{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 zjc156m 的文章《DM8168 DVRRDK DSP算法开发(OSD)》','https://www.xiaopingtou.net/article-76273.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
1 系统编译
① Linux端(A8)编译命令:
make –s dvr_rdk_linux 在文件夹 DVRRDK_04.01.00.02/dvr_rdk/bin/ti816x/bin/生成
dvr_rdk_demo_mcfw_api.out
linux可执行程序,需要将该应用程序移动到下列目录并覆盖:
DVRRDK_04.01.00.02/target/rfs_816x/home/root/ti816x/
② Bios6端(DSP)编译命令:
make –s dvr_rdk_bios6 在文件夹 DVRRDK_04.01.00.02/dvr_rdk/bin/ti816x/firmware/生成
dvr_rdk_fw_c6xdsp_1024M_256M.xe674
dvr_rdk_fw_m3video_1024M_256M.xem3
dvr_rdk_fw_m3vpss_1024M_256M.xem3
将这三个文件移动到下列文件夹并覆盖:
DVRRDK_04.01.00.02/target/rfs_816x/home/root/ti816x/firmware/
2 运行程序
① 加载驱动
./init.sh : 加载程序运行需要的linux内核模块./init.sh will load the kernel modules (.ko) needed for the SDK demo
② 加载M3固件
./load.sh : 加载Video-M3和VPSS-M3的固件./load.sh will load the executable on the Video-M3 and VPSS-M3 processor and wait until these processor’s have finished their initialization
③ 运行程序
./run.sh : 运行A8端的linux应用程序./run.sh will run the A8 side application. After running the application you will be presented with a menu of options.
④ 卸载固件
./unload.sh : 卸载Video-M3和VPSS-M3的固件./unload.sh will send a stop command to both processors and wait until they finish their shutdown sequence. Then the executable will be “unloaded”.
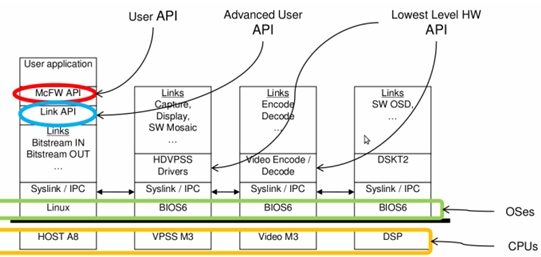
3 Sys Link
① 软件框架Link
② Cap–Dis Link demo
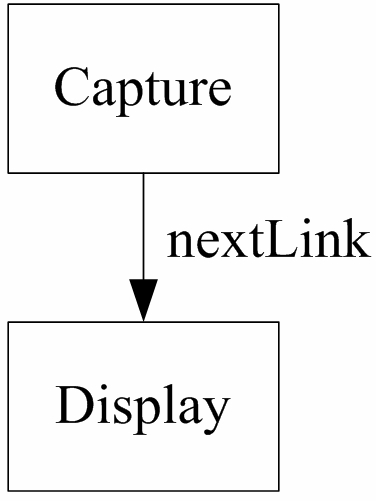
CaptureLink_CreateParams_Init(&capturePrm);
capturePrm.numVipInst = 1;
capturePrm.outQueParams[0].nextLink = gVdisModuleContext.displayId[0];
capturePrm.tilerEnable = FALSE;
capturePrm.enableSdCrop = FALSE;
pCaptureInstPrm = &capturePrm.vipInst[0];
pCaptureInstPrm->vipInstId = SYSTEM_CAPTURE_INST_VIP0_PORTA;
pCaptureInstPrm->videoDecoderId = 0;
pCaptureInstPrm->inDataFormat = SYSTEM_DF_YUV422P;
pCaptureInstPrm->standard = SYSTEM_STD_1080P_60;
pCaptureInstPrm->numOutput = 1;
pCaptureInstPrm->inScanFormat = SYSTEM_SF_PROGRESSIVE;
pCaptureOutPrm = &pCaptureInstPrm->outParams[0];
