{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 yanchao7788 的文章《MRPT学习(一)——ubuntu for ROS MRPT安装》','https://www.xiaopingtou.net/article-71289.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
MRPT(Mobile Robot Programming Toolkit,移动机器人编程工具箱)的安装。
1、准备编译环境:
 注:如出现如下这种红 {MOD}的,则在点击configure之后,再点击一次configure,完成后点击generate。
注:如出现如下这种红 {MOD}的,则在点击configure之后,再点击一次configure,完成后点击generate。
 5、进入build文件夹下并开始编译。
5、进入build文件夹下并开始编译。
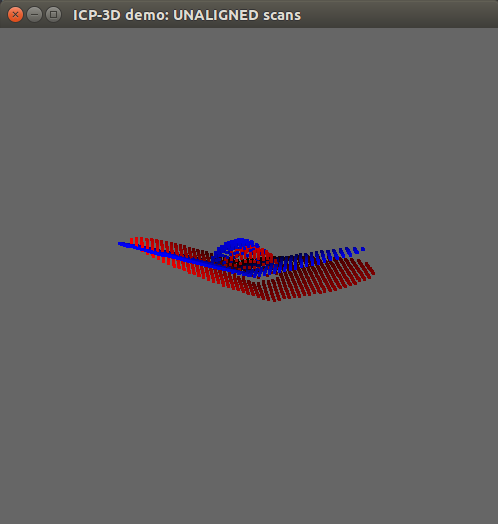
 6、测试。
6、测试。


sudo apt-get install build-essential pkg-config cmake
libwxgtk2.8-dev libftdi-dev freeglut3-dev
zlib1g-dev libusb-1.0-0-dev libudev-dev libfreenect-dev
libdc1394-22-dev libavformat-dev libswscale-dev
libassimp-dev libjpeg-dev libopencv-dev libgtest-dev
libeigen3-dev libsuitesparse-dev libpcap-dev
2、运行如下命令安装cmake-gui:
sudo apt-get install cmake3-qt-gui
3、下载MRPT源码,解压后放到ubuntu中,进入MRPT源码文件夹下,创建build目录:
cd mrpt1.5.5
mkdir build
4、使用cmake-gui生成配置文件,其中设置"source dir" 为下载的MRPT 源码路径。设置"binary directory"为MRPT源码目录下的build目录,用于存放生成的工程文件。点"configure",完成后点击"Generate"。
sudo cmake-gui
注:如出现如下这种红 {MOD}的,则在点击configure之后,再点击一次configure,完成后点击generate。
5、进入build文件夹下并开始编译。
cd build
sudo make -j4
6、测试。
cd ..
cd samples
cd icp3D
cmake .
make
./icp3D
即可看到下列运行结果: