{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 fjr115 的文章《Camera sensor bring up》','https://www.xiaopingtou.net/article-79865.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
众所周知,camera在我们生活中应用十分广泛,在未来智能硬件社会,camera就是设备的眼睛,它的机器视觉也将扮演非常重要的角 {MOD}。在我们移动设备终端中,我们知道camera模组是由镜头(lens)、传感器(sensor)、软板(FPC)、图像处理芯片(DSP)等4部分组成。决定一个摄像头好坏的重要部件是:镜头(lens)、图像处理芯片 (DSP)、传感器(sensor)。而今天我们主要偏向于软件侧,来介绍下Dragonboard410C Camera
sensor bring up的一个配置。
本文主要分为两部分来介绍要注意的配置
第一部分、 Kernel 及 vendor porting( Sensor dtsi 及上下电时序)
第二部分 vendor层参数(其中包括 csiphy 、csid和其他参数)
(针对的是 msm8916,也兼容msm8926平台)
一、 Kernel及Vendor porting:
1、新 Porting 一颗 sensor kernel 需要添加和配置的 @arch/arm/configs/msm8226_defconfig
+ CONFIG_IMX135=y
@arch/arm/mach-msm/clock-8226.c
+ CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "20.qcom,camera"),
+ CLK_LOOKUP("cam_clk", camss_mclk0_clk.c, "20.qcom,camera"),
+ CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "20.qcom,eeprom"),
+ CLK_LOOKUP("cam_clk", camss_mclk0_clk.c, "20.qcom,eeprom"),
@arch/arm/boot/dts/msm8226-camera-sensor-qrd.dtsi
+ "qcom,imx135"
……
@ drivers/media/platform/msm/camera_v2/Kconfig
+ config IMX135
@drivers/media/platform/msm/camera_v2/sensor/Makefile
+ obj-$(CONFIG_IMX135) += imx135.o
@drivers/media/platform/msm/camera_v2/sensor/imx135.c 2、新 Porting 一颗 sensor User 需要添加和配置的 @vendor/qcom/proprietary/common/config/device-vendor.mk
+ MM_CAMERA += libchromatix_imx135_common
+ MM_CAMERA += libchromatix_imx135_default_video
+ MM_CAMERA += libchromatix_imx135_hfr_60
+ MM_CAMERA += libchromatix_imx135_hfr_90
+ MM_CAMERA += libchromatix_imx135_hfr_120
+ MM_CAMERA += libchromatix_imx135_liveshot
+ MM_CAMERA += libchromatix_imx135_preview
+ MM_CAMERA += libchromatix_imx135_snapshot
+ MM_CAMERA += libchromatix_imx135_video_hd
+ MM_CAMERA += libchromatix_imx135_zsl
+ MM_CAMERA += libmmcamera_imx135
@vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/modules/sensors/sens
or_libs/imx135
Add imx135 folder
Android.mk/imx135_lib.c imx135_lib.h
Note: build 出来的库放在 system/vendor/lib/下面
@vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/modules/sensors/chro
matix/0301/libchromatix/
Add chromatix_imx135 folder
Note: build 出来的库放在 system/vendor/lib/下面 3、 kernel 中需要客制化的地方 1) kernel 中 dtsi 详解
&cci { ……
qcom,camera@20 {
compatible = "qcom,imx135";
reg = <0x20>;
qcom,slave-id = <0x20 0x0016 0x0135>;
//0x20 是 sensor I2C 地址,高 7bit 是 I2C slave 地址,最低位是写标记 0
//0x16 sensor ID 高位地址 0x17 ID 低位地址
//msm_sensor.c 中读取 id 的时候设置为双字节读取,所以这里设置高位地址即可
qcom,csiphy-sd-index = <0>; // 1:前置 mipi 0:后者 mipi 根据硬件连接决定 cs0、 cs1.
qcom,csid-sd-index = <0>; // CSID 的连接,选哪个
qcom,actuator-src = <&actuator1>;
qcom,led-flash-src = <&led_flash1>;
//qcom,eeprom-src = <&eeprom1>; add by chenqiang for CR01296254 20140618
qcom,mount-angle = <90>;//sensor 成像方向与手机主板的角度
qcom,sensor-name = "imx135";
//sensor 的名字,这个名字影响到加载 lib.so 库,在 kernel 层解析完会传到 vendor 层的
//sensor.c 中,在这个函数中会去获取到这个名字,这个名字必须和 lib 库的名字一样,否则
//无法解析出 lib 库,即无法获取到 lib 库中的函数
cam_vdig-supply = <&pm8226_l5>;//L5 的意思是电源类型是 LDO 输出
cam_vana-supply = <&pm8226_l19>;
cam_vio-supply = <&pm8226_lvs1>;//LVS 输出
cam_vaf-supply = <&pm8226_l15>;
qcom,cam-vreg-name = "cam_vdig", "cam_vio", "cam_vana",
"cam_vaf";
qcom,cam-vreg-type = <0 1 0 0>; //0 : LDO 1:LVS
qcom,cam-vreg-min-voltage = <1200000 0 2850000 2800000>;
//这里是设置具体的电压范围或者值
qcom,cam-vreg-max-voltage = <1200000 0 2850000 2800000>;
qcom,cam-vreg-op-mode = <200000 0 80000 100000>; //电流值
qcom,gpio-no-mux = <0>; // 1、表示 gpio mux 不可用 0、表示可用
gpios = <&msmgpio 26 0>,
<&msmgpio 37 0>,
<&msmgpio 36 0>,
<&msmgpio 38 0>,//avdd
<&msmgpio 22 0>,//dvdd
<&msmgpio 34 0>;//AF
qcom,gpio-reset = <1>;
qcom,gpio-standby = <2>;
qcom,gpio-vana = <3>;
qcom,gpio-vdig = <4>;
qcom,gpio-af-pwdm = <5>;
qcom,gpio-req-tbl-num = <0 1 2 3 4 5>;
qcom,gpio-req-tbl-flags = <1 0 0 0 0 0>;
//gpio 的输入输出设定,第一位是 MCLK,不属于 gpio,所以这里设定为 1
qcom,gpio-req-tbl-label = "CAMIF_MCLK",
"CAM_RESET",
"CAM_STANDBY",
"CAM_VANA",
"CAM_VDIG",
"CAM_AF_PWDM";
qcom,gpio-set-tbl-num = <1 1>;
qcom,gpio-set-tbl-flags = <0 2>;
qcom,gpio-set-tbl-delay = <1000 30000>;
qcom,csi-lane-assign = <0x4320>;
//这个和硬件原理图对应,表示 4 3 2 0 这几条线作为 mipi 数据线, 1 作为时钟线
qcom,csi-lane-mask = <0x1F>; // 使用几条 lan 这里是使用 4 条 0x1f = 00o1 1111
qcom,sensor-position = <0>; // 1:前置 0:后置
qcom,sensor-mode = <0>; // 传感器的数据格式 1:yuv 格式 0:bayer 格式
qcom,sensor-type = <0>;
qcom,cci-master = <0>;
status = "ok";
};
……
} 2) kernel 中上电时序, Power setting 需要根据 datasheet 的上电时序来写 Sensor 的上下电时序以数组的格式写于驱动的 msm_sensor_power_setting 数据结
构中,
static struct msm_sensor_power_setting imx135_power_setting[] = {
…
{
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_VDIG,
.config_val = GPIO_OUT_LOW,
.delay = 0,
},
… }
DateSheet 中对电压和时序的说明: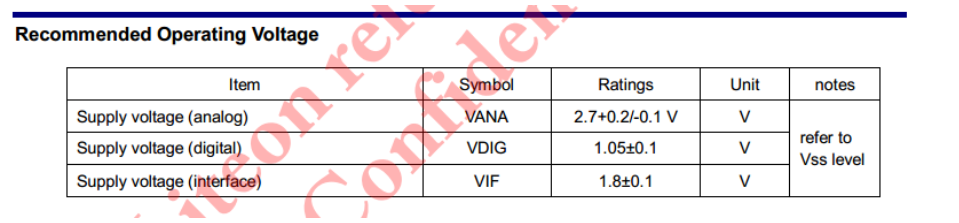


msm8226-camera-sensor-qrd.dtsi
cam_vdig-supply = <&pm8226_l5>;
cam_vana-supply = <&pm8226_l19>;
cam_vio-supply = <&pm8226_lvs1>;
cam_vaf-supply = <&pm8226_l15>;
qcom,cam-vreg-name = "cam_vdig", "cam_vio", "cam_vana",
"cam_vaf";
qcom,cam-vreg-type = <0 1 0 0>;
qcom,cam-vreg-min-voltage = <1200000 0 2850000 2800000>;
qcom,cam-vreg-max-voltage = <1200000 0 2850000 2800000>;
qcom,cam-vreg-op-mode = <200000 0 80000 100000>;
msm8226-regulator.dtsi
rpm-regulator-ldoa5 {
status = "okay";
pm8226_l5: regulator-l5 {
regulator-name = "8226_l5";
regulator-min-microvolt = <1200000>;
regulator-max-microvolt = <1200000>;
qcom,init-voltage = <1200000>;
status = "okay";
};
};
上电时序和下电时序都可以分别加在 msm_sensor_power_setting_array 数组中. 如果
power_down_setting/size_down 数据成员没有添加,下电时序会使用上电时序的反时序.
二、 Vendor 层参数
1、 CSIPHY、 CSID
如上图所示, CSID 是一个数据流控制器
像 8939 上有 3 个 D-PHY 对应有四个 csid,前两个 csid 分别控制前两个 D-PHY
后两个 csid 各有分工,因为 8939 支持第三路 D-PHY 可以用作 4lane 的 camera
也可以用作 1lane 的两个 camera 如果是后一种情况的话,就需要两个 csid 来分别走数据流。
1>、 MIPI 接收器配置 (CSIPHY CSID)
Sensor 通过 MIPI CSI2 传输图像,高通接收器通过 MIPI CSI PHY 和 CSID 接收相应数据。
CSI-PHY、 and CSID config (code 中的具体设置参考有道笔记)
在 vendor 层中有 csi 的配置,具体配置结构体如下:
static struct csi_lane_params_t csi_lane_params = {
.csi_lane_assign = 0x4320,
.csi_lane_mask = 0x1F,//0001 1111
.csi_if = 1,
.csid_core = { 0 },
.csi_phy_sel = 0,
};
static struct msm_camera_csid_vc_cfg imx135_cid_cfg[] = {
{ 0, CSI_RAW10, CSI_DECODE_10BIT },
{ 1, 0x35, CSI_DECODE_8BIT },
{ 2, CSI_EMBED_DATA, CSI_DECODE_8BIT}
};
static struct msm_camera_csi2_params imx135_csi_params = {
.csid_params = {
.lane_cnt = 4,
.lut_params = {
.num_cid = ARRAY_SIZE(imx135_cid_cfg),
.vc_cfg = {
&imx135_cid_cfg[0],
&imx135_cid_cfg[1],
&imx135_cid_cfg[2],
},
},
},
.csiphy_params = {
.lane_cnt = 4,
.settle_cnt = 0x1B, //mipi 从低速到高速的一个缓冲时间
},
};


CSI-D 配置:
2、 Vendor 层其他参数 1)输出尺寸表 out_info
{
/* full size @ 22.27 fps*/
.x_output = 4208,
.y_output = 3120,
.line_length_pclk = 4572,
.frame_length_lines = 3142,
.vt_pixel_clk = 360000000, //PCLK 时钟,数据同步时钟,
.op_pixel_clk = 360000000,
.binning_factor = 1, //当这个为 0 和 1 的时候没有影响,当为 2 的时候会影响到 line_count
的大小
.max_fps = 24.01, //VFE 的时钟,
.min_fps = 7.5,
.mode = SENSOR_DEFAULT_MODE,
},

2)曝光设定寄存器地址 static struct msm_sensor_exp_gain_info_t exp_gain_info = {