pCaptureOutPrm->dataFormat =SYSTEM_DF_YUV422I_YUYV;
pCaptureOutPrm->scEnable = FALSE;
pCaptureOutPrm->scOutWidth = 0;
pCaptureOutPrm->scOutHeight = 0;
pCaptureOutPrm->outQueId = 0;
displayPrm.inQueParams[0].prevLinkId = gVcapModuleContext.captureId;
displayPrm.inQueParams[0].prevLinkQueId = 0;
displayPrm.displayRes = VSYS_STD_1080P_60;
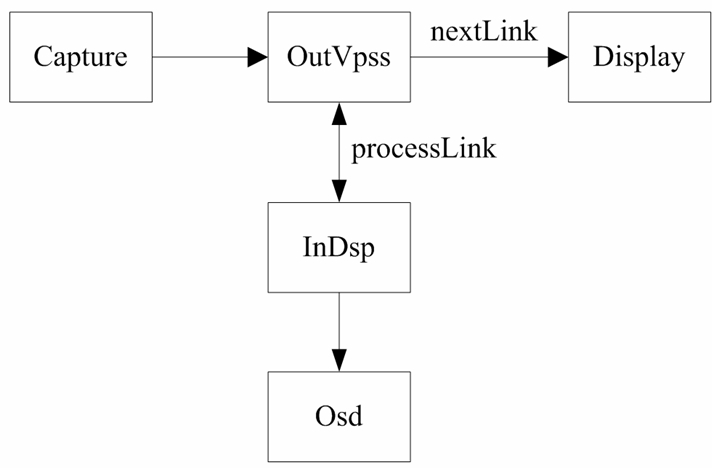
③ Cap–OSD–Dis Link (DSP核处理图像)
CaptureLink_CreateParams_Init(&capturePrm);
capturePrm.numVipInst = 1;
capturePrm.outQueParams[0].nextLink = ipcFramesOutVpssId;
capturePrm.tilerEnable = FALSE;
capturePrm.enableSdCrop = FALSE;
pCaptureInstPrm = &capturePrm.vipInst[0];
pCaptureInstPrm->vipInstId = SYSTEM_CAPTURE_INST_VIP0_PORTA;
pCaptureInstPrm->videoDecoderId = 0;
pCaptureInstPrm->inDataFormat = SYSTEM_DF_YUV422P;
pCaptureInstPrm->standard = SYSTEM_STD_1080P_60;
pCaptureInstPrm->numOutput = 1;
pCaptureInstPrm->inScanFormat= SYSTEM_SF_PROGRESSIVE;
pCaptureOutPrm = &pCaptureInstPrm->outParams[0];
pCaptureOutPrm->dataFormat =SYSTEM_DF_YUV422I_YUYV;
pCaptureOutPrm->scEnable = FALSE;
pCaptureOutPrm->scOutWidth = 0;
pCaptureOutPrm->scOutHeight = 0;
pCaptureOutPrm->outQueId = 0;
IpcFramesOutLinkRTOS_CreateParams_Init(&ipcFramesOutVpssPrm);
ipcFramesOutVpssPrm.baseCreateParams.inQueParams.prevLinkId = gVcapModuleContext.captureId;
ipcFramesOutVpssPrm.baseCreateParams.inQueParams.prevLinkQueId = 0;
ipcFramesOutVpssPrm.baseCreateParams.inputFrameRate = 25;
ipcFramesOutVpssPrm.baseCreateParams.outputFrameRate = 25;
ipcFramesOutVpssPrm.baseCreateParams.notifyPrevLink = TRUE;
ipcFramesOutVpssPrm.baseCreateParams.equallyDivideChAcrossOutQues = TRUE;
ipcFramesOutVpssPrm.baseCreateParams.numOutQue =1;
ipcFramesOutVpssPrm.baseCreateParams.outQueParams[0].nextLink= gVdisModuleContext.displayId[0];
ipcFramesOutVpssPrm.baseCreateParams.processLink = ipcFramesInDspId;
ipcFramesOutVpssPrm.baseCreateParams.notifyProcessLink = TRUE;
ipcFramesOutVpssPrm.baseCreateParams.notifyNextLink = TRUE;
ipcFramesOutVpssPrm.baseCreateParams.noNotifyMode = FALSE;//TRUE;
