{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 euxnijuoh 的文章《Exynos4412 IIC总线驱动开发(二)—— IIC 驱动开发》','https://www.xiaopingtou.net/article-75052.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
前面在Exynos4412 IIC总线驱动开发(一)—— IIC 基础概念及驱动架构分析 中学习了IIC驱动的架构,下面进入我们的驱动开发过程
首先看一张代码层次图,有助于我们的理解

上面这些代码的展示是告诉我们:linux内核和芯片提供商为我们的的驱动程序提供了 i2c驱动的框架,以及框架底层与硬件相关的代码的实现。 剩下的就是针对挂载在i2c两线上的i2c设备了device,而编写的即具体设备驱动了,这里的设备就是硬件接口外挂载的设备,而非硬件接口本身(soc硬件接口本身的驱动可以理解为总线驱动)
一、编写驱动需要完成的工作 编写具体的I2C驱动时,工程师需要处理的主要工作如下: 1)、提供I2C适配器的硬件驱动,探测,初始化I2C适配器(如申请I2C的I/O地址和中断号),驱动CPU控制的I2C适配器从硬件上产生。 2)、提供I2C控制的algorithm, 用具体适配器的xxx_xfer()函数填充i2c_algorithm的master_xfer指针,并把i2c_algorithm指针赋给i2c_adapter的algo指针。 3)、实现I2C设备驱动中的i2c_driver接口,用具体yyy的yyy_probe(),yyy_remove(),yyy_suspend(),yyy_resume()函数指针和i2c_device_id设备ID表赋给i2c_driver的probe,remove,suspend,resume和id_table指针。 4)、实现I2C设备所对应类型的具体驱动,i2c_driver只是实现设备与总线的挂接。 上面的工作中前两个属于I2C总线驱动,后面两个属于I2C设备驱动。
二、开发实例 ------------------------------------------------------------------- 开发板:Exynos4412-fs4412 Linux 内核版本:Linux 3.14 IIC 从机对象:陀螺仪MPU6050 -------------------------------------------------------------------- 1、查看原理图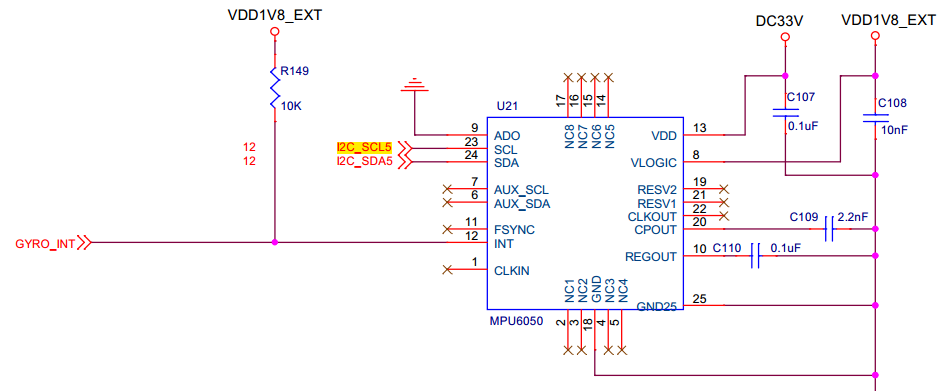 对应核心板pin
对应核心板pin

从机地址

可以获取的信息: 1、MPU6050 对应 IIC 通道5; 2、对应中断 EINT27 父节点 GPX3 3 3、因为ad0接地,所以从设备地址0x68 base address 0x138B0000
2、创建设备树节点 通过上面获取的信息,可以写出
3、MPU6050相应寄存器
4、具体程序 mpu6050.h
test.c
上面这些代码的展示是告诉我们:linux内核和芯片提供商为我们的的驱动程序提供了 i2c驱动的框架,以及框架底层与硬件相关的代码的实现。 剩下的就是针对挂载在i2c两线上的i2c设备了device,而编写的即具体设备驱动了,这里的设备就是硬件接口外挂载的设备,而非硬件接口本身(soc硬件接口本身的驱动可以理解为总线驱动)
一、编写驱动需要完成的工作 编写具体的I2C驱动时,工程师需要处理的主要工作如下: 1)、提供I2C适配器的硬件驱动,探测,初始化I2C适配器(如申请I2C的I/O地址和中断号),驱动CPU控制的I2C适配器从硬件上产生。 2)、提供I2C控制的algorithm, 用具体适配器的xxx_xfer()函数填充i2c_algorithm的master_xfer指针,并把i2c_algorithm指针赋给i2c_adapter的algo指针。 3)、实现I2C设备驱动中的i2c_driver接口,用具体yyy的yyy_probe(),yyy_remove(),yyy_suspend(),yyy_resume()函数指针和i2c_device_id设备ID表赋给i2c_driver的probe,remove,suspend,resume和id_table指针。 4)、实现I2C设备所对应类型的具体驱动,i2c_driver只是实现设备与总线的挂接。 上面的工作中前两个属于I2C总线驱动,后面两个属于I2C设备驱动。
二、开发实例 ------------------------------------------------------------------- 开发板:Exynos4412-fs4412 Linux 内核版本:Linux 3.14 IIC 从机对象:陀螺仪MPU6050 -------------------------------------------------------------------- 1、查看原理图
对应核心板pin从机地址
可以获取的信息: 1、MPU6050 对应 IIC 通道5; 2、对应中断 EINT27 父节点 GPX3 3 3、因为ad0接地,所以从设备地址0x68 base address 0x138B0000
2、创建设备树节点 通过上面获取的信息,可以写出
i2c@138b0000 {
#address-cells = <1>;
#size-cells = <0>;
samsung,i2c-sda-delay = <100>;
samsung,i2c-max-bus-freq = <20000>;
pinctrl-0 = <&i2c5_bus>;
pinctrl-names = "default";
status = "okay";
pmu6050-3-asix@68 {
compatible = "invense,mpu6050";
reg = <0x68>;
interrupt-parent = <&gpx3>;
interrupts = <3 2>;
};
};3、MPU6050相应寄存器
#define SMPLRT_DIV 0x19 //采样率分频,典型值: 0x07(125Hz) */
#define CONFIG 0x1A // 低通滤波频率,典型值: 0x06(5Hz) */
#define GYRO_CONFIG 0x1B // 陀螺仪自检及测量范围,典型值: 0x18(不自检,2000deg/s) */
#define ACCEL_CONFIG 0x1C // 加速计自检、测量范围及高通滤波频率,典型值: 0x01(不自检, 2G, 5Hz) */
#define ACCEL_XOUT_H 0x3B // 存储最近的 X 轴、 Y 轴、 Z 轴加速度感应器的测量值 */
