{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 richyhuang1977 的文章《linux 在线调试摄像头驱动》','https://www.xiaopingtou.net/article-74216.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
在使用嵌入式linux设备做点到点之间的图像传输,比如linux平台采集摄像头数据,然后通过wifi或是蓝牙等设备将图像数据发送到手机端,最后使用手机显示出图像。图像处理和图像传输是在应用层完成,在应用层写代码和调试代码都是比较容易的。但是如果需要调试摄像头驱动的一些参数,涉及到驱动层的东西就会比较的麻烦。在我使用的这个平台,假如我要调试摄像头驱动gc0308的寄存器,它需要每改一次寄存器值然后重现烧如一次固件,最后再看图像效果,这样的调试方法是在会让人奔溃。
其实,在linux的驱动中,它已经提供了一个调试v4l2 设备的接口。在linux源代码中,我们可以看到如下的定义:
 使能debug选项就可以了。
(2)驱动设备添加操作接口
在初始化struct v4l2_subdev_core_ops 结构体的时候,添加一个直接读寄存器和一个写寄存器的接口,如下:
使能debug选项就可以了。
(2)驱动设备添加操作接口
在初始化struct v4l2_subdev_core_ops 结构体的时候,添加一个直接读寄存器和一个写寄存器的接口,如下:
发送消息队列端的代码实现如下:
struct v4l2_subdev_core_ops {
int (*g_chip_ident)(struct v4l2_subdev *sd, struct v4l2_dbg_chip_ident *chip);
int (*log_status)(struct v4l2_subdev *sd);
int (*s_io_pin_config)(struct v4l2_subdev *sd, size_t n,
struct v4l2_subdev_io_pin_config *pincfg);
int (*init)(struct v4l2_subdev *sd, u32 val);
int (*load_fw)(struct v4l2_subdev *sd);
int (*reset)(struct v4l2_subdev *sd, u32 val);
int (*s_gpio)(struct v4l2_subdev *sd, u32 val);
int (*queryctrl)(struct v4l2_subdev *sd, struct v4l2_queryctrl *qc);
int (*g_ctrl)(struct v4l2_subdev *sd, struct v4l2_control *ctrl);
int (*s_ctrl)(struct v4l2_subdev *sd, struct v4l2_control *ctrl);
int (*g_ext_ctrls)(struct v4l2_subdev *sd, struct v4l2_ext_controls *ctrls);
int (*s_ext_ctrls)(struct v4l2_subdev *sd, struct v4l2_ext_controls *ctrls);
int (*try_ext_ctrls)(struct v4l2_subdev *sd, struct v4l2_ext_controls *ctrls);
int (*querymenu)(struct v4l2_subdev *sd, struct v4l2_querymenu *qm);
int (*g_std)(struct v4l2_subdev *sd, v4l2_std_id *norm);
int (*s_std)(struct v4l2_subdev *sd, v4l2_std_id norm);
long (*ioctl)(struct v4l2_subdev *sd, unsigned int cmd, void *arg);
#ifdef CONFIG_VIDEO_ADV_DEBUG
int (*g_register)(struct v4l2_subdev *sd, struct v4l2_dbg_register *reg);
int (*s_register)(struct v4l2_subdev *sd, const struct v4l2_dbg_register *reg);
#endif
int (*s_power)(struct v4l2_subdev *sd, int on);
int (*interrupt_service_routine)(struct v4l2_subdev *sd,
u32 status, bool *handled);
int (*subscribe_event)(struct v4l2_subdev *sd, struct v4l2_fh *fh,
struct v4l2_event_subscription *sub);
int (*unsubscribe_event)(struct v4l2_subdev *sd, struct v4l2_fh *fh,
struct v4l2_event_subscription *sub);
};
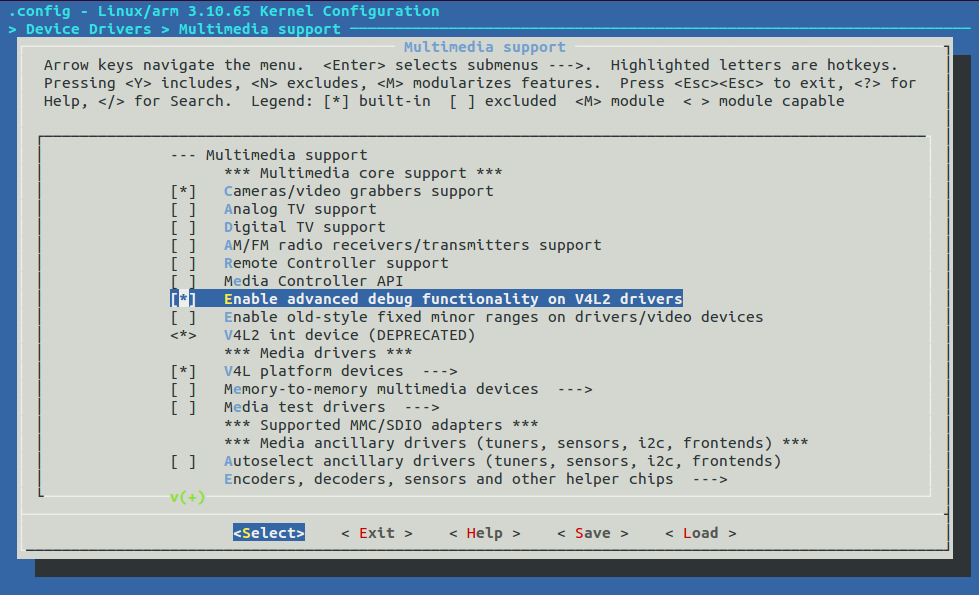