IpcFramesInLinkRTOS_CreateParams_Init(&ipcFramesInDspPrm);
ipcFramesInDspPrm.baseCreateParams.inQueParams.prevLinkId =ipcFramesOutVpssId;
ipcFramesInDspPrm.baseCreateParams.inQueParams.prevLinkQueId = 0;
ipcFramesInDspPrm.baseCreateParams.numOutQue = 1;
ipcFramesInDspPrm.baseCreateParams.outQueParams[0].nextLink = osdId;
ipcFramesInDspPrm.baseCreateParams.inputFrameRate = 25;
ipcFramesInDspPrm.baseCreateParams.outputFrameRate = 25;
ipcFramesInDspPrm.baseCreateParams.notifyNextLink =TRUE;
ipcFramesInDspPrm.baseCreateParams.notifyPrevLink = TRUE;
ipcFramesInDspPrm.baseCreateParams.noNotifyMode = FALSE;
AlgLink_CreateParams_Init(&osdPrm);
osdPrm.inQueParams.prevLinkId = ipcFramesInDspId;
osdPrm.inQueParams.prevLinkQueId = 0;
osdPrm.enableOSDAlg = TRUE;
osdPrm.enableSCDAlg = FALSE;
AlgLink_OsdChWinParams *chWinPrm=&osdPrm.osdChCreateParams[0].chDefaultParams;
osdPrm.osdChCreateParams[0].maxHeight =64;
osdPrm.osdChCreateParams[0].maxWidth =320;
chWinPrm->chId =0 ;
chWinPrm->numWindows =1;
chWinPrm->colorKey[0] = 0xfa; /* Y */
chWinPrm->colorKey[1] = 0x7e; /* U */
chWinPrm->colorKey[2] = 0x7d; /* V */
chWinPrm->winPrm[0].startX = CHAINS_OSD_WIN0_STARTX; chWinPrm->winPrm[0].startY = CHAINS_OSD_WIN0_STARTY;
chWinPrm->winPrm[0].format = SYSTEM_DF_YUV422I_YUYV;
chWinPrm->winPrm[0].width = CHAINS_OSD_WIN_WIDTH;
chWinPrm->winPrm[0].height = CHAINS_OSD_WIN_HEIGHT;
chWinPrm->winPrm[0].lineOffset = CHAINS_OSD_WIN_PITCH;
chWinPrm->winPrm[0].globalAlpha= CHAINS_OSD_GLOBAL_ALPHA;
chWinPrm->winPrm[0].transperencyEnable = CHAINS_OSD_TRANSPARENCY;
chWinPrm->winPrm[0].enableWin=CHAINS_OSD_ENABLE_WIN;
displayPrm.inQueParams[0].prevLinkId = ipcFramesOutVpssId;
displayPrm.inQueParams[0].prevLinkQueId = 0;
displayPrm.displayRes = VSYS_STD_1080P_60;4 DSP 图像算法
① 算法添写位置:
打开mcfw/src_bios6/links_c6xdsp/alg_link/swosd/osdLink_alg.c:第266行:
pSwOsdObj->videoWindowAddr = pFrame->addr[0][0];
pFrame->addr[0][0]指针即为图像的存储位置
使用方法:
Uint8 *buff=pFrame->addr[0][0];
for(i=0;i<1080;i++)
{
for(j=0;j<1920;j++)
{
*(buff+2*j)=128;
}
buff=buff+1920*2;
}该例子简单的修改了每个像素点的Y值。② 效果测试:
