{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 使者0123 的文章《Feedforward ANC 主动降噪原理》','https://www.xiaopingtou.net/article-77731.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
概述
ANC指Active Noise Control,主动降噪。基本原理是降噪系统产生与外界噪音相等的反向声波,将噪音中和。图1是feedforward式主动降噪耳机的示意图。ANC芯片放置在耳机内。Ref mic(reference microphone)在耳机耳罩上,采集环境噪音。Error mic(Error Microphone)在耳机内,采集降噪处理后的残差噪声。Speaker播放ANC处理后的anti-noise。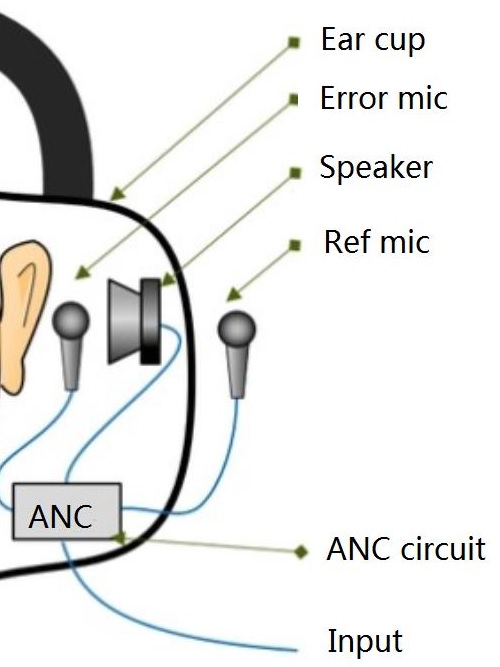
图1
原理
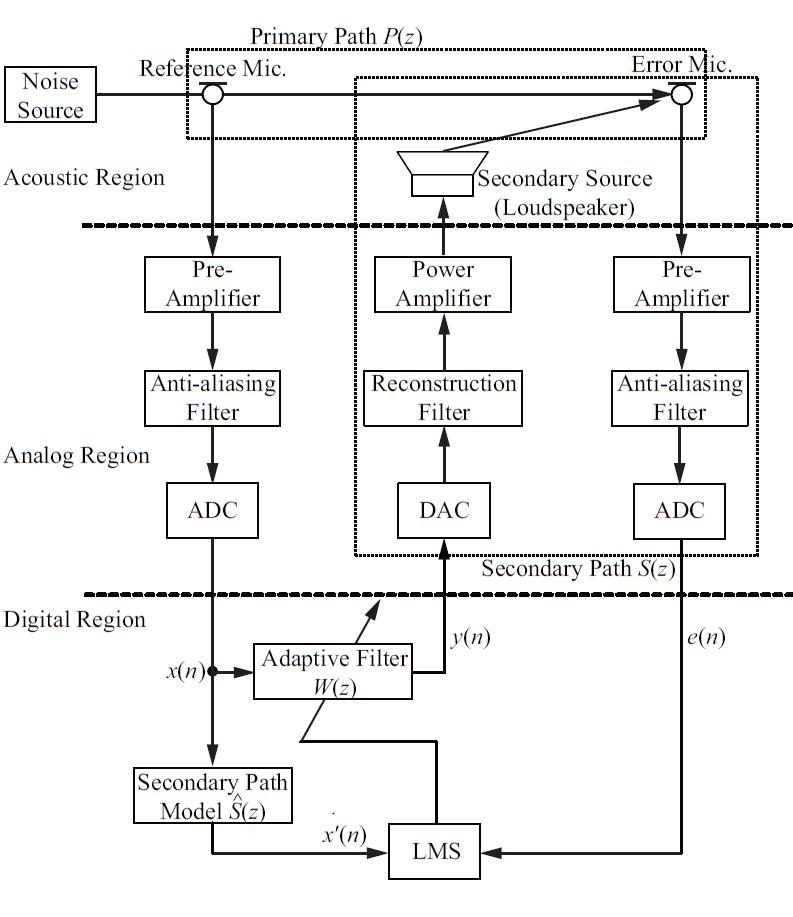
图2
图2是ANC系统的原理图,一共三层,用虚线分隔。最上一层primary path是从ref mic到error mic的声学通道,响应函数用
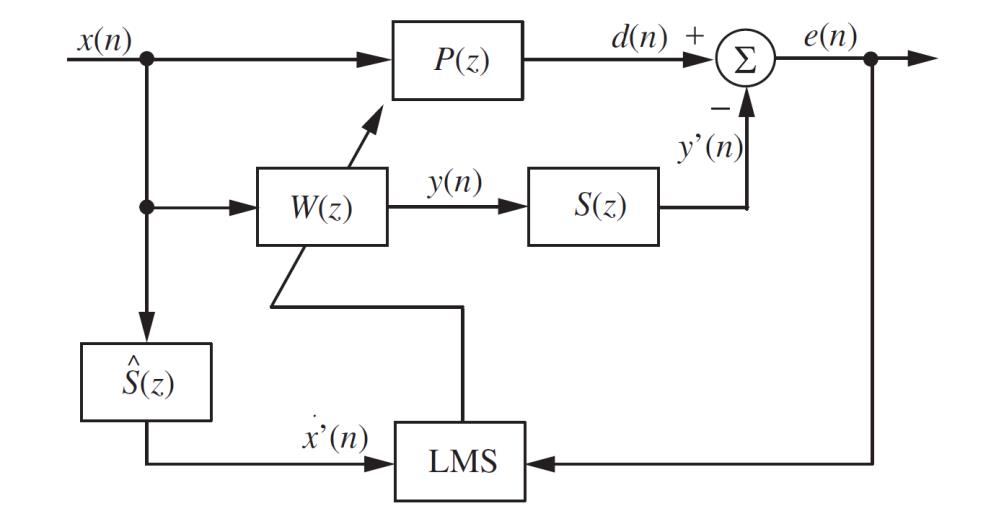
图3
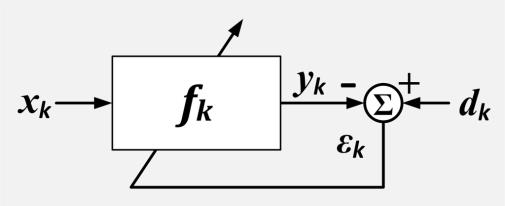
图4
所以gradient=
Matlab验证
写Matlab代码,用变步长LMS的adaptive filter,得仿真结果如图5。在0到2KHz范围内,利用feedforward ANC消高斯白噪,噪声衰减平均30dB+。Matlab库里的FXLMS是定步长的,效果要差一些。
图5
Q&A
遇到的困惑写出来分享一下。1. ANC为什么只针对2kHz以下的低频噪音?
一方面,耳机的物理隔音方式(被动降噪)可以有效阻挡高频噪音,没必要用ANC降高频噪声。另一方面,低频噪声波长较长,可以承受一定的相位延迟,而高频噪声波长短,对相位偏差敏感,因此ANC消高频噪声并不理想。
2. 当electronic delay比primary delay大时,算法性能大大下降如何理解?
P(z)延时小,S(z)延时大,比如P(z)=z-1, S(z)=z-2,只有当W(z)=z才能满足要求,非因果,unreachable。
3. Feedforward ANC、narrow-band feedforward ANC、feedback ANC有什么区别?