在v4l2_subdev_core_ops中已经为我们提供了直接操作v4l2 设备寄存器的接口,只需要我们定义了宏CONFIG_VIDEO_ADV_DEBUG 就可以了。下面就直接介绍该如何配置和设计在线调试。
(1)打开CONFIG_VIDEO_ADV_DEBUG 宏,该宏直接在linux的配置文件中配置就可以了,入下图:
使能debug选项就可以了。
(2)驱动设备添加操作接口
在初始化struct v4l2_subdev_core_ops 结构体的时候,添加一个直接读寄存器和一个写寄存器的接口,如下:
static const struct v4l2_subdev_core_ops sensor_core_ops = {
.g_chip_ident = sensor_g_chip_ident,
.g_ctrl = sensor_g_ctrl,
.s_ctrl = sensor_s_ctrl,
.queryctrl = sensor_queryctrl,
.reset = sensor_reset,
.init = sensor_init,
.s_power = sensor_power,
.ioctl = sensor_ioctl,
#ifdef CONFIG_VIDEO_ADV_DEBUG
.g_register = sensor_g_register,
.s_register = sensor_s_register,
#endif
};
sensor_g_register 是读取寄存器的值,sensor_s_register 是写入寄存器的值,这两个函数的定义如下:
#ifdef CONFIG_VIDEO_ADV_DEBUG
static int sensor_g_register(struct v4l2_subdev *sd, struct v4l2_dbg_register *para)
{
int ret;
unsigned short reg_addr = 0;
unsigned short reg_value = 0;
reg_addr = para->size;
ret = sensor_read(sd,reg_addr,®_value);
if(ret < 0)
{
printk("sensor_g_register ret=%d; reg_addr=%d; reg_value=%d
",ret, reg_addr, reg_value);
return ret;
}
return reg_value;
}
static int sensor_s_register(struct v4l2_subdev *sd, const struct v4l2_dbg_register *para)
{
int ret;
unsigned short reg_addr;
unsigned short reg_val;
__u32 size;
__u64 reg;
size = para->size;
reg = para->reg;
reg_addr = (unsigned short)size;
reg_val = (unsigned short)reg;
ret = sensor_write(sd, reg_addr, reg_val);
if(ret < 0)
{
printk("sensor_s_register ret = %d, reg_addr=%d, reg_val=%d
",ret,reg_addr,reg_val);
}
return ret;
}
#endif
上面的代码需要注意,在数据类型中struct v4l2_dbg_register 除了设备配对之外,它定义了三个变量,size,reg,val 。在我的平台上val 的值是怎么都传输不到这里,还有一个问题就是在内核的参数不能够返回到应用层,具体的原因没有去做更深入的分析。在这里,为了实现可以调试的功能,我使用了一种投机取巧的方法来实现。我使用size 参数来传递地址,使用reg参数来传递需要设置的寄存器的值,最后使用函数的返回值来实现读取的寄存器值返回到应用层。
(3)应用层直接操作寄存器
下面写了一个测试小程序,通过ioctl 直接访问上面驱动中实现的接口
/*=============================================================================
# FileName: test.c
# Desc: ioctl to set/get vedio driver register
# Author: licaibiao
# Version:
=============================================================================*/
#include
#include
#include
#include
#include
#include
#include
#define FILE_VIDEO "/dev/video0"
int open_camera(void)
{
int fd;
struct v4l2_input inp;
fd = open(FILE_VIDEO, O_RDWR | O_NONBLOCK,0);
if(fd < 0)
{
fprintf(stderr, "%s open err
", FILE_VIDEO);
exit(EXIT_FAILURE);
};
inp.index = 0;
if (-1 == ioctl (fd, VIDIOC_S_INPUT, &inp))
{
fprintf(stderr, "VIDIOC_S_INPUT
