{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 wjr0123 的文章《TQ2440 学习笔记—— 24、IIC 接口》','https://www.xiaopingtou.net/article-72473.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
(韦东山——嵌入式Linux 应用开发完全手册)
IIC 接口
IIC (Inter-Integrated Circuit)总线是一种由PHILIPS 公司开发的串行总线,用于连接微控制器及其外围设备,它具有如下特点: 1、只有两条总线线路:一条串行数据线(SDA),一条串行时钟线(SCL)。 2、每个连接到总线的器件都可以使用软件根据它的唯一的地址来识别。 3、传输数据的设备间是简单的主从关系。 4、主机可以用主机发送器或主机接收器。 5、它是一个真正的多主机总线,两个或多个主机同时发起数据传输时,可以通过冲突检验和仲裁来防止数据被破坏。 6、串行的 8 位双向数据传输,位速率在标准模式下可达100 kbit/s,在快速模式下可达 400 kbit/s,在高速模式下可达3.4Mbit/s。 7、片上的滤波器可以增强抗干扰功能,保证数据的完整。 8、连接到同一总线上的 IC 数量只受总线的最大电容400 pF 的限制。
IIC 总线术语的定义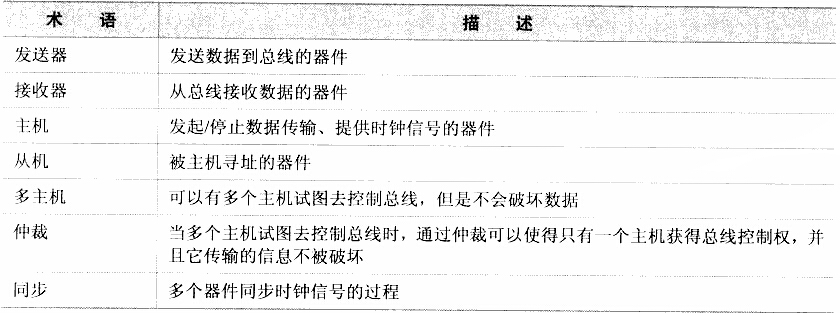
I2C在Linux中是Bus下的一个子系统. 它由客户驱动(client driver),i2c-core核心,i2c适配器驱动(adapter driver) ,算法aglorithm组成。s3c2440中有两个i2c现适配器.作为platform_device设备在系统启动先时被注册和添加。下面我们分析i2c(设备,驱动,总线)的实现过程. //填充设备资源
//struct resource结构体描述了挂接在cpu总线上的设备实体资源
//.start:i2c寄存器起始地址; .end:i2c寄存器结束地址; .flag:描述设备实体的共性和特性标志
[cpp] view plaincopy
[cpp] view plaincopy
[cpp] view plaincopy
[cpp] view plaincopy
[cpp] view plaincopy
在start_kernel()-->setup_arch()时被调用,但值得注意的是i2c适配器并没有被初始化,因为还没有驱动!
通过下面可以知道platform_device_register()和device_register()的区别:
[cpp] view plaincopy
[cpp] view plaincopy
因为所有plaform_device 的父母亲都是platform_bus,是在platform_device_add()中
[cpp] view plaincopy
在reset_init()-->kernel_init()-->do_basic_setup()
-->driver_init()-->platform_bus_init()完成platform_bus总线的注册
但是现在i2c适配器并没有和驱动绑上,因为到系现在为止驱动还没有出现呢(初始化)
只有做好前面一些的准备功夫,i2c适配器驱动才能初始化,这个是需要按照顺序来的。
s3c2440-i2c适配器驱动的初始化在drivers/i2c/bus/i2c-s3c2410.c中实现
并且作为platform_driver注册。
//填充driver结构并完成相应probe,remove等函数
[cpp] view plaincopy
[cpp] view plaincopy
[cpp] view plaincopy
IIC 接口
IIC (Inter-Integrated Circuit)总线是一种由PHILIPS 公司开发的串行总线,用于连接微控制器及其外围设备,它具有如下特点: 1、只有两条总线线路:一条串行数据线(SDA),一条串行时钟线(SCL)。 2、每个连接到总线的器件都可以使用软件根据它的唯一的地址来识别。 3、传输数据的设备间是简单的主从关系。 4、主机可以用主机发送器或主机接收器。 5、它是一个真正的多主机总线,两个或多个主机同时发起数据传输时,可以通过冲突检验和仲裁来防止数据被破坏。 6、串行的 8 位双向数据传输,位速率在标准模式下可达100 kbit/s,在快速模式下可达 400 kbit/s,在高速模式下可达3.4Mbit/s。 7、片上的滤波器可以增强抗干扰功能,保证数据的完整。 8、连接到同一总线上的 IC 数量只受总线的最大电容400 pF 的限制。
IIC 总线术语的定义
I2C在Linux中是Bus下的一个子系统. 它由客户驱动(client driver),i2c-core核心,i2c适配器驱动(adapter driver) ,算法aglorithm组成。s3c2440中有两个i2c现适配器.作为platform_device设备在系统启动先时被注册和添加。下面我们分析i2c(设备,驱动,总线)的实现过程. //填充设备资源
//struct resource结构体描述了挂接在cpu总线上的设备实体资源
//.start:i2c寄存器起始地址; .end:i2c寄存器结束地址; .flag:描述设备实体的共性和特性标志
[cpp] view plaincopy
- static struct resource s3c_i2c_resource[] = {
- [0] = {//i2c-0
- .start = S3C_PA_IIC,
- .end = S3C_PA_IIC + SZ_4K - 1,
- .flags = IORESOURCE_MEM,
- },
- [1] = {//i2c-1
- .start = IRQ_IIC,
- .end = IRQ_IIC,
- .flags = IORESOURCE_IRQ,
- },
- };
[cpp] view plaincopy
- static struct s3c2410_platform_i2c default_i2c_data0 __initdata = {
- .flags = 0,
- .slave_addr = 0x10,
- .frequency = 100*1000,
- .sda_delay = 100,
- };
- struct platform_device s3c_device_i2c0 = {
- .name = "s3c2410-i2c",
- #ifdef CONFIG_S3C_DEV_I2C1