.coarse_int_time_addr = 0x0202,
.global_gain_addr = 0x0205,
.vert_offset = 4,
};
vert_offset – 曝光行数上限的边界值,曝光行数任何情况下都应该小于
frame_length_lines 减去 vert_offset. 3)输出控制寄存器地址 static struct msm_sensor_output_reg_addr_t output_reg_addr = {
.x_output = 0x034C,
.y_output = 0x034E,
.line_length_pclk = 0x0342,
.frame_length_lines = 0x0340,
};
4)sensor_stream_info_t static struct sensor_pix_fmt_info_t imx135_pix_fmt0_fourcc[] = {
{ V4L2_PIX_FMT_SRGGB10 },
{ MSM_V4L2_PIX_FMT_META },
};
static struct sensor_pix_fmt_info_t imx135_pix_fmt1_fourcc[] = {
{ MSM_V4L2_PIX_FMT_META },
};
static sensor_stream_info_t imx135_stream_info[] = {
{ 2, &imx135_cid_cfg[0], imx135_pix_fmt0_fourcc },
{ 1, &imx135_cid_cfg[1], imx135_pix_fmt1_fourcc },
};
这个和 kernel 中的 v4l2_subdev_info.Code 对应
5) Gain 转换函数
real gain 换算成寄存器 gain(写到寄存器里的那个值)
static uint16_t imx135_real_to_register_gain(float gain) {
uint16_t reg_gain;
if (gain < 1.0)
gain = 1.0;
if (gain > 8.0)
gain = 8.0;
reg_gain = (uint16_t)(256.0 - 256.0 / gain);
return reg_gain;
}
sensor gain 换算成 real gain
float imx135_register_to_real_gain(uint16_t reg_gain) {
float gain;
if (reg_gain > 224)
reg_gain = 224;
gain = 256.0 / (256.0 - reg_gain);
return gain;
}
Datasheet 中有 gain 的转换
6)
static int32_t imx135_calculate_exposure
exp_info->reg_gain = imx135_real_to_register_gain(real_gain);( real gain 换算从 sensor register gain)
exp_info->digital_gain = real_gain / sensor_real_gain;(用 ISP gain 补上 real gain 到 sensor gain 换算中带来的损失)
exp_info->line_count = line_count;(曝光时间) 7) imx135_fill_exposure_array
执行 AEC 的结果,写曝光时间和 gain(需要保证 frame_length_lines 至少要比coarse_int_time 长 vert_offset)
这个要根据 sensor 的曝光时间和 gain 的写法更改
本文主要分为两部分来介绍要注意的配置
第一部分、 Kernel 及 vendor porting( Sensor dtsi 及上下电时序)
第二部分 vendor层参数(其中包括 csiphy 、csid和其他参数)
(针对的是 msm8916,也兼容msm8926平台)
一、 Kernel及Vendor porting:
1、新 Porting 一颗 sensor kernel 需要添加和配置的 @arch/arm/configs/msm8226_defconfig
+ CONFIG_IMX135=y
@arch/arm/mach-msm/clock-8226.c
+ CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "20.qcom,camera"),
+ CLK_LOOKUP("cam_clk", camss_mclk0_clk.c, "20.qcom,camera"),
+ CLK_LOOKUP("cam_src_clk", mclk0_clk_src.c, "20.qcom,eeprom"),
+ CLK_LOOKUP("cam_clk", camss_mclk0_clk.c, "20.qcom,eeprom"),
