{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 lilongbin 的文章《Linux CAN编程详解》','https://www.xiaopingtou.net/article-71462.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
转发自:http://velep.com/archives/1181.html
《Linux CAN编程详解》是一篇百度文库上的文档,主要描述了以下内容:
ifconfig –a 可以得到以下结果: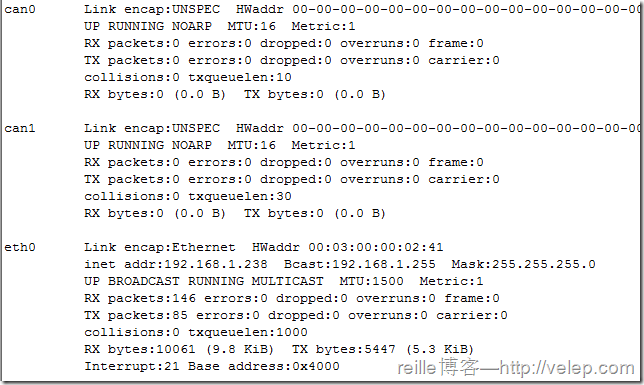 在上面的结果中, eth0 设备为以太网接口, can0和can1 设备为两个 CAN 总线接口。接下来使用 ip 命令来配置 CAN 总线的位速率:
ip link set can0 type cantq 125 prop-seg 6phase-seg1 7 phase-seg2 2 sjw 1
也可以使用 ip 命令直接设定位速率:
ip link set can0 type can bitrate 125000
当设置完成后,可以通过下面的命令查询 can0 设备的参数设置:
ip -details link show can0
当设置完成后,可以使用下面的命令使能 can0 设备:
ifconfig can0 up
使用下面的命令取消 can0 设备使能:
ifconfig can0 down
在设备工作中,可以使用下面的命令来查询工作状态:
ip -details -statistics link show can0
Linux 系统中CAN 接口应用程序开发
由于系统将 CAN 设备作为网络设备进行管理,因此在 CAN 总线应用开发方面, Linux 提供了SocketCAN 接口,使得 CAN 总线通信近似于和以太网的通信,应用程序开发接口 更加通用, 也更加灵活。
此外,通过 https://gitorious.org/linux-can/can-utils 网站发布的基于 SocketCAN 的 can-utils 工具套件, 也可以实现简易的 CAN 总线通信。
下面具体介绍使用 SocketCAN 实现通信时使用的应用程序开发接口。
(1). 初始化
SocketCAN 中大部分的数据结构和函数在头文件 linux/can.h 中进行了定义。 CAN 总线套接字的创建采用标准的网络套接字操作来完成。网络套接字在头文件 sys/socket.h 中定义。 套接字的初始化方法如下:
在上面的结果中, eth0 设备为以太网接口, can0和can1 设备为两个 CAN 总线接口。接下来使用 ip 命令来配置 CAN 总线的位速率:
ip link set can0 type cantq 125 prop-seg 6phase-seg1 7 phase-seg2 2 sjw 1
也可以使用 ip 命令直接设定位速率:
ip link set can0 type can bitrate 125000
当设置完成后,可以通过下面的命令查询 can0 设备的参数设置:
ip -details link show can0
当设置完成后,可以使用下面的命令使能 can0 设备:
ifconfig can0 up
使用下面的命令取消 can0 设备使能:
ifconfig can0 down
在设备工作中,可以使用下面的命令来查询工作状态:
ip -details -statistics link show can0
Linux 系统中CAN 接口应用程序开发
由于系统将 CAN 设备作为网络设备进行管理,因此在 CAN 总线应用开发方面, Linux 提供了SocketCAN 接口,使得 CAN 总线通信近似于和以太网的通信,应用程序开发接口 更加通用, 也更加灵活。
此外,通过 https://gitorious.org/linux-can/can-utils 网站发布的基于 SocketCAN 的 can-utils 工具套件, 也可以实现简易的 CAN 总线通信。
下面具体介绍使用 SocketCAN 实现通信时使用的应用程序开发接口。
(1). 初始化
SocketCAN 中大部分的数据结构和函数在头文件 linux/can.h 中进行了定义。 CAN 总线套接字的创建采用标准的网络套接字操作来完成。网络套接字在头文件 sys/socket.h 中定义。 套接字的初始化方法如下:
《Linux CAN编程详解》是一篇百度文库上的文档,主要描述了以下内容:
- can总线介绍及其帧类型;
- Linux 系统中CAN 接口配置;
- Linux 系统中CAN 接口应用程序开发;
- Linux 系统中CAN 接口编程实例
ifconfig –a 可以得到以下结果:
在上面的结果中, eth0 设备为以太网接口, can0和can1 设备为两个 CAN 总线接口。接下来使用 ip 命令来配置 CAN 总线的位速率:
ip link set can0 type cantq 125 prop-seg 6phase-seg1 7 phase-seg2 2 sjw 1
