{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 865634852@qq.co 的文章《三兄弟旗舰版TI28335DSP—核心板GPIO电灯操作—CCS6》','https://www.xiaopingtou.net/article-76547.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
操作GPIO点灯核心板LD1、LD2可以使用(当然在此之前要step 1:PLL, WatchDog, enable Peripheral Clocks;step 2:Clear all interrupts and initialize PIE vector table;
step3:然后就是GPIO配置)
1、GPBDAT 数据寄存器
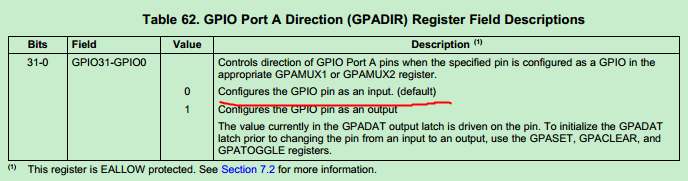
配置GPIO复用(对应寄存器GPAMUX2)为GPIO功能 配置GPIO为输出(GPBDIR)默认为输入,0为输入,1为输出 函数中配置GPBDAT为1高电平,延时,在为0低电平,延时(如果配置GPIO为输入模式,GPBDAT为1时锁存,而不输出)
2、GPBSET/GPBCLEAR 设置 / 清除寄存器 这两个寄存器设置为0不起错用,设置为1时起作用,GPBSET为1,驱动输出高电平,GPBCLEAR为1,,驱动清低电平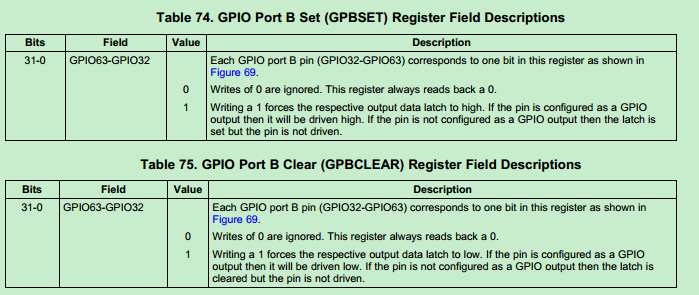 3、GPATOGGLE 反转寄存器
为0时不起作用,为1时反转当前状态
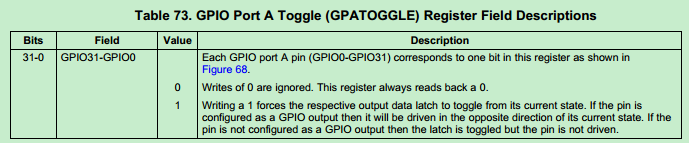
3、GPATOGGLE 反转寄存器
为0时不起作用,为1时反转当前状态
配置GPIO复用(对应寄存器GPAMUX2)为GPIO功能 配置GPIO为输出(GPBDIR)默认为输入,0为输入,1为输出 函数中配置GPBDAT为1高电平,延时,在为0低电平,延时(如果配置GPIO为输入模式,GPBDAT为1时锁存,而不输出)
2、GPBSET/GPBCLEAR 设置 / 清除寄存器 这两个寄存器设置为0不起错用,设置为1时起作用,GPBSET为1,驱动输出高电平,GPBCLEAR为1,,驱动清低电平
3、GPATOGGLE 反转寄存器
为0时不起作用,为1时反转当前状态
#include "DSP28x_Project.h" // Device Headerfile and Examples Include File
// Select the example to compile in. Only one example should be set as 1
// the rest should be set as 0.
#define EXAMPLE1 0 // Use DATA registers to toggle I/O's
#define EXAMPLE2 0 // Use SET/CLEAR registers to toggle I/O's
#define EXAMPLE3 1 // Use TOGGLE registers to toggle I/O's
// Prototype statements for functions found within this file.
void delay_loop(void);
void Gpio_select(void);
void Gpio_example1(void);
void Gpio_example2(void);
void Gpio_example3(void);
void main(void)
{
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the DSP2833x_SysCtrl.c file.