");
}
return fd;
}
//dbg.match.type = V4L2_CHIP_MATCH_I2C_DRIVER;
//strcpy(dbg.match.name,"gc0308");
//dbg.match.type = V4L2_CHIP_MATCH_I2C_ADDR;
//dbg.match.addr = 0x21;
void v4l2_write_reg(int fd, int reg_addr, int reg_val)
{
int ret;
struct v4l2_dbg_register dbg;
dbg.match.type = 4;
dbg.match.addr = 1;
dbg.size = (__u32)reg_addr;
dbg.reg = (__u64)reg_val;
dbg.val = 0;
ret = ioctl(fd, VIDIOC_DBG_S_REGISTER, &dbg);
if(ret < 0)
{
printf("sensor IOCTL data ERR ret = %d
",ret);
}
}
int v4l2_read_reg(int fd, int reg_addr)
{
int ret;
struct v4l2_dbg_register dbg;
dbg.match.type = 4;
dbg.match.addr = 1;
dbg.size = (__u32)reg_addr;
dbg.reg = 0;
dbg.val = 0;
ret = ioctl(fd, VIDIOC_DBG_G_REGISTER, &dbg);
if(ret < 0)
{
printf("sensor IOCTL data ERR reg_addr= %x ret = %d
",reg_addr,ret);
}
return ret;
}
void main(void)
{
int fd;
int reg_addr= 0;
int reg_val = 0;
fd = open_camera();
printf("fd = %d
",fd);
reg_addr = 0x00;
reg_val = v4l2_read_reg(fd,reg_addr);
printf(" v4l2 read reg %x value = %x
",reg_addr,reg_val);
reg_addr = 0x0f;
reg_val = v4l2_read_reg(fd,reg_addr);
printf(" v4l2 read reg %x value = %x
",reg_addr,reg_val);
reg_addr = 0x0f;
reg_val = 0x00;
v4l2_write_reg(fd, reg_addr, reg_val);
usleep(10000);
reg_addr = 0x0f;
reg_val = v4l2_read_reg(fd,reg_addr);
printf(" v4l2 read reg %x value = %x
",reg_addr,reg_val);
close(fd);
}
上面的代码需要注意一下的是struct v4l2_dbg_register 的初始化。我的是linux3.10.65 版本,在videodev2.h中有如下的定义:
/* VIDIOC_DBG_G_REGISTER and VIDIOC_DBG_S_REGISTER */
#define V4L2_CHIP_MATCH_BRIDGE 0 /* Match against chip ID on the bridge (0 for the bridge) */
#define V4L2_CHIP_MATCH_HOST V4L2_CHIP_MATCH_BRIDGE
#define V4L2_CHIP_MATCH_I2C_DRIVER 1 /* Match against I2C driver name */
#define V4L2_CHIP_MATCH_I2C_ADDR 2 /* Match against I2C 7-bit address */
#define V4L2_CHIP_MATCH_AC97 3 /* Match against anciliary AC97 chip */
#define V4L2_CHIP_MATCH_SUBDEV 4 /* Match against subdev index */
struct v4l2_dbg_match {
__u32 type; /* Match type */
union { /* Match this chip, meaning determined by type */
__u32 addr;
char name[32];
};
} __attribute__ ((packed));
struct v4l2_dbg_register {
struct v4l2_dbg_match match;
__u32 size; /* register size in bytes */
__u64 reg;
__u64 val;
} __attribute__ ((packed));
它这里需要做设备的匹配,在我的平台,我分别使用过chip ID,I2C driver name,I2C address来匹配,都没能实现设备的匹配匹配,只能使用V4L2_CHIP_MATCH_SUBDEV 来匹配,但是在我的交叉编译工具链中,前面三种方法它都定义了,唯独V4L2_CHIP_MATCH_SUBDEV没有定义,所以在上面的测试程序中我直接将 dbg.match.type = 4;
