{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 xjj157 的文章《将驱动编译成.ko文件添加到嵌入式Linux系统下》','https://www.xiaopingtou.net/article-68155.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
为减少内核所占的空间,很多时候我们在编译内核时都会选择裁去一些暂时不用的驱动,当我们在使用时找不到对应的驱动,除了重新编译内核外,一个比较方便的做法是将对应的驱动编译成.ko文件(模块),再添加到系统下。下面介绍两种编译.ko文件的方法,以nanoPi M3板子为例:编译平台:Ubuntu
一、直接使用源码编译首先获取源码的驱动程序,以给板子添加joydev的驱动为例,找到驱动源码joydev.c,将其放到一个新建文件夹下,编写相应Makefile文件,其中KERNEL_PATH是内核源码的目录。Makefile
设置交叉编译器:编辑文件 ~/.bashrc,将交叉编译器位置添加进来(或者编译时指定编译器)
执行命令更新文件(点号过来有个空格). ~/.bashrc执行命令查看编译器是否设置完成arm-linux-gcc -v
准备好后即可开始编译了,在该文件夹下执行make ARCH=arm编译完成后可以看到当前文件夹下出现了.ko文件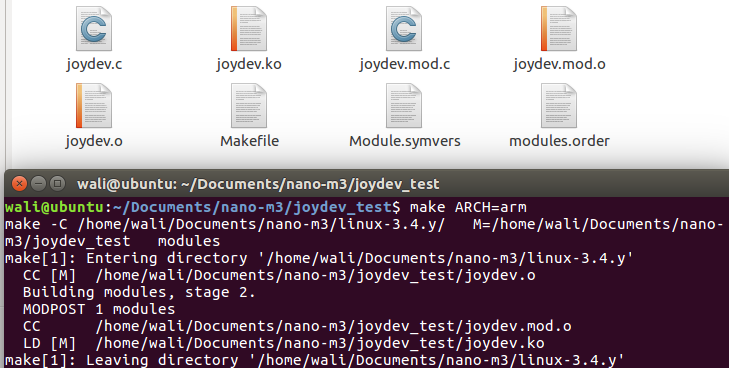
二、Kernel下编译内核模块首先进入Kernel目录,使用make menuconfig进入Kernel配置界面,找到joydev相关配置位置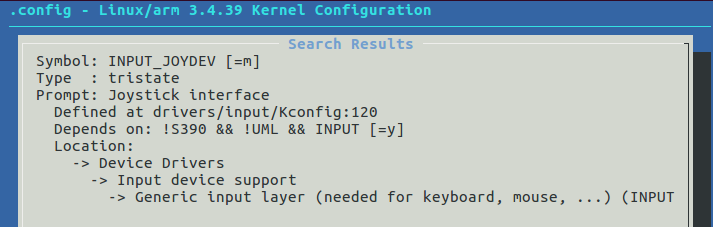
我们到上面指示的位置去,将Joystick interface勾选为模块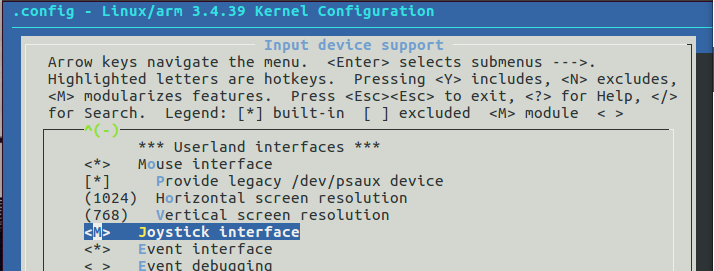
退出后在Kernel目录下新建一个名为modules_install的文件夹执行命令make modules
make INSTALL_MOD_PATH=./modules_install/ modules_install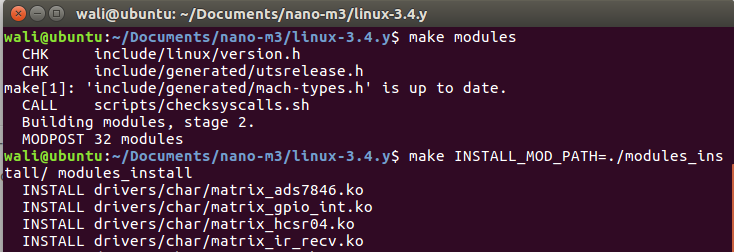
编译完成后可以在相应文件夹下看到joydev.ko文件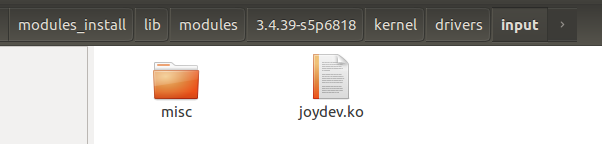
最后,我们只要将编译出来的.ko文件复制到板子中,在文件所在目录下使用sudo insmod *.ko (sudo insmod joydev.ko)或者将.ko文件放到 /lib/modules/#uname -r#/ 目录下,其中 uname -r 对应你的内核版本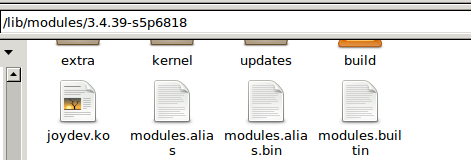
然后执行以下命令depmod就可以使用以下指令来加载了sudo modprobe -v 模块名称 (sudo modprobe -v joydev)将相关设备接入板子,就可以找到该设备。
