{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 hhz520520 的文章《linux网络设备—mdio总线》','https://www.xiaopingtou.net/article-75208.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
一.结构体
1.调用mdiobus_alloc函数分配内存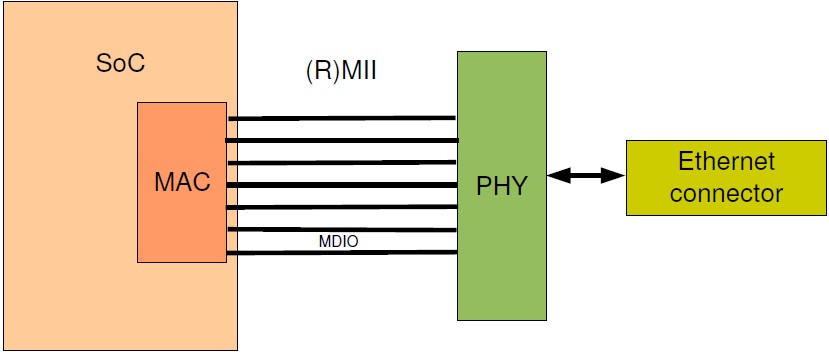
struct mii_bus {
const char *name; //总线名
char id[MII_BUS_ID_SIZE]; //id
void *priv; //私有数据
int (*read)(struct mii_bus *bus, int phy_id, int regnum); //读方法
int (*write)(struct mii_bus *bus, int phy_id, int regnum, u16 val); //写方法
int (*reset)(struct mii_bus *bus); //复位
struct mutex mdio_lock;
struct device *parent; //父设备
enum {
MDIOBUS_ALLOCATED = 1,
MDIOBUS_REGISTERED,
MDIOBUS_UNREGISTERED,
MDIOBUS_RELEASED,
} state; //总线状态
struct device dev; //设备文件
struct phy_device *phy_map[PHY_MAX_ADDR]; //PHY设备数组
u32 phy_mask;
int *irq; //中断
};
二.初始化过程
在phy_init函数中调用了mdio_bus_init初始化mdio总线
int __init mdio_bus_init(void)
{
int ret;
ret = class_register(&mdio_bus_class); //注册设备类
if (!ret) {
ret = bus_register(&mdio_bus_type); //注册mdio总线
if (ret)
class_unregister(&mdio_bus_class);
}
return ret;
}
设备类"/sys/class/mdio_bus"
static struct class mdio_bus_class = {
.name = "mdio_bus",
.dev_release = mdiobus_release,
};
总线类型"/sys/bus/mdio"
struct bus_type mdio_bus_type = {
.name = "mdio_bus",
.match = mdio_bus_match, //匹配方法
.pm = MDIO_BUS_PM_OPS,
};
EXPORT_SYMBOL(mdio_bus_type);
三.mdio总线注册1.调用mdiobus_alloc函数分配内存
struct mii_bus *mdiobus_alloc(void)
{
struct mii_bus *bus;
bus = kzalloc(sizeof(*bus), GFP_KERNEL); //分配内存
if (bus != NULL)
bus->state = MDIOBUS_ALLOCATED;
return bus;
}
EXPORT_SYMBOL(mdiobus_alloc);
2.填充mii_bus的结构体成员
mii_bus->name = ;
mii_bus->read = ;
mii_bus->write = ;
mii_bus->reset = ;
mii_bus->parent = ;
mii_bus->priv = ;
mii_bus->id = ;
3.注册mii_bus
int mdiobus_register(struct mii_bus *bus)
{
int i, err;
if (NULL == bus || NULL == bus->name || NULL == bus->read ||NULL == bus->write)
return -EINVAL;
BUG_ON(bus->state != MDIOBUS_ALLOCATED &&bus->state != MDIOBUS_UNREGISTERED);
bus->dev.parent = bus->parent;
bus->dev.class = &mdio_bus_class; //总线设备类"/sys/bus/mdio_bus"
bus->dev.groups = NULL;
dev_set_name(&bus->dev, "%s", bus->id); //设置总线设备名
err = device_register(&bus->dev); //注册设备文件
if (err) {
printk(KERN_ERR "mii_bus %s failed to register
", bus->id);
return -EINVAL;
}
mutex_init(&bus->mdio_lock);
if (bus->reset)
bus->reset(bus); //总线复位
for (i = 0; i < PHY_MAX_ADDR; i++) {
if ((bus->phy_mask & (1 << i)) == 0) {
struct phy_device *phydev;
phydev = mdiobus_scan(bus, i); //扫描phy设备
if (IS_ERR(phydev)) {
err = PTR_ERR(phydev);
goto error;
}
}
}
bus->state = MDIOBUS_REGISTERED; //状态设置为已注册
pr_info("%s: probed
", bus->name);
return 0;
error:
while (--i >= 0) {
if (bus->phy_map[i])
device_unregister(&bus->phy_map[i]->dev);
}
device_del(&bus->dev);
return err;
}
EXPORT_SYMBOL(mdiobus_register);
调用了mdiobus_scan函数
struct phy_device *mdiobus_scan(struct mii_bus *bus, int addr)
{
struct phy_device *phydev;
int err;
phydev = get_phy_device(bus, addr); //获取创建phy设备
if (IS_ERR(phydev) || phydev == NULL)
return phydev;
err = phy_device_register(phydev); //注册phy设备
if (err) {
phy_device_free(phydev);
return NULL;
}
return phydev;
}
EXPORT_SYMBOL(mdiobus_scan);
动态地创建了PHY设备
四.mii、mdio、phy、mac关系图