测试小程序的执行结果如下:
/tmp # ./test
v4l2 read reg 0 value = 9b
v4l2 read reg f value = 10
v4l2 read reg f value = 0
/tmp #
/tmp #
(4)将测试程序移植到图像传输工程中
实现思路是这样的,在图像传输的进程中,创建一个线程,在线程中创建一个消息队列,用来接收操作指令。另外再写一个小程序,往消息队列中发送操作指令,这样就可以实时的看到图像的效果。接收端的程序代码如下:
/*********************************************************************
* licaibiao add interface to debug v4l2 camera
*********************************************************************/
void v4l2_write_reg(int fd, int reg_addr, int reg_val)
{
int ret;
struct v4l2_dbg_register dbg;
dbg.match.type = 4;
dbg.match.addr = 1;
dbg.size = (__u32)reg_addr;
dbg.reg = (__u64)reg_val;
dbg.val = 0;
ret = ioctl(fd, VIDIOC_DBG_S_REGISTER, &dbg);
if(ret < 0)
{
printf("!!!!! sensor write data ERR !!!!! ret = %d
",ret);
}
else
{
printf("write register 0x%x value = 0x%x
", reg_addr, reg_val);
}
}
void v4l2_read_reg(int fd, int reg_addr)
{
int ret;
struct v4l2_dbg_register dbg;
dbg.match.type = 4;
dbg.match.addr = 1;
dbg.size = (__u32)reg_addr;
dbg.reg = 0;
dbg.val = 0;
ret = ioctl(fd, VIDIOC_DBG_G_REGISTER, &dbg);
if(ret < 0)
{
printf("sensor IOCTL data ERR reg_addr= %x ret = %d
",reg_addr,ret);
}
else
{
printf("read register 0x%x value = 0x%x
", reg_addr, ret);
}
}
struct msg_st
{
long int msg_type;
char text[BUFSIZ];
};
void *main_v4l2_debug_camera(void* arg)
{
int running = 1;
int msgid = -1;
int reg_addr = 0;
int reg_val = 0;
int len = 0;
int i = 0;
int fd;
struct msg_st data;
long int msgtype = 0;
fd = *(int*)arg;
printf("
enter main_v4l2_debug_camera thread
");
msgid = msgget((key_t)1234, 0666 | IPC_CREAT);
if(msgid == -1)
{
fprintf(stderr, "msgget failed with error: %d
", errno);
//exit(EXIT_FAILURE);
}
while(running)
{
len = msgrcv(msgid, (void*)&data, BUFSIZ, msgtype, 0);
if(len < 0)
{
fprintf(stderr, "msgrcv failed with errno: %d
", errno);
if(msgctl(msgid, IPC_RMID, 0))
{
printf("remove msg ERR
");
}
pthread_exit(0);
//exit(EXIT_FAILURE);
}else
{
if(strncmp(data.text, "end", 3) == 0)
{
running = 0;
if(msgctl(msgid, IPC_RMID, 0))
{
printf("remove msg ERR
");
}
pthread_exit(0);
}
for(i=1; i= '0')&&(data.text[i] <= '9'))
||((data.text[i] >= 'A')&&(data.text[i] <= 'F'))
||((data.text[i] >= 'a')&&(data.text[i] <= 'f'))
||(data.text[i] == ' '))
{
}else
{
printf("1plase enter: read/write: reg_addr: reg_value e.g. w 12 34
");
goto err;
}
}
if((data.text[0]=='W')||(data.text[0]=='w'))
{