Feedforwad结构有一个ref mic和一个error mic,分别采集外部噪音和内部残差信号。feedback结构只有一个error mic,由error mic和adaptive filter output生成reference signal。
Broad-band feedforward就是上面所述结构,而narrow-band结构中,noise source会产生某个signal触发signal generator,signal generator再生成reference signal送给adaptive filter。只适用于消除periodic noise。
Feedback ANC由于只有error mic,用error mic来恢复feedforward结构中ref mic采集的信号,通路不满足因果约束,因此只消除predictable noise components,即窄带周期性噪声。需要注意的是,feedforward如果不满足因果约束,即electronic delay比主通道acoustic delay长的话,也只能消除窄带周期性噪声。
另外还有一种Hybrid ANC的结构,同时包含feedforward和feedback结构,主要的优点是可以节省自适应滤波器的阶数。
Reference
主要参照[1],非常详细的一篇tutorial review,书[2]详细推导和说明了[1]中的细节。图1截自jabra官网,图2和图3来自[3],图4来自Wikipedia。 [1]: Kuo S M, Morgan D R. Active noise control: a tutorial review[J]. Proceedings of the IEEE, 1999, 87(6):943-973.[2]: Kuo S M, Morgan D. Active Noise Control Systems: Algorithms and DSP Implementations[M]. John Wiley & Sons, Inc. 1996.
[3]: Kajikawa Y, Gan W S, Kuo S M. Recent advances on active noise control: open issues and innovative applications[J]. Apsipa Transactions on Signal & Information Processing, 2012, 1(2):e3.