{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.xiaopingtou.cn//data/attach/topic/topicKPo7gB.jpg', '推荐 weixin_34288121 的文章《数字信号处理相关11(用好Vivado HLS ,这三大误区要避免! )》','https://www.xiaopingtou.net/article-80314.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
第一部分:
High-level Synthesis Vendors
来自:https://blog.csdn.net/changan2001/article/details/5625316 PICO from SynforaAutoPilot from AutoESL
C-to-Silicon from Cadence Design Systems
Synphony HLS from Synopsys
PowerOpt from ChipVision
Cynthesizer from Forte Design Systems
Catapult C from Mentor Graphics
CyberWorkBench from NEC
C-to-Verilog from C-to-Verilog.com
C2R from CebaTech
CoDeveloper from Impulse Accelerated Technologies
eXCite from Y Explorations
Synfora发展了这么多年,工具做的不错,是AutoESL的主要竞争对手。 AutoESL绝对是后起之秀,并且有长江后浪推前浪,一代更比一代强的趋势。能够做到比手写RTL 的QoR更好的效果绝不是浪得虚名。 Catapult C是江湖元老,各方面比较成熟,但是价格也不菲啊,在国内这种处处都是廉价劳动力的环境下,很难赢得企业的青睐。这也是其他所有HLS工具面临的挑战。 Forte在SystemC方面是老大,发展很早,但是不支持C/C++,受到很大的局限。 其他几个工具不说也罢,表现平平。 来自:http://www.sohu.com/a/216404161_505803 第二部分 用好Vivado HLS ,这三大误区要避免! 目前,在高层次综合(HLS, High Level Synthesis)领域,Vivado HLS可谓独树一帜。它有效地拉近了软件工程师与FPGA之间的距离,加速了算法开发的进程,缩短了产品上市时间。对于工程师,尤其是软件工程师而言是一个福音。在实际工程中,如何利用好这一工具仍值得考究。本文将介绍使用Vivado HLS时的几个误区。 误区1 只要是C或者C++描述的算法都是可综合(可转换成RTL)的。 HLS的可综合功能是有限的,并不是所有的C或者C++语句都可转换成相应的RTL代码。下面这些情形是不可综合的。 1. 动态内存分配 2. 涉及操作系统层面的操作 3. 递归函数 4. 数组规模可变 误区2 既然Vivado HLS支持C、C++和System C,那么用三者任意一种都行。 尽管 Vivado HLS支持C、C++和System C,但支持力度是不一样的。在v2017.4版本ug871 第56页有如下描述。可见,当设计中如果使用到任意精度的数据类型时,采用C++ 和System C 是可以使用Vivado HLS的调试环境的,但是C 描述的算法却是不可以的。而实际上很多真实的硬件模型都要使用任意进度的数据类型,所以要想使用Vivado HLS 的调试功能, 建议最好采用 C++和System
 误区3
只要有源代码即可,没有Test bench也行。
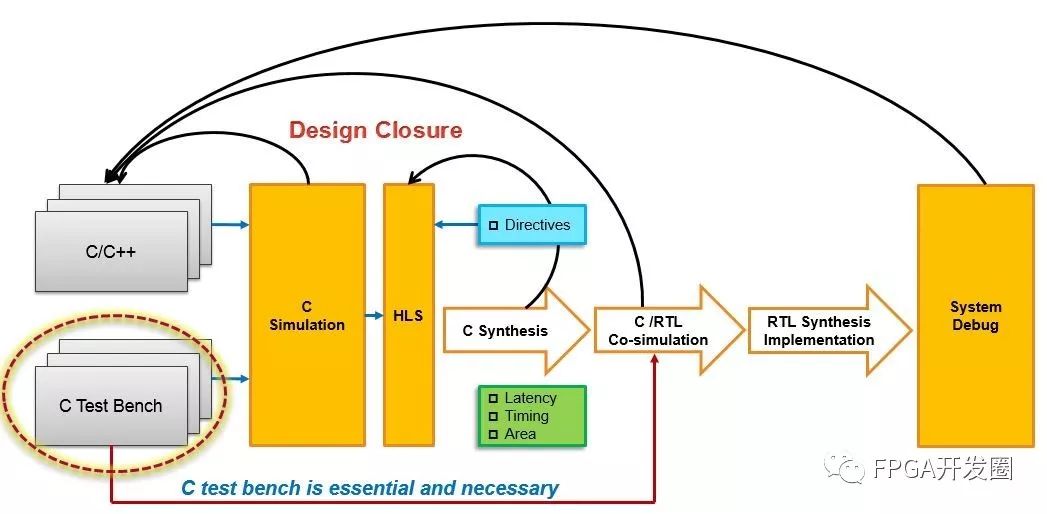
在HLS设计开发中,C Test bench起着举足轻重的作用。C层面算法功能的验证需要用到它;当生成RTL代码时,C和RTL的协同仿真也要用到它。如下图所示。实际上,协同仿真时,RTL代码的输入激励就是由C Test bench生成的。由此可见,C Test bench是整个设计不可或缺的一部分。
误区3
只要有源代码即可,没有Test bench也行。
在HLS设计开发中,C Test bench起着举足轻重的作用。C层面算法功能的验证需要用到它;当生成RTL代码时,C和RTL的协同仿真也要用到它。如下图所示。实际上,协同仿真时,RTL代码的输入激励就是由C Test bench生成的。由此可见,C Test bench是整个设计不可或缺的一部分。