- .id = 0,
- #else
- .id = -1,
- #endif
- .num_resources = ARRAY_SIZE(s3c_i2c_resource),
- .resource = s3c_i2c_resource,
- };
- static struct s3c2410_platform_i2c default_i2c_data0 __initdata = {
- .flags = 0,
- .slave_addr = 0x10,
- .frequency = 100*1000,
- .sda_delay = 100,
- };
[cpp] view plaincopy
- static struct platform_device *smdk2440_devices[] __initdata = {
- ...
- &s3c_device_i2c0,
- ...
- };
[cpp] view plaincopy
- void __init s3c_i2c0_set_platdata(struct s3c2410_platform_i2c *pd)
- {
- struct s3c2410_platform_i2c *npd;
- if (!pd)
- pd = &default_i2c_data0;
- npd = kmemdup(pd, sizeof(struct s3c2410_platform_i2c), GFP_KERNEL);
- if (!npd)
- printk(KERN_ERR "%s: no memory for platform data ", __func__);
- else if (!npd->cfg_gpio)
- npd->cfg_gpio = s3c_i2c0_cfg_gpio; //i2c引脚配置
- s3c_device_i2c0.dev.platform_data = npd; //挂接plat_form_data数据
- }
[cpp] view plaincopy
- static void __init smdk2440_machine_init(void)
- {
- s3c24xx_fb_set_platdata(&smdk2440_fb_info);
- s3c_i2c0_set_platdata(NULL);
- ...
- //注册和添加platform_device
- platform_add_devices(smdk2440_devices, ARRAY_SIZE(smdk2440_devices));
- ...
- }
在start_kernel()-->setup_arch()时被调用,但值得注意的是i2c适配器并没有被初始化,因为还没有驱动!
通过下面可以知道platform_device_register()和device_register()的区别:
[cpp] view plaincopy
- platform_add_devices()-->platform_device_register()-->
- platform_device_add()--> device-->add()
[cpp] view plaincopy
- plat_form_bus_init()-->device_register()-->device_register()
- -->device-->add()
因为所有plaform_device 的父母亲都是platform_bus,是在platform_device_add()中
[cpp] view plaincopy
- if (!pdev->dev.parent)
- pdev->dev.parent = &platform_bus;
在reset_init()-->kernel_init()-->do_basic_setup()
-->driver_init()-->platform_bus_init()完成platform_bus总线的注册
但是现在i2c适配器并没有和驱动绑上,因为到系现在为止驱动还没有出现呢(初始化)
只有做好前面一些的准备功夫,i2c适配器驱动才能初始化,这个是需要按照顺序来的。
s3c2440-i2c适配器驱动的初始化在drivers/i2c/bus/i2c-s3c2410.c中实现
并且作为platform_driver注册。
//填充driver结构并完成相应probe,remove等函数
[cpp] view plaincopy
- static struct platform_driver s3c2440_i2c_driver = {
- .probe = s3c24xx_i2c_probe,
- .remove = s3c24xx_i2c_remove,
- .suspend_late = s3c24xx_i2c_suspend_late,
- .resume = s3c24xx_i2c_resume,
- .driver = {
- .owner = THIS_MODULE,
- .name = "s3c2440-i2c", //
- },
- };
- static int __init i2c_adap_s3c_init(void)
- {
- int ret;
- ret = platform_driver_register(&s3c2410_i2c_driver);//
- if (ret == 0) {
- printk("register s3c2440_i2c_driver..... ");
- ret = platform_driver_register(&s3c2440_i2c_driver);
- if (ret)
- {
- printk("register s3c2410_i2c_driver..... ");
- platform_driver_unregister(&s3c2410_i2c_driver);
- }
- }
- return ret;
- }
- subsys_initcall(i2c_adap_s3c_init);
[cpp] view plaincopy
- platform_driver_register()-->driver_register()-->bus_add_driver()-->driver_attach()
- __driver_attach()-->driver_probe_device()-->s3c24xx_i2c_probe()
[cpp] view plaincopy
- i2c_add_numbered_adapter(&i2c->adap);