@arch/arm/boot/dts/msm8226-camera-sensor-qrd.dtsi
+ "qcom,imx135"
……
@ drivers/media/platform/msm/camera_v2/Kconfig
+ config IMX135
@drivers/media/platform/msm/camera_v2/sensor/Makefile
+ obj-$(CONFIG_IMX135) += imx135.o
@drivers/media/platform/msm/camera_v2/sensor/imx135.c 2、新 Porting 一颗 sensor User 需要添加和配置的 @vendor/qcom/proprietary/common/config/device-vendor.mk
+ MM_CAMERA += libchromatix_imx135_common
+ MM_CAMERA += libchromatix_imx135_default_video
+ MM_CAMERA += libchromatix_imx135_hfr_60
+ MM_CAMERA += libchromatix_imx135_hfr_90
+ MM_CAMERA += libchromatix_imx135_hfr_120
+ MM_CAMERA += libchromatix_imx135_liveshot
+ MM_CAMERA += libchromatix_imx135_preview
+ MM_CAMERA += libchromatix_imx135_snapshot
+ MM_CAMERA += libchromatix_imx135_video_hd
+ MM_CAMERA += libchromatix_imx135_zsl
+ MM_CAMERA += libmmcamera_imx135
@vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/modules/sensors/sens
or_libs/imx135
Add imx135 folder
Android.mk/imx135_lib.c imx135_lib.h
Note: build 出来的库放在 system/vendor/lib/下面
@vendor/qcom/proprietary/mm-camera/mm-camera2/media-controller/modules/sensors/chro
matix/0301/libchromatix/
Add chromatix_imx135 folder
Note: build 出来的库放在 system/vendor/lib/下面 3、 kernel 中需要客制化的地方 1) kernel 中 dtsi 详解
&cci { ……
qcom,camera@20 {
compatible = "qcom,imx135";
reg = <0x20>;
qcom,slave-id = <0x20 0x0016 0x0135>;
//0x20 是 sensor I2C 地址,高 7bit 是 I2C slave 地址,最低位是写标记 0
//0x16 sensor ID 高位地址 0x17 ID 低位地址
//msm_sensor.c 中读取 id 的时候设置为双字节读取,所以这里设置高位地址即可
qcom,csiphy-sd-index = <0>; // 1:前置 mipi 0:后者 mipi 根据硬件连接决定 cs0、 cs1.
qcom,csid-sd-index = <0>; // CSID 的连接,选哪个
qcom,actuator-src = <&actuator1>;
qcom,led-flash-src = <&led_flash1>;
//qcom,eeprom-src = <&eeprom1>; add by chenqiang for CR01296254 20140618
qcom,mount-angle = <90>;//sensor 成像方向与手机主板的角度
qcom,sensor-name = "imx135";
//sensor 的名字,这个名字影响到加载 lib.so 库,在 kernel 层解析完会传到 vendor 层的
//sensor.c 中,在这个函数中会去获取到这个名字,这个名字必须和 lib 库的名字一样,否则
//无法解析出 lib 库,即无法获取到 lib 库中的函数
cam_vdig-supply = <&pm8226_l5>;//L5 的意思是电源类型是 LDO 输出
cam_vana-supply = <&pm8226_l19>;
cam_vio-supply = <&pm8226_lvs1>;//LVS 输出
cam_vaf-supply = <&pm8226_l15>;
qcom,cam-vreg-name = "cam_vdig", "cam_vio", "cam_vana",
"cam_vaf";
qcom,cam-vreg-type = <0 1 0 0>; //0 : LDO 1:LVS