也可以使用 ip 命令直接设定位速率:
ip link set can0 type can bitrate 125000
当设置完成后,可以通过下面的命令查询 can0 设备的参数设置:
ip -details link show can0
当设置完成后,可以使用下面的命令使能 can0 设备:
ifconfig can0 up
使用下面的命令取消 can0 设备使能:
ifconfig can0 down
在设备工作中,可以使用下面的命令来查询工作状态:
ip -details -statistics link show can0
Linux 系统中CAN 接口应用程序开发
由于系统将 CAN 设备作为网络设备进行管理,因此在 CAN 总线应用开发方面, Linux 提供了SocketCAN 接口,使得 CAN 总线通信近似于和以太网的通信,应用程序开发接口 更加通用, 也更加灵活。
此外,通过 https://gitorious.org/linux-can/can-utils 网站发布的基于 SocketCAN 的 can-utils 工具套件, 也可以实现简易的 CAN 总线通信。
下面具体介绍使用 SocketCAN 实现通信时使用的应用程序开发接口。
(1). 初始化
SocketCAN 中大部分的数据结构和函数在头文件 linux/can.h 中进行了定义。 CAN 总线套接字的创建采用标准的网络套接字操作来完成。网络套接字在头文件 sys/socket.h 中定义。 套接字的初始化方法如下:
1
int s;
2
struct sockaddr_can
addr;
3
struct ifreq
ifr;
4
s
= socket(PF_CAN, SOCK_RAW, CAN_RAW);//创建
SocketCAN 套接字
5
strcpy(ifr.ifr_name, "can0" );
6
ioctl(s,
SIOCGIFINDEX, &ifr);//指定
can0 设备
7
addr.can_family
= AF_CAN;
8
addr.can_ifindex
= ifr.ifr_ifindex;
9
bind(s,
(struct sockaddr
*)&addr, sizeof(addr)); //将套接字与
can0 绑定
(2). 数据发送
在数据收发的内容方面, CAN 总线与标准套接字通信稍有不同,每一次通信都采用 can_ frame 结构体将数据封装成帧。 结构体定义如下:
1
struct can_frame
{
2
canid_t
can_id;//CAN
标识符
3
__u8
can_dlc;//数据场的长度
4
__u8
data[8];//数据
5
};
can_id 为帧的标识符, 如果发出的是标准帧, 就使用 can_id 的低 11 位; 如果为扩展帧, 就使用 0~ 28 位。 can_id 的第 29、 30、 31 位是帧的标志位,用来定义帧的类型,定义如下:
1
#define
CAN_EFF_FLAG 0x80000000U //扩展帧的标识
2
#define
CAN_RTR_FLAG 0x40000000U //远程帧的标识
3
#define
CAN_ERR_FLAG 0x20000000U //错误帧的标识,用于错误检查
数据发送使用 write 函数来实现。 如果发送的数据帧(标识符为 0x123)包含单个字节(0xAB)的数据,可采用如下方法进行发送:
1
struct can_frame
frame;
2
frame.can_id
= 0x123;//如果为扩展帧,那么
frame.can_id = CAN_EFF_FLAG | 0x123;
3
frame.can_dlc
= 1; //数据长度为
1
4
frame.data[0]
= 0xAB; //数据内容为
0xAB
5
int nbytes
= write(s, &frame, sizeof(frame)); //发送数据
6
if(nbytes
!= sizeof(frame)) //如果
nbytes 不等于帧长度,就说明发送失败
7
printf("Error
!");
如果要发送远程帧(标识符为 0x123),可采用如下方法进行发送:
1
struct can_frame
frame;
2
frame.can_id
= CAN_RTR_FLAG | 0x123;
3
write(s,
&frame, sizeof(frame));
(3). 数据接收
数据接收使用 read 函数来完成,实现如下:
1
struct can_frame
frame;
2
int nbytes
= read(s, &frame, sizeof(frame));
当然, 套接字数据收发时常用的 send、 sendto、 sendmsg 以及对应的 recv 函数也都可以用于 CAN总线数据的收发。
(4). 错误处理
当帧接收后,可以通过判断 can_id 中的 CAN_ERR_FLAG 位来判断接收的帧是否为错误帧。 如果为错误帧,可以通过 can_id 的其他符号位来判断错误的具体原因。
错误帧的符号位在头文件 linux/can/error.h 中定义。
(5).