if((data.text[1] != ' ')||(data.text[4] != ' '))
{
printf("2plase enter: read/write: reg_addr: reg_value e.g. w 12 34
");
goto err;
}
sscanf(&data.text[2], "%x", ®_addr);
sscanf(&data.text[5], "%x", ®_val);
//printf("write: addr = %x val = %x
",reg_addr, reg_val);
v4l2_write_reg(fd, reg_addr,reg_val);
}
if((data.text[0]=='R')||(data.text[0]=='r'))
{
if(data.text[1] != ' ')
{
printf("3plase enter: read/write: reg_addr: reg_value e.g. w 12 34
");
goto err;
}
sscanf(&data.text[2], "%x", ®_addr);
//printf("read : addr = %x
",reg_addr);
v4l2_read_reg(fd, reg_addr);
}
}
err:
i = i;
}
}
/********************************************************************/
添加线程:
if(pthread_create(&V4L2_Contect->msg_id, NULL, main_v4l2_debug_camera, &V4L2_Contect->mCamFd))
{
printf("V4L2 pthread create ERR !!!!
");
}
发送消息队列端的代码实现如下:
/*=============================================================================
# FileName: msg_test.c
# Desc: send message to camera process to ioctl v4l2
# Author: Licaibiao
# Version:
# LastChange: 2017-01-20
# History:
=============================================================================*/
#include
#include
#include
#include
#include
#include
#define MAX_TEXT 512
struct msg_st
{
long int msg_type;
char text[MAX_TEXT];
};
int main()
{
int running = 1;
struct msg_st data;
char buffer[BUFSIZ];
int msgid = -1;
int len;
msgid = msgget((key_t)1234, 0666 | IPC_CREAT);
if(msgid == -1)
{
fprintf(stderr, "msgget failed with error: %d
", errno);
exit(EXIT_FAILURE);
}
printf("Enter cmd format,R/W,addr,val: r/w 12 33
");
while(running)
{
printf("Enter cmd : ");
fgets(buffer, BUFSIZ, stdin);
data.msg_type = 1;
strcpy(data.text, buffer);
len = strlen(data.text);
if(msgsnd(msgid, (void*)&data, len, 0) == -1)
{
fprintf(stderr, "msgsnd failed
");
exit(EXIT_FAILURE);
}
if(strncmp(buffer, "end", 3) == 0)
running = 0;
usleep(100000);
}
exit(EXIT_SUCCESS);
}
运行结果如下:
/tmp # ./send
Enter cmd format,R/W,addr,val: r/w 12 33
Enter cmd : r 14
read register 0x14 value = 0x10
Enter cmd : w 14 13
write register 0x14 value = 0x13
Enter cmd : end
msgrcv failed with errno: 43
从上面的结果中,可以看出寄存器的读取和设置已经正常,但是在我的平台中执行:msgctl(msgid, IPC_RMID, 0) 删除消息队列的时候会出现问题,导致不能正常退出,该问题后续有时间再定位。
综上,已经可以实现V4L2 点对点传输图像的在线调试了,还遗留几个问题后续定位。
(一)struct v4l2_dbg_register 中的val变量值不能从应用层传输到驱动层。
(二)struct v4l2_dbg_register 中的变量值不能从驱动层反馈回应用层。
(三)应用层结束应用时删除消息队列出错。
这就是最近在弄的调试接口,记录下来方便大家参考,同时对于遗留问题,如果有哪位朋友有解决方案,欢迎一起讨论。
2017.01.20