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41 // 存储的最近温度传感器的测量值 */
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43 // 存储最近的 X 轴、 Y 轴、 Z 轴陀螺仪感应器的测量值 */
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48
#define PWR_MGMT_1 0x6B // 电源管理,典型值: 0x00(正常启用) */
#define WHO_AM_I 0x75 //IIC 地址寄存器(默认数值 0x68,只读) */4、具体程序 mpu6050.h
#ifndef MPU6050_HHHH
#define MPU6050_HHHH
#define MPU6050_MAGIC 'K'
union mpu6050_data
{
struct {
unsigned short x;
unsigned short y;
unsigned short z;
}accel;
struct {
unsigned short x;
unsigned short y;
unsigned short z;
}gyro;
unsigned short temp;
};
#define GET_ACCEL _IOR(MPU6050_MAGIC, 0, union mpu6050_data)
#define GET_GYRO _IOR(MPU6050_MAGIC, 1, union mpu6050_data)
#define GET_TEMP _IOR(MPU6050_MAGIC, 2, union mpu6050_data)
#endif
i2c_driver
#include
#include
#include
#include
#include
#include
#include
#include
#include "mpu6050.h"
MODULE_LICENSE("GPL");
#define SMPLRT_DIV 0x19
#define CONFIG 0x1A
#define GYRO_CONFIG 0x1B
#define ACCEL_CONFIG 0x1C
#define ACCEL_XOUT_H 0x3B
#define ACCEL_XOUT_L 0x3C
#define ACCEL_YOUT_H 0x3D
#define ACCEL_YOUT_L 0x3E
#define ACCEL_ZOUT_H 0x3F
#define ACCEL_ZOUT_L 0x40
#define TEMP_OUT_H 0x41
#define TEMP_OUT_L 0x42
#define GYRO_XOUT_H 0x43
#define GYRO_XOUT_L 0x44
#define GYRO_YOUT_H 0x45
#define GYRO_YOUT_L 0x46
#define GYRO_ZOUT_H 0x47
#define GYRO_ZOUT_L 0x48
#define PWR_MGMT_1 0x6B
#define MPU6050_MAJOR 500
#define MPU6050_MINOR 0
struct mpu6050_device {
struct cdev cdev;
struct i2c_client *client;
};
struct mpu6050_device *mpu6050;
static int mpu6050_read_byte(struct i2c_client *client, unsigned char reg)
{
int ret;
char txbuf[1] = { reg };
char rxbuf[1];
struct i2c_msg msg[2] = {
{client->addr, 0, 1, txbuf},
{client->addr, I2C_M_RD, 1, rxbuf}
};
ret = i2c_transfer(client->adapter, msg, ARRAY_SIZE(msg));
if (ret < 0) {
printk("ret = %d
", ret);
return ret;
}
return rxbuf[0];
}
static int mpu6050_write_byte(struct i2c_client *client, unsigned char reg, unsigned char val)
{
char txbuf[2] = {reg, val};
struct i2c_msg msg[2] = {
{client->addr, 0, 2, txbuf},
};
i2c_transfer(client->adapter, msg, ARRAY_SIZE(msg));
return 0;
}
static int mpu6050_open(struct inode *inode, struct file *file)
{
return 0;
}
static int mpu6050_release(struct inode *inode, struct file *file)
{
return 0;
}
static long mpu6050_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
union mpu6050_data data;
struct i2c_client *client = mpu6050->client;
switch(cmd) {
case GET_ACCEL:
data.accel.x = mpu6050_read_byte(client, ACCEL_XOUT_L);
data.accel.x |= mpu6050_read_byte(client, ACCEL_XOUT_H) << 8;
data.accel.y = mpu6050_read_byte(client, ACCEL_YOUT_L);
data.accel.y |= mpu6050_read_byte(client, ACCEL_YOUT_H) << 8;
data.accel.z = mpu6050_read_byte(client, ACCEL_ZOUT_L);
data.accel.z |= mpu6050_read_byte(client, ACCEL_ZOUT_H) << 8;
break;
case GET_GYRO:
data.gyro.x = mpu6050_read_byte(client, GYRO_XOUT_L);