卸载模块:如果是使用 insmod 安装的模块,使用以下指令卸载模块 sudo rmmode 模块名称 (sudo rmmod joydev)如果是使用 modprobe 安装的模块,使用以下指令卸载模块 sudo modprobe -r -v 模块名称 (sudo modprobe -r -v joydev)
一、直接使用源码编译首先获取源码的驱动程序,以给板子添加joydev的驱动为例,找到驱动源码joydev.c,将其放到一个新建文件夹下,编写相应Makefile文件,其中KERNEL_PATH是内核源码的目录。Makefile
obj-m := joydev.o
KERNEL_PATH := /home/wali/Documents/nano-m3/linux-3.4.y/
PWD := $(shell pwd)
all:
make -C $(KERNEL_PATH) M=$(PWD) modules
clean:
make -C $(KERNEL_PATH) M=$(PWD) clean 设置交叉编译器:编辑文件 ~/.bashrc,将交叉编译器位置添加进来(或者编译时指定编译器)
执行命令更新文件(点号过来有个空格). ~/.bashrc执行命令查看编译器是否设置完成arm-linux-gcc -v
准备好后即可开始编译了,在该文件夹下执行make ARCH=arm编译完成后可以看到当前文件夹下出现了.ko文件
二、Kernel下编译内核模块首先进入Kernel目录,使用make menuconfig进入Kernel配置界面,找到joydev相关配置位置
我们到上面指示的位置去,将Joystick interface勾选为模块
退出后在Kernel目录下新建一个名为modules_install的文件夹执行命令make modules
make INSTALL_MOD_PATH=./modules_install/ modules_install
编译完成后可以在相应文件夹下看到joydev.ko文件
最后,我们只要将编译出来的.ko文件复制到板子中,在文件所在目录下使用sudo insmod *.ko (sudo insmod joydev.ko)或者将.ko文件放到 /lib/modules/#uname -r#/ 目录下,其中 uname -r 对应你的内核版本
然后执行以下命令depmod就可以使用以下指令来加载了sudo modprobe -v 模块名称 (sudo modprobe -v joydev)将相关设备接入板子,就可以找到该设备。
卸载模块:如果是使用 insmod 安装的模块,使用以下指令卸载模块 sudo rmmode 模块名称 (sudo rmmod joydev)如果是使用 modprobe 安装的模块,使用以下指令卸载模块 sudo modprobe -r -v 模块名称 (sudo modprobe -r -v joydev)