InitSysCtrl();
// Step 2. Initalize GPIO:
// This example function is found in the DSP2833x_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
// InitGpio(); // Skipped for this example
// For this example use the following configuration:
Gpio_select();
// Step 3. Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
DINT;
// Initialize PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the DSP2833x_PieCtrl.c file.
InitPieCtrl();
// Disable CPU interrupts and clear all CPU interrupt flags:
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in DSP2833x_DefaultIsr.c.
// This function is found in DSP2833x_PieVect.c.
InitPieVectTable();
// Step 4. Initialize all the Device Peripherals:
// This function is found in DSP2833x_InitPeripherals.c
// InitPeripherals(); // Not required for this example
// Step 5. User specific code:
#if EXAMPLE1
// This example uses DATA registers to toggle I/O's
Gpio_example1();
#endif // - EXAMPLE1
#if EXAMPLE2
// This example uses SET/CLEAR registers to toggle I/O's
Gpio_example2();
#endif
#if EXAMPLE3
// This example uses TOGGLE registers to toggle I/O's
Gpio_example3();
#endif
}
void delay_loop()
{
volatile long i;
for (i = 0; i < 1000000; i++) {}
}
void Gpio_example1(void)
{
// Example 1:
// Toggle I/Os using DATA registers
// GPIO7 is used for buzzer
for(;;)
{
//LD3 -> GPIO32
//LD1/2 ->GPIO60/61
// GpioDataRegs.GPADAT.all =0xAAAAAAAA; // 1010 A
GpioDataRegs.GPBDAT.all =0x3000000A; // 32-63
delay_loop();
// GpioDataRegs.GPADAT.all =0x55555555; // 0101 5
GpioDataRegs.GPBDAT.all =0x00000005;
delay_loop();
}
}
void Gpio_example2(void)
{
// Example 2:
// Toggle I/Os using SET/CLEAR registers
for(;;)
{
GpioDataRegs.GPASET.all =0xAAAAAAAA;
GpioDataRegs.GPACLEAR.all =0x55555555; // set/clear register 1 is work
GpioDataRegs.GPBSET.all =0x3000000A;
GpioDataRegs.GPBCLEAR.all =0x00000005;
delay_loop();
GpioDataRegs.GPACLEAR.all =0xAAAAAAAA;
GpioDataRegs.GPASET.all =0x55555555;
GpioDataRegs.GPBCLEAR.all =0x3000000A;
GpioDataRegs.GPBSET.all =0x00000005;
delay_loop();
}
}
void Gpio_example3(void)
{
// Example 2:
// Toggle I/Os using TOGGLE registers
// Set pins to a known state
GpioDataRegs.GPASET.all =0xAAAAAAAA;
GpioDataRegs.GPACLEAR.all =0x55555555;
GpioDataRegs.GPBSET.all =0x3000000A;
GpioDataRegs.GPBCLEAR.all =0x00000005;
// Use TOGGLE registers to flip the state of
// the pins.
// Any bit set to a 1 will flip state (toggle)
// Any bit set to a 0 will not toggle.
for(;;)
{
GpioDataRegs.GPATOGGLE.all =0xFFFFFFFF;
GpioDataRegs.GPBTOGGLE.all =0x3000000F;
delay_loop();
}
}
void Gpio_select(void)
{
EALLOW;
GpioCtrlRegs.GPAMUX1.all = 0x00000000; // All GPIO
GpioCtrlRegs.GPAMUX2.all = 0x00000000; // All GPIO
//GpioCtrlRegs.GPAMUX1.all = 0x00000000; // All GPIO
GpioCtrlRegs.GPADIR.all = 0xFFFFFFFF; // All outputs
GpioCtrlRegs.GPBDIR.all = 0x3000000F; // All outputs
EDIS;
}