data.gyro.x |= mpu6050_read_byte(client, GYRO_XOUT_H) << 8;
data.gyro.y = mpu6050_read_byte(client, GYRO_YOUT_L);
data.gyro.y |= mpu6050_read_byte(client, GYRO_YOUT_H) << 8;
data.gyro.z = mpu6050_read_byte(client, GYRO_ZOUT_L);
data.gyro.z |= mpu6050_read_byte(client, GYRO_ZOUT_H) << 8;
break;
case GET_TEMP:
data.temp = mpu6050_read_byte(client, TEMP_OUT_L);
data.temp |= mpu6050_read_byte(client, TEMP_OUT_H) << 8;
break;
default:
printk("invalid argument
");
return -EINVAL;
}
if (copy_to_user((void *)arg, &data, sizeof(data)))
return -EFAULT;
return sizeof(data);
}
struct file_operations mpu6050_fops = {
.owner = THIS_MODULE,
.open = mpu6050_open,
.release = mpu6050_release,
.unlocked_ioctl = mpu6050_ioctl,
};
static int mpu6050_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
int ret;
dev_t devno = MKDEV(MPU6050_MAJOR, MPU6050_MINOR);
printk("match OK!
");
mpu6050 = kzalloc(sizeof(*mpu6050), GFP_KERNEL);
if (mpu6050 == NULL) {
return -ENOMEM;
}
mpu6050->client = client;
ret = register_chrdev_region(devno, 1, "mpu6050");
if (ret < 0) {
printk("failed to register char device region!
");
goto err1;
}
cdev_init(&mpu6050->cdev, &mpu6050_fops);
mpu6050->cdev.owner = THIS_MODULE;
ret = cdev_add(&mpu6050->cdev, devno, 1);
if (ret < 0) {
printk("failed to add device
");
goto err2;
}
mpu6050_write_byte(client, PWR_MGMT_1, 0x00);
mpu6050_write_byte(client, SMPLRT_DIV, 0x07);
mpu6050_write_byte(client, CONFIG, 0x06);
mpu6050_write_byte(client, GYRO_CONFIG, 0xF8);
mpu6050_write_byte(client, ACCEL_CONFIG, 0x19);
return 0;
err2:
unregister_chrdev_region(devno, 1);
err1:
kfree(mpu6050);
return ret;
}
static int mpu6050_remove(struct i2c_client *client)
{
dev_t devno = MKDEV(MPU6050_MAJOR, MPU6050_MINOR);
cdev_del(&mpu6050->cdev);
unregister_chrdev_region(devno, 1);
kfree(mpu6050);
return 0;
}
static const struct i2c_device_id mpu6050_id[] = {
{ "mpu6050", 0},
{}
};
static struct of_device_id mpu6050_dt_match[] = {
{.compatible = "invense,mpu6050" },
{/*northing to be done*/},
};
struct i2c_driver mpu6050_driver = {
.driver = {
.name = "mpu6050",
.owner = THIS_MODULE,
.of_match_table = of_match_ptr(mpu6050_dt_match),
},
.probe = mpu6050_probe,
.remove = mpu6050_remove,
.id_table = mpu6050_id,
};
static init _init mpu6050_init(void)
{
return i2c_add_driver(&mpu6050_driver);
}
static void _exit mpu6050_exit(void)
{
return i2c_del_driver(&mpu6050_driver);
}
module_init(&mpu6050_init);
module_exit(&mpu6050_exit);
test.c
#include
#include
#include
#include
#include
#include "mpu6050.h"
int main(int argc, const char *argv[])
{
int fd;
union mpu6050_data data;
fd = open("/dev/mpu6050", O_RDWR);
if (fd < 0) {
perror("open");
exit(1);
}
while(1) {
ioctl(fd, GET_ACCEL, &data);
printf("acceleration data: x = %04x, y = %04x, z = %04x
",
data.accel.x, data.accel.y, data.accel.z);
ioctl(fd, GET_GYRO, &data);
printf("gyroscope data: x = %04x, y = %04x, z = %04x
",
data.accel.x, data.accel.y, data.accel.z);
sleep(1);
}
close(fd);
return 0;
}