qcom,cam-vreg-min-voltage = <1200000 0 2850000 2800000>;
//这里是设置具体的电压范围或者值
qcom,cam-vreg-max-voltage = <1200000 0 2850000 2800000>;
qcom,cam-vreg-op-mode = <200000 0 80000 100000>; //电流值
qcom,gpio-no-mux = <0>; // 1、表示 gpio mux 不可用 0、表示可用
gpios = <&msmgpio 26 0>,
<&msmgpio 37 0>,
<&msmgpio 36 0>,
<&msmgpio 38 0>,//avdd
<&msmgpio 22 0>,//dvdd
<&msmgpio 34 0>;//AF
qcom,gpio-reset = <1>;
qcom,gpio-standby = <2>;
qcom,gpio-vana = <3>;
qcom,gpio-vdig = <4>;
qcom,gpio-af-pwdm = <5>;
qcom,gpio-req-tbl-num = <0 1 2 3 4 5>;
qcom,gpio-req-tbl-flags = <1 0 0 0 0 0>;
//gpio 的输入输出设定,第一位是 MCLK,不属于 gpio,所以这里设定为 1
qcom,gpio-req-tbl-label = "CAMIF_MCLK",
"CAM_RESET",
"CAM_STANDBY",
"CAM_VANA",
"CAM_VDIG",
"CAM_AF_PWDM";
qcom,gpio-set-tbl-num = <1 1>;
qcom,gpio-set-tbl-flags = <0 2>;
qcom,gpio-set-tbl-delay = <1000 30000>;
qcom,csi-lane-assign = <0x4320>;
//这个和硬件原理图对应,表示 4 3 2 0 这几条线作为 mipi 数据线, 1 作为时钟线
qcom,csi-lane-mask = <0x1F>; // 使用几条 lan 这里是使用 4 条 0x1f = 00o1 1111
qcom,sensor-position = <0>; // 1:前置 0:后置
qcom,sensor-mode = <0>; // 传感器的数据格式 1:yuv 格式 0:bayer 格式
qcom,sensor-type = <0>;
qcom,cci-master = <0>;
status = "ok";
};
……
} 2) kernel 中上电时序, Power setting 需要根据 datasheet 的上电时序来写 Sensor 的上下电时序以数组的格式写于驱动的 msm_sensor_power_setting 数据结
构中,
static struct msm_sensor_power_setting imx135_power_setting[] = {
…
{
.seq_type = SENSOR_GPIO,
.seq_val = SENSOR_GPIO_VDIG,
.config_val = GPIO_OUT_LOW,
.delay = 0,
},
… }
DateSheet 中对电压和时序的说明:
msm8226-camera-sensor-qrd.dtsi
cam_vdig-supply = <&pm8226_l5>;
cam_vana-supply = <&pm8226_l19>;
cam_vio-supply = <&pm8226_lvs1>;
cam_vaf-supply = <&pm8226_l15>;
qcom,cam-vreg-name = "cam_vdig", "cam_vio", "cam_vana",
"cam_vaf";
qcom,cam-vreg-type = <0 1 0 0>;
qcom,cam-vreg-min-voltage = <1200000 0 2850000 2800000>;
qcom,cam-vreg-max-voltage = <1200000 0 2850000 2800000>;
qcom,cam-vreg-op-mode = <200000 0 80000 100000>;
msm8226-regulator.dtsi
rpm-regulator-ldoa5 {
status = "okay";
pm8226_l5: regulator-l5 {
regulator-name = "8226_l5";
regulator-min-microvolt = <1200000>;
regulator-max-microvolt = <1200000>;
qcom,init-voltage = <1200000>;
status = "okay";
};
};
上电时序和下电时序都可以分别加在 msm_sensor_power_setting_array 数组中. 如果
power_down_setting/size_down 数据成员没有添加,下电时序会使用上电时序的反时序.
