷贝到ubuntu中。以下操作都在ubuntu中进行。请提前安装好Ubuntu 12.04 LTS。我将下载的uboot压缩文件u-boot-digilent-master放在/home/dc/Desktop/zedboard/目录中  解压
解压 

解压完成后,进入目录我们修改默认的uboot配置文件,文件在目录include/configs/zynq_zed.h 我们可以配置Zedboard的ip地址,终端提示符,以及启动的zImage,devicetree,ramdisk的文件名等。
我们可以配置Zedboard的ip地址,终端提示符,以及启动的zImage,devicetree,ramdisk的文件名等。 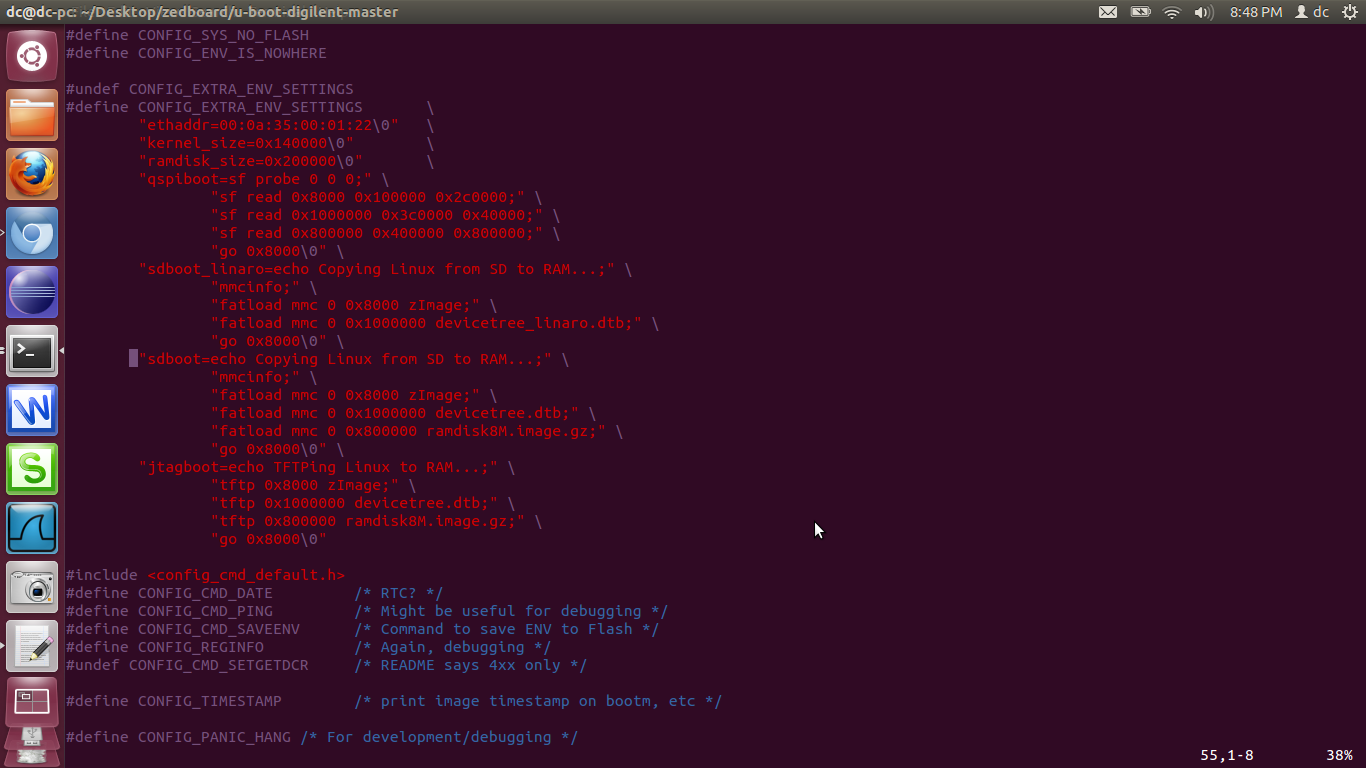
 不过默认也可以。接下来我们使用上一章安装好的交叉编译工具编译uboot。使用如下命令进行默认配置make ARCH=arm CROSS_COMPILE=arm-xilinx-linux-gnueabi- zynq_zed_config使用如下命令编译make ARCH=arm CROSS_COMPILE=arm-xilinx-linux-gnueabi-一定要指定目标平台和交叉编译器,以免出现不必要的错误。编译完后,使用mv命令将u-boot重命名为u-boot.elf
不过默认也可以。接下来我们使用上一章安装好的交叉编译工具编译uboot。使用如下命令进行默认配置make ARCH=arm CROSS_COMPILE=arm-xilinx-linux-gnueabi- zynq_zed_config使用如下命令编译make ARCH=arm CROSS_COMPILE=arm-xilinx-linux-gnueabi-一定要指定目标平台和交叉编译器,以免出现不必要的错误。编译完后,使用mv命令将u-boot重命名为u-boot.elf  至此,uboot制作完成。
至此,uboot制作完成。
解压 解压完成后,进入目录我们修改默认的uboot配置文件,文件在目录include/configs/zynq_zed.h
我们可以配置Zedboard的ip地址,终端提示符,以及启动的zImage,devicetree,ramdisk的文件名等。 不过默认也可以。接下来我们使用上一章安装好的交叉编译工具编译uboot。使用如下命令进行默认配置make ARCH=arm CROSS_COMPILE=arm-xilinx-linux-gnueabi- zynq_zed_config使用如下命令编译make ARCH=arm CROSS_COMPILE=arm-xilinx-linux-gnueabi-一定要指定目标平台和交叉编译器,以免出现不必要的错误。编译完后,使用mv命令将u-boot重命名为u-boot.elf 至此,uboot制作完成。