二、 Vendor 层参数
1、 CSIPHY、 CSID
如上图所示, CSID 是一个数据流控制器
像 8939 上有 3 个 D-PHY 对应有四个 csid,前两个 csid 分别控制前两个 D-PHY
后两个 csid 各有分工,因为 8939 支持第三路 D-PHY 可以用作 4lane 的 camera
也可以用作 1lane 的两个 camera 如果是后一种情况的话,就需要两个 csid 来分别走数据流。
1>、 MIPI 接收器配置 (CSIPHY CSID)
Sensor 通过 MIPI CSI2 传输图像,高通接收器通过 MIPI CSI PHY 和 CSID 接收相应数据。
CSI-PHY、 and CSID config (code 中的具体设置参考有道笔记)
在 vendor 层中有 csi 的配置,具体配置结构体如下:
static struct csi_lane_params_t csi_lane_params = {
.csi_lane_assign = 0x4320,
.csi_lane_mask = 0x1F,//0001 1111
.csi_if = 1,
.csid_core = { 0 },
.csi_phy_sel = 0,
};
static struct msm_camera_csid_vc_cfg imx135_cid_cfg[] = {
{ 0, CSI_RAW10, CSI_DECODE_10BIT },
{ 1, 0x35, CSI_DECODE_8BIT },
{ 2, CSI_EMBED_DATA, CSI_DECODE_8BIT}
};
static struct msm_camera_csi2_params imx135_csi_params = {
.csid_params = {
.lane_cnt = 4,
.lut_params = {
.num_cid = ARRAY_SIZE(imx135_cid_cfg),
.vc_cfg = {
&imx135_cid_cfg[0],
&imx135_cid_cfg[1],
&imx135_cid_cfg[2],
},
},
},
.csiphy_params = {
.lane_cnt = 4,
.settle_cnt = 0x1B, //mipi 从低速到高速的一个缓冲时间
},
};
CSI-D 配置:
2、 Vendor 层其他参数 1)输出尺寸表 out_info
{
/* full size @ 22.27 fps*/
.x_output = 4208,
.y_output = 3120,
.line_length_pclk = 4572,
.frame_length_lines = 3142,
.vt_pixel_clk = 360000000, //PCLK 时钟,数据同步时钟,
.op_pixel_clk = 360000000,
.binning_factor = 1, //当这个为 0 和 1 的时候没有影响,当为 2 的时候会影响到 line_count
的大小
.max_fps = 24.01, //VFE 的时钟,
.min_fps = 7.5,
.mode = SENSOR_DEFAULT_MODE,
},
2)曝光设定寄存器地址 static struct msm_sensor_exp_gain_info_t exp_gain_info = {
.coarse_int_time_addr = 0x0202,
.global_gain_addr = 0x0205,
.vert_offset = 4,
};
vert_offset – 曝光行数上限的边界值,曝光行数任何情况下都应该小于
frame_length_lines 减去 vert_offset. 3)输出控制寄存器地址 static struct msm_sensor_output_reg_addr_t output_reg_addr = {
.x_output = 0x034C,
.y_output = 0x034E,
.line_length_pclk = 0x0342,
.frame_length_lines = 0x0340,
};
4)sensor_stream_info_t static struct sensor_pix_fmt_info_t imx135_pix_fmt0_fourcc[] = {
{ V4L2_PIX_FMT_SRGGB10 },
{ MSM_V4L2_PIX_FMT_META },
};
static struct sensor_pix_fmt_info_t imx135_pix_fmt1_fourcc[] = {
{ MSM_V4L2_PIX_FMT_META },
};
static sensor_stream_info_t imx135_stream_info[] = {
{ 2, &imx135_cid_cfg[0], imx135_pix_fmt0_fourcc },
{ 1, &imx135_cid_cfg[1], imx135_pix_fmt1_fourcc },
};
这个和 kernel 中的 v4l2_subdev_info.Code 对应
5) Gain 转换函数
real gain 换算成寄存器 gain(写到寄存器里的那个值)
static uint16_t imx135_real_to_register_gain(float gain) {
uint16_t reg_gain;
if (gain < 1.0)
gain = 1.0;
if (gain > 8.0)
gain = 8.0;
reg_gain = (uint16_t)(256.0 - 256.0 / gain);
return reg_gain;
}
sensor gain 换算成 real gain
float imx135_register_to_real_gain(uint16_t reg_gain) {
float gain;
if (reg_gain > 224)
reg_gain = 224;
gain = 256.0 / (256.0 - reg_gain);
return gain;
}
Datasheet 中有 gain 的转换
6)
static int32_t imx135_calculate_exposure
exp_info->reg_gain = imx135_real_to_register_gain(real_gain);( real gain 换算从 sensor register gain)
exp_info->digital_gain = real_gain / sensor_real_gain;(用 ISP gain 补上 real gain 到 sensor gain 换算中带来的损失)
exp_info->line_count = line_count;(曝光时间) 7) imx135_fill_exposure_array
执行 AEC 的结果,写曝光时间和 gain(需要保证 frame_length_lines 至少要比coarse_int_time 长 vert_offset)
这个要根据 sensor 的曝光时间和